一、無人機避障技術
1. 技術實現方式
傳感器融合:
視覺傳感(RGB/雙目/紅外相機):基于SLAM(同步定位與地圖構建)實現環境建模,但依賴光照條件。
激光雷達(LiDAR):高精度點云建模,但成本高、功耗大,小型無人機難以集成。
超聲波雷達:短距離(5-10米)低成本避障,但易受環境噪聲干擾。
毫米波雷達:穿透性強(雨霧環境適用),但分辨率低于激光雷達。
算法核心:
路徑規劃:A、RRT(快速擴展隨機樹)等算法實時生成避障路徑。
動態障礙物預測:結合卡爾曼濾波或深度學習模型預測運動軌跡。
2. 技術難點
實時性與算力矛盾:10m/s飛行速度下需毫秒級決策,邊緣計算設備(如NVIDIA Jetson)的算力與功耗平衡。
復雜環境適應性:反光表面(玻璃)、低光照、密集動態障礙物(人群)導致傳感器失效。
多傳感器標定與同步:時空同步誤差需控制在厘米/毫秒級,否則融合數據失效。
二、目標識別技術
1. 技術實現方式
基于視覺的識別:
深度學習模型:YOLO、Faster R-CNN等模型部署,需優化模型輕量化(如TensorRT加速)。
多光譜融合:紅外+可見光識別熱源目標(如人體搜救)。
基于信號的識別:
射頻信號(RFID/UWB):UWB定位精度達10cm級,但多徑效應影響穩定性。
聲學信號:特定頻率聲吶信標,抗電磁干擾但傳播距離短。
光學信標:LED編碼閃爍(如MoCAP系統),需直視鏈路。
2. 技術難點
小目標識別:30米外直徑20cm目標的像素不足(如4K相機在30米處分辨率約5cm/像素)。
對抗樣本攻擊:惡意干擾(如對抗貼紙欺騙圖像識別)。
多目標跟蹤(MOT):ID切換問題(如DeepSORT算法需關聯目標特征)。
三、目標發射信號方式
1. 主動信號發射
射頻類:
藍牙Beacon:低功耗(BLE 5.1),但距離<100米。
LoRaWAN:10km級遠距離,但傳輸延遲高(秒級)。
光學類:
紅外信標(IR Beacon):軍用級加密頻段,需定制接收模組。
激光編碼:高指向性,但大氣散射影響接收。
聲學類:
超聲波脈沖編碼:水下無人機常用,空氣衰減嚴重。
2. 被動信號反射
RFID無源標簽:依賴無人機發射激勵信號,識別距離<10米。
二維碼/ArUco標記:依賴視覺識別,傾角>45°時識別率下降。
3. 技術難點:
信號沖突:多目標同頻段信號干擾(需TDMA/FDMA調度)。
能量效率:目標端續航(如救災信標需工作72小時以上)。
隱蔽性:軍事場景需低截獲概率(LPI)信號設計。
四、系統級挑戰與前沿方向
1. 端到端優化
硬件異構計算:FPGA加速信號處理+GPU運行神經網絡。
通信-感知一體化:5G NR的Sidelink技術實現信號傳輸與定位同步。
2. 抗干擾技術
認知無線電:動態跳頻避開干擾頻段。
量子加密信標:量子密鑰分發(QKD)防竊聽。
3. 法規與標準化
頻譜合規:ISM頻段(如2.4GHz)的擁塞問題。
適航認證:民航局(如FAA)對避障系統的可靠性認證(如DO-178C)。
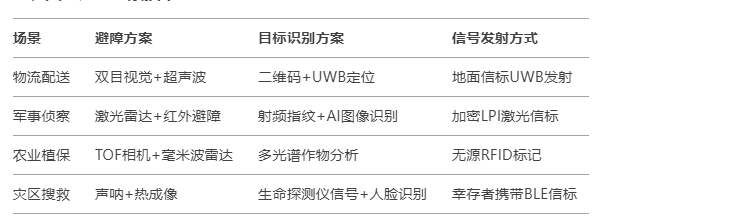
五、典型應用場景技術選型




)
)


![[數據結構]2. 順序表](http://pic.xiahunao.cn/[數據結構]2. 順序表)






Swift筆記20250418)




