目錄
8、快速排序
8.1、Hoare版
8.2、挖坑法
8.3、前后指針法
9、快速排序優化
9.1、三數取中法
9.2、采用插入排序
10、快速排序非遞歸
11、歸并排序
12、歸并排序非遞歸
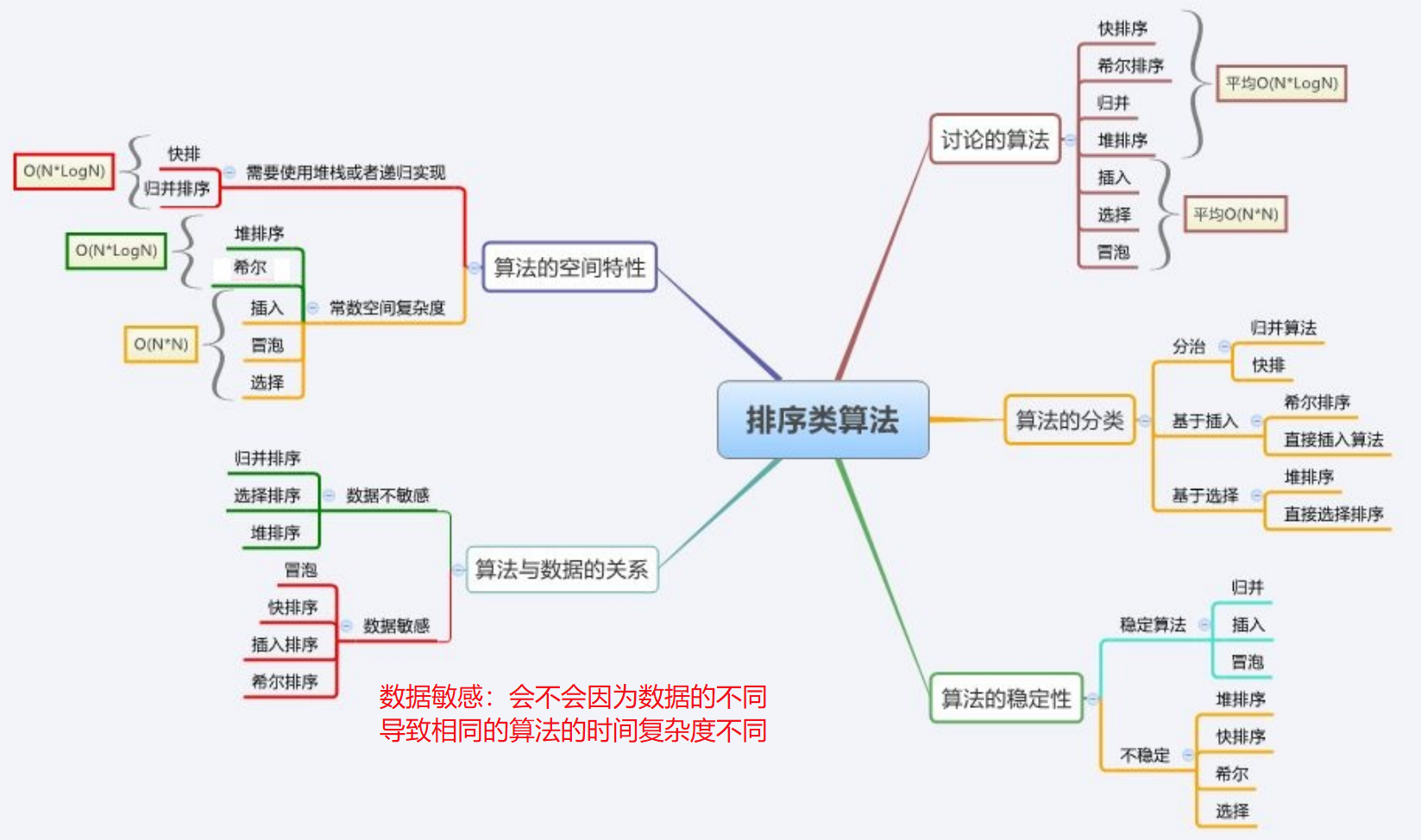
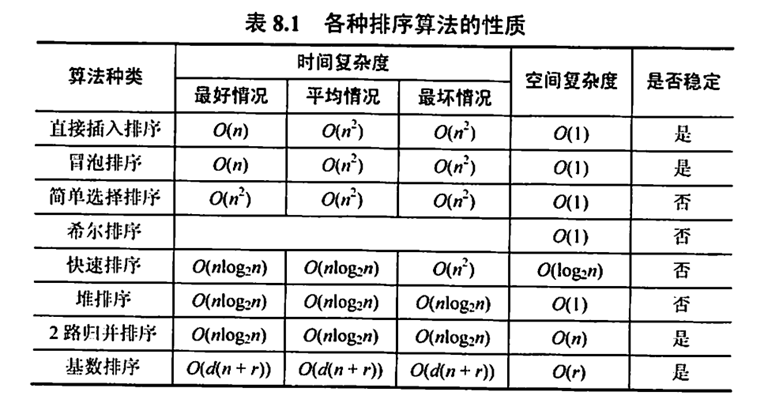
13、排序類算法總結
14、計數排序
15、其他排序
15.1、基數排序
15.2、桶排序
8、快速排序
快速排序是Hoare于1962年提出的一種二叉樹結構的交換排序方法
基本思想:任取待排序元素序列中的某元 素作為基準值,按照該排序碼將待排序集合分割成兩子序列,左子序列中所有元素均小于基準值,右子序列中所有 元素均大于基準值,然后最左右子序列重復該過程,直到所有元素都排列在相應位置上為止
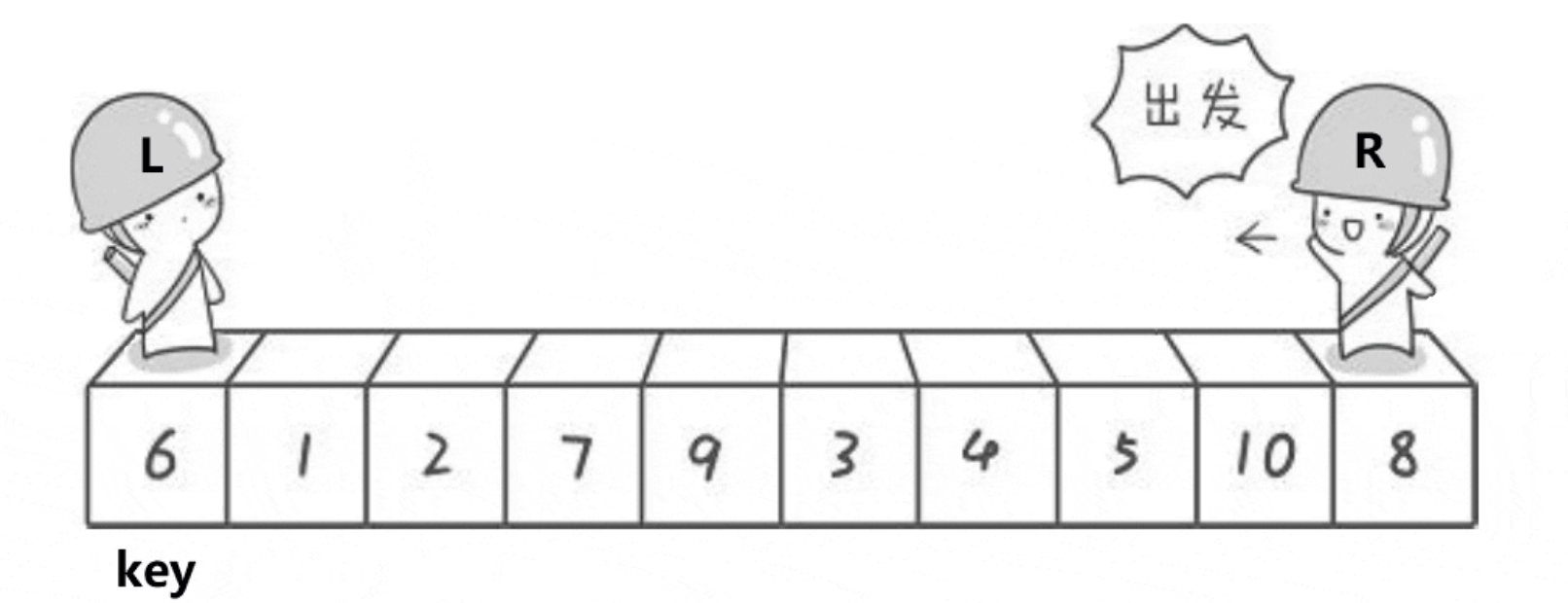
8.1、Hoare版
1. 把第一個值作為基準值 pivot
2. right 從右邊走,遇到比 pivot 大的就停下;left 從左邊走,遇到比 pivot 小的就停下
3. 交換 left 和 right 的值
4.?left 和 right 繼續走,直到 left 和?right 相遇
5.?相遇的位置就是要找的位置,把基準值與該位置交換
public static void quickSort(int[] array) {quick(array,0,array.length-1);}private static void quick(int[] array,int start,int end) {if(start >= end) {return;}int pivot = partitionHoare(array,start,end);quick(array,start,pivot-1);quick(array,pivot+1,end);}private static int partitionHoare(int[] array, int left, int right) {int tmp = array[left];int pivot = left;while (left < right) {// 單獨的循環 不能一直減到超過最左邊的邊界while (left < right && array[right] >= tmp) {right--;}while (left < right && array[left] <= tmp) {left++;}swap(array,left,right);}swap(array,pivot,left);return left;}兩個問題:
1. 為什么 array[right] >= tmp 必須帶等于號
????????可能會出現 left 和 right 無限交換的死循環
2. 為什么從 right 先走而不是 left
????????如果 left 先走可能會出現相遇的是比基準大的數據,最后把大的數據放到了最前面
快速排序總結:
1. 快速排序整體的綜合性能和使用場景都是比較好的,所以才敢叫快速排序
2. 時間復雜度:O(N*logN)
????????最好的情況下:O(N*logN)
????????最壞情況下:O(N^2)? -- 逆序/有序
3. 空間復雜度:O(logN)? -- 遞歸了logN層
????????最好的情況下:O(logN)
????????最壞情況下:O(N)? ?-- 逆序/有序
4. 穩定性:不穩定
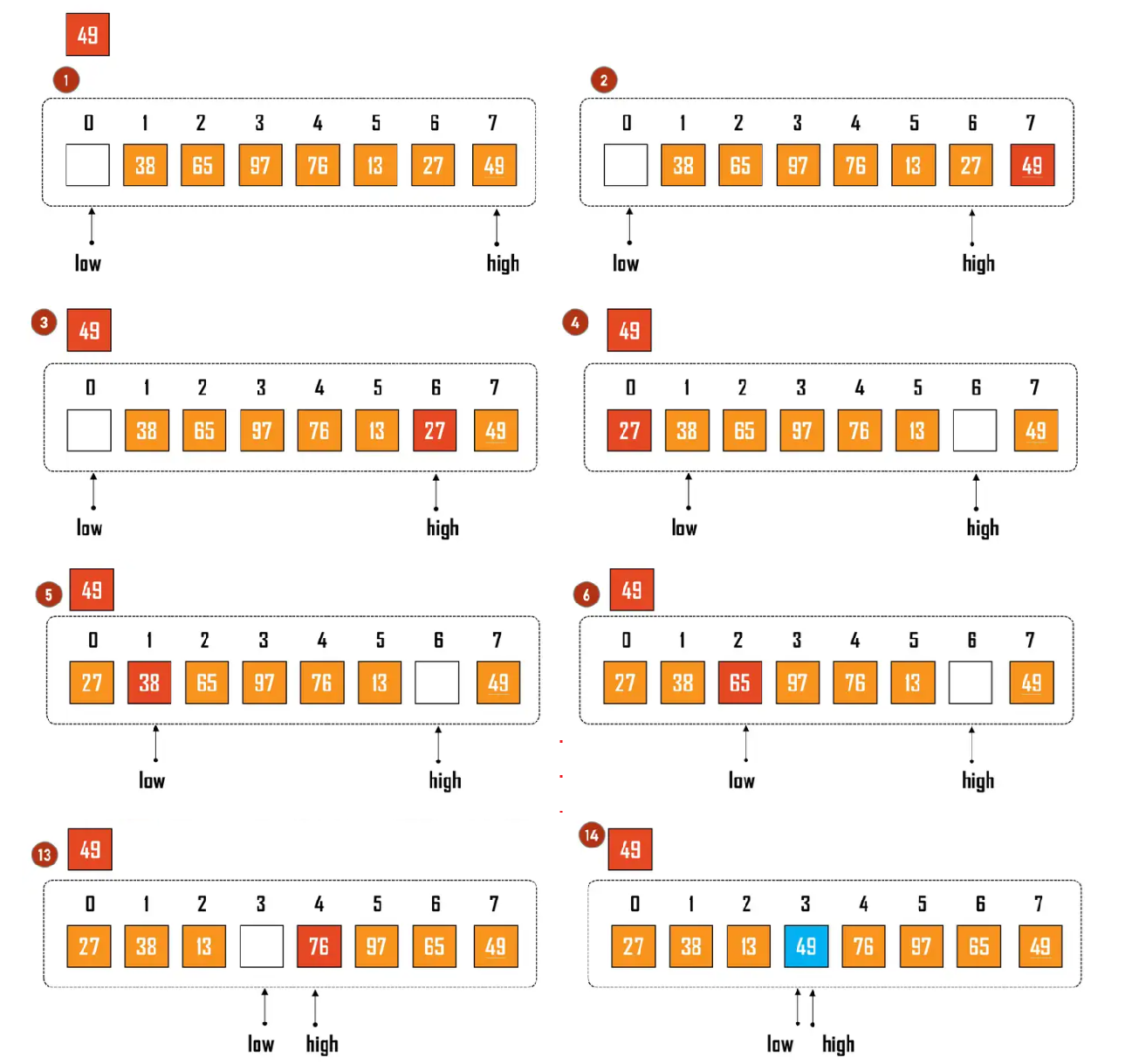
8.2、挖坑法
1. 把第一個值拿出來作為基準值 tmp,第一個值的位置就是第一個坑
2. right 從右邊走,遇到比 pivot 大的就停下,然后把這個值放到上一個坑里,right 就形成了新的坑
3. left 從左邊走,遇到比 tmp 小的就停下,然后把這個值放到坑里,left?就是新的坑
4.?循環2、3,直到 left 和?right 相遇
5.?相遇的位置就是要找的位置,把基準值放在這個位置
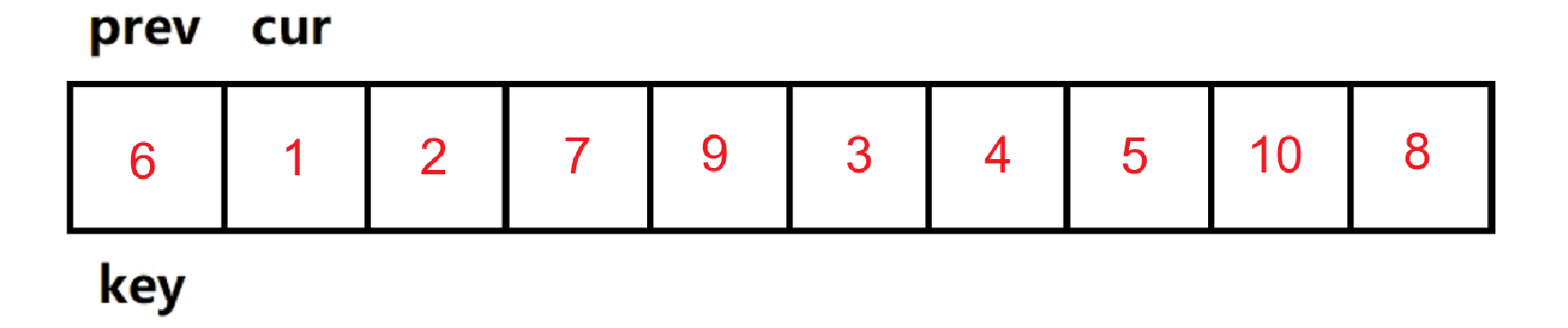
public static void quickSort(int[] array) {quick(array,0,array.length-1);}private static void quick(int[] array,int start,int end) {if(start >= end) {return;}int pivot = partitionHole(array,start,end);quick(array,start,pivot-1);quick(array,pivot+1,end);}private static int partitionHole(int[] array, int left, int right) {int tmp = array[left];while (left < right) {// 單獨的循環 不能一直減到超過最左邊的邊界while (left < right && array[right] >= tmp) {right--;}array[left] = array[right];while (left < right && array[left] <= tmp) {left++;}array[right] = array[left];}array[left] = tmp;return left;}8.3、前后指針法
1.?定義兩根指針cur和prev,初始位置如下圖
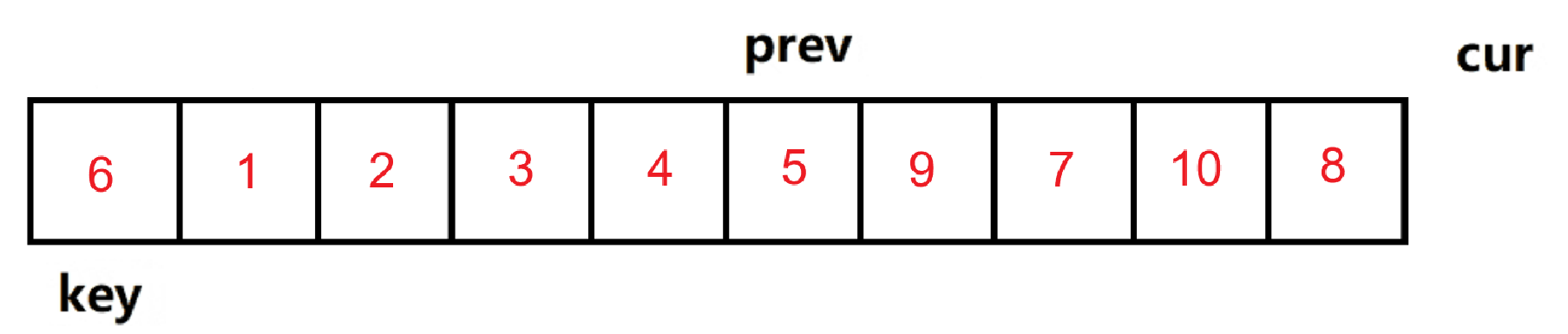
2. cur開始往后走,如果遇到比key小的值,則++prev,然后交換prev和cur指向的元素,再++cur,如果遇到比key大的值,則只++cur
3.?當cur訪問過最后一個元素后,將key的元素與prve訪問的元素交換位置。cur訪問完整個數組后的各元素位置如下圖
private static int partition(int[] array, int left, int right) {int prev = left ;int cur = left+1;while (cur <= right) {if(array[cur] < array[left] && array[++prev] != array[cur]) {swap(array,cur,prev);}cur++;}swap(array,prev,left);return prev;
}
總結:
1. Hoare
2. 挖坑法
3. 前后指針法
這3種方式 ?每次劃分之后的前后順序 有可能是不一樣的
9、快速排序優化
優化的出發點:減少遞歸的次數
9.1、三數取中法
既然有序數組或者有序數組片段會使效率下降,我們就可以讓基準值每次都取大小靠中的數,然后在進行快速排序這樣就可以避免了。但不是完全避免,只是減少了最壞情況出現的概率,最壞情況還是O(n2),但有效提升了運行效率,主要提升的部分是數組中有序的數組片段,減少了循環次數。
// 求中位數的下標private static int middleNum(int[] array,int left,int right) {int mid = (left+right)/2;if(array[left] < array[right]) {if(array[mid] < array[left]) {return left;}else if(array[mid] > array[right]) {return right;}else {return mid;}}else {//array[left] > array[right]if(array[mid] < array[right]) {return right;}else if(array[mid] > array[left]) {return left;}else {return mid;}}}private static void quick(int[] array,int start,int end) {if(start >= end) {return;}//1 2 3 4 5 6 7int index = middleNum(array,start,end);swap(array,index,start);//4 2 3 1 5 6 7int pivot = partition(array,start,end);quick(array,start,pivot-1);quick(array,pivot+1,end);}9.2、采用插入排序
往往一棵樹的最后兩層的結點占整棵樹的絕大多數,所以當遞歸到一定深度時,采用直接插入排序
public static void insertSort(int[] array,int left,int right) {for (int i = left+1; i <= right; i++) {int tmp = array[i];int j = i-1;for (; j >= left ; j--) {if(array[j] > tmp) {array[j+1] = array[j];}else {break;}}array[j+1] = tmp;}}private static void quick(int[] array,int start,int end) {if(start >= end) {return;}if(end - start + 1 <= 15) {insertSort(array, start, end);return;}//1 2 3 4 5 6 7int index = middleNum(array,start,end);swap(array,index,start);//4 2 3 1 5 6 7int pivot = partition(array,start,end);quick(array,start,pivot-1);quick(array,pivot+1,end);}10、快速排序非遞歸
1. 先調用partition方法找到基準
2. 基準左邊和右邊有沒有2個及以上個元素,有就把下標放到棧中3. 判斷棧空不空,不空出棧2個,第一個是新的end,第二個是新的start
4. 棧不為空時,循環執行上述1.2.3
public static void quickSortNor(int[] array) {int start = 0;int end = array.length-1;Stack<Integer> stack = new Stack<>();int pivot = partition(array,start,end);if(pivot > start+1) {stack.push(start);stack.push(pivot-1);}if(pivot+1 < end) {stack.push(pivot+1);stack.push(end);}while (!stack.isEmpty()) {end = stack.pop();start = stack.pop();pivot = partition(array,start,end);if(pivot > start+1) {stack.push(start);stack.push(pivot-1);}if(pivot+1 < end) {stack.push(pivot+1);stack.push(end);}}}11、歸并排序
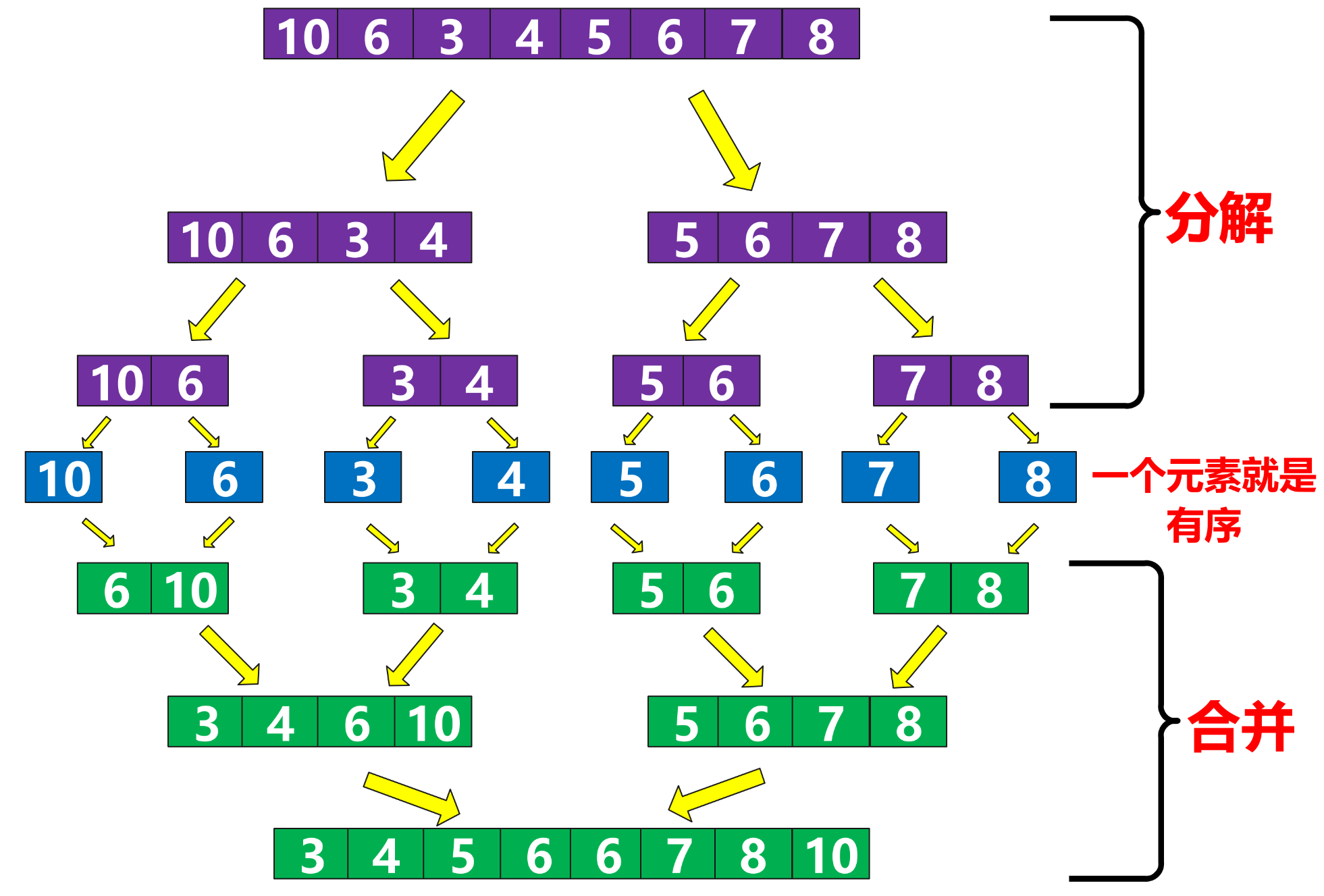
歸并排序是建立在歸并操作上的一種有效的排序算法,該算法是采用分治法的一個非常典型的應用。將已有序的子序列合并,得到完全有序的序列;即先使每個子序列有序,再使子序列段間有序。若將兩個有序表合并成一個有序表,稱為二路歸并
public static void mergeSort(int[] array) {mergeSortFun(array,0,array.length-1);}private static void mergeSortFun(int[] array,int start,int end) {if(start >= end) {return;}int mid = (start+end)/2;mergeSortFun(array,start,mid);mergeSortFun(array,mid+1,end);//合并merge(array,start,mid,end);}private static void merge(int[] array, int left, int mid, int right) {// s1,e1,s2,e2 可以不定義,這樣寫為了好理解int s1 = left;int e1 = mid;int s2 = mid+1;int e2 = right;//定義一個新的數組int[] tmpArr = new int[right-left+1];int k = 0;//tmpArr數組的下標//同時滿足 證明兩個歸并段 都有數據while (s1 <= e1 && s2 <= e2) {if(array[s1] <= array[s2]) {tmpArr[k++] = array[s1++];}else {tmpArr[k++] = array[s2++];}}while (s1 <= e1) {tmpArr[k++] = array[s1++];}while (s2 <= e2) {tmpArr[k++] = array[s2++];}//把排好序的數據 拷貝回原來的數組array當中for (int i = 0; i < tmpArr.length; i++) {array[i+left] = tmpArr[i];}}兩個有序數組合并為一個有序數組代碼:
public static int[] mergeArray(int[] arrayl,int[] array2) {// 注意判斷參數int[] tmp = new int[array1.length+array2.length];int k = 0;int s1 = 0;int el = array1.length-1;int s2 = 0;int e2 = array2.length-1;while (s1 <= el && s2 <= e2) {if(array1[s1] <= array2[s2]) {tmp[k++] = array1[s1++];}else {tmp[k++]=array2[s2++];}}while (s1 <= el) {tmp[k++] = array1[s1++];}while (s2 <= e2) {tmp[k++]= array2[s2++];}return tmp;
}歸并排序總結
1. 歸并的缺點在于需要O(N)的空間復雜度,歸并排序更多的是解決在磁盤中的外排序問題。
2. 時間復雜度:O(N*logN)
3. 空間復雜度:O(N)?????????遞歸調用棧空間:O(logN)
????????合并操作空間:O(N)
4. 穩定性:穩定
海量數據的排序
外部排序:排序過程需要在磁盤等外部存儲進行的排序
前提:內存只有 1G,需要排序的數據有 100G
因為內存中因為無法把所有數據全部放下,所以需要外部排序,而歸并排序是最常用的外部排序
1. 先把文件切分成 200 份,每個 512 M
2. 分別對 512 M 排序,因為內存已經可以放的下,所以任意排序方式都可以
3. 進行2路歸并,同時對 200 份有序文件做歸并過程,最終結果就有序了(在外部存儲進行)
12、歸并排序非遞歸
1. 找到 left、mid、right 的位置和關系,然后調用merge合并
2. 定義 gap 表示當前的分組是每組幾個數據
public static void mergeSortNor(int[] array) {int gap = 1;//每組幾個數據while (gap < array.length) {for (int i = 0; i < array.length; i = i+gap*2) {int left = i;// mid、right 可能會越界int mid = left+gap-1;int right = mid+gap;if(mid >= array.length) {mid = array.length-1;}if(right >= array.length) {right = array.length-1;}merge(array,left,mid,right);}gap*=2;}13、排序類算法總結
14、計數排序
思想:計數排序又稱為鴿巢原理,是對哈希直接定址法的變形應用。 操作步驟:
1. 統計相同元素出現次數
2. 根據統計的結果將序列回收到原來的序列中具體實現:
1.申請一個數組count,大小為待排序數組array的范圍 M
2.遍歷待排序數組array,把數字對應的count數組的下標內容進行++
3.遍歷計數數組count 寫回到待排序數組array,此時需要注意寫的次數和元素值要一樣
4. 最后數組array中存儲的就是有序的序列
public static void countSort(int[] array) {//求數組的最大值 和 最小值 O(N)int minVal = array[0];int maxVal = array[0];for (int i = 1; i < array.length; i++) {if(array[i] < minVal) {minVal = array[i];}if(array[i] > maxVal) {maxVal = array[i];}}//確定計數數組的 長度int len = maxVal - minVal + 1;int[] count = new int[len];//遍歷array數組 把數據出現的次數存儲到計數數組當中 O(N)for (int i = 0; i < array.length; i++) {count[array[i]-minVal]++;}//計數數組已經存放了每個數據出現的次數//遍歷計數數組 把實際的數據寫回array數組 O(M) M表示數據范圍int index = 0;for (int i = 0; i < count.length; i++) {while (count[i] > 0) {//這里需要重寫寫回array 意味著得從array的0位置開始寫array[index] = i+minVal;index++;count[i]--;}}}計數排序的特性總結
1.計數排序是非基于比較的排序2.?計數排序在數據范圍集中時,效率很高,但是適用范圍及場景有限;計數排序的場景:指定范圍內的數據
3. 時間復雜度:O(MAX(N,M))? ?M表示數據范圍
4. 空間復雜度:O(M)
5. 穩定性:穩定;上述代碼是不穩定的寫法
15、其他排序
15.1、基數排序
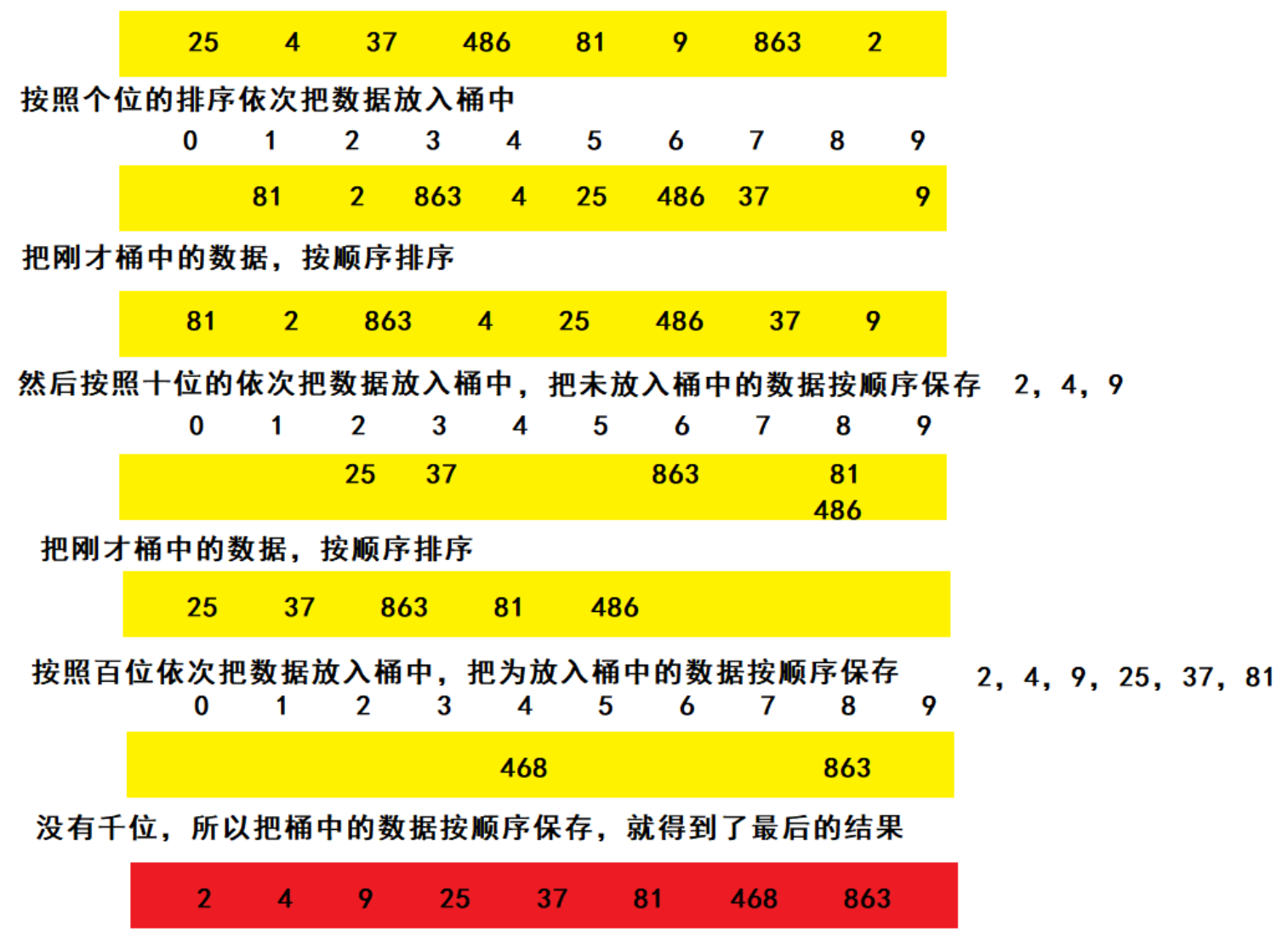
基數排序(Radix Sort)是一種非比較型的排序算法,它通過逐位比較元素的每一位(從最低位到最高位)來實現排序。基數排序的核心思想是將整數按位數切割成不同的數字,然后按每個位數分別進行排序。基數排序的時間復雜度為 O(d*(n+r)),其中 n 為元素個數,d 是最大數字的位數,r 為基數(桶的個數)
時間復雜度分析:
分配依次將每個數放到對應的桶中 O(n)
收集依次將每個桶里的元素拿出來 O(r)? (桶里的元素是用鏈表連接的)
每輪:分配+收集 O(n+r)
如果最大的數字有d位,就需要排d輪
所以時間復雜度為:O(d*(n+r))
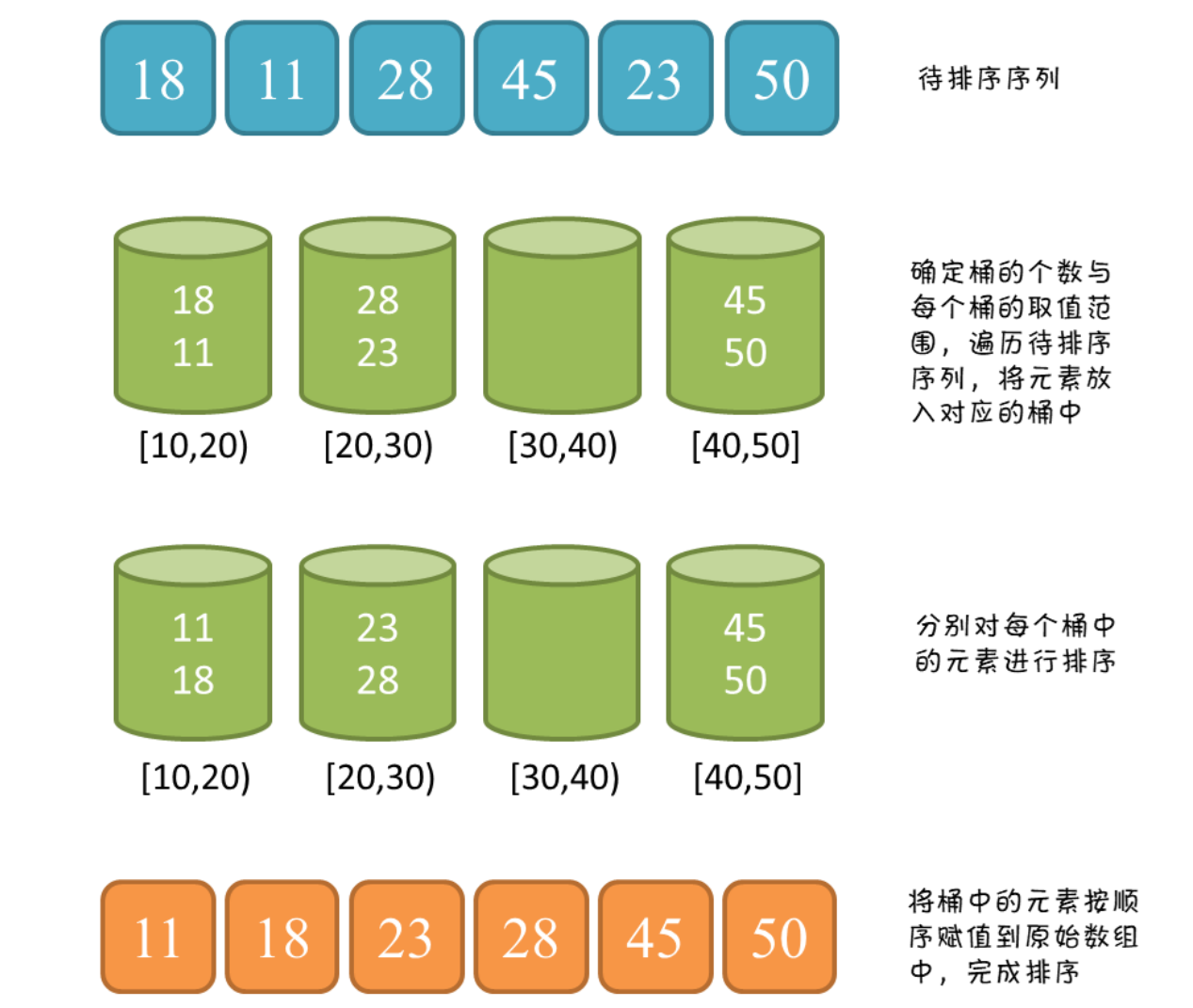
15.2、桶排序
算法思想:劃分多個范圍相同的區間,每個子區間自排序,最后合并
計數排序、基數排序、桶排序 都是非基于比較的排序




)






)




——3.4指令類型)


