引言: 從協作機械臂到人形機器人,一文拆解主流總線技術選型困局
在機器人技術飛速發展的今天,從工廠流水線上的協作機械臂到科技展會上的人形機器人,它們的“神經系統”——通訊總線,正面臨著前所未有的挑戰。特斯拉Optimus的精準動作、波士頓動力Atlas的流暢跑跳,背后都是海量數據的高速交互。
然而,許多工程師在項目初期都會陷入同一個困境:面對RS485、CAN/CAN FD、EtherCAT等多種總線方案,究竟該如何選擇? 本文將從機器人類型與需求分析出發,深入剖析三大主流總線技術的優劣,不提供“標準答案”,只提供一套科學的選擇方法論。
一、機器人類型與通訊需求拆解
不同機器人的自由度、運動復雜度和性能要求,直接決定了其通訊總線的選擇方向。下圖概括了三種典型機器人的通訊需求與方案選擇:
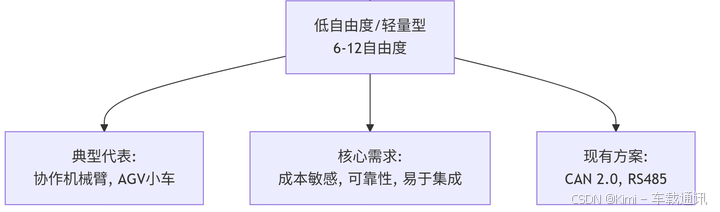
1. 低自由度/輕量型機器人(6-12自由度)
典型代表:協作機械臂、AGV小車、桌面級教育機器人。
核心需求:成本敏感、可靠性、易于集成、適度實時性(毫秒級)。這類機器人節點數相對較少,數據量不大,但對性價比要求極高。
現有主流方案:CAN 2.0, RS485。

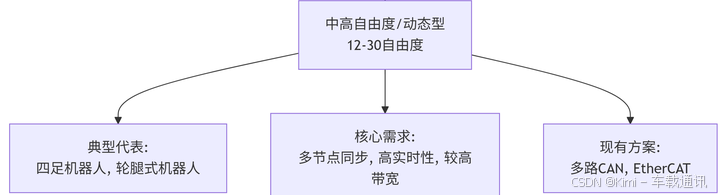
2. 中高自由度/動態型機器人(12-30自由度)
典型代表:四足機器人、輪腿式機器人、高性能機械臂。
核心需求:多節點同步、高實時性(微秒級抖動)、較高帶寬、抗干擾能力。例如,四足機器人的12個關節需要實時協調運動以保持平衡,任何指令延遲或抖動都可能導致步態失穩甚至摔倒。
現有主流方案:多路CAN、EtherCAT。

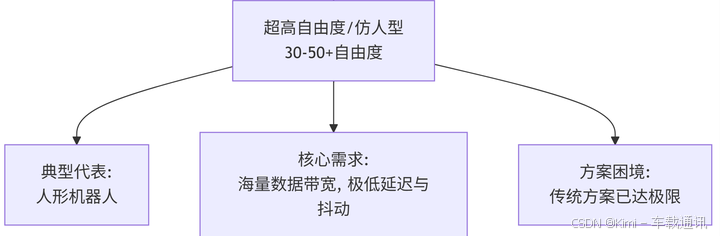
3. 超高自由度/仿人型機器人(30-50+自由度)
典型代表:人形機器人。
核心需求:海量數據帶寬、極低延遲與抖動、多總線并行管理能力、極高的可靠性。例如,控制50個自由度的機器人以1kHz頻率運行,理論上每秒需處理5萬條控制指令+5萬條反饋數據,對總線帶寬和實時性是極致考驗。
現有方案困境:傳統單一路CAN或RS485已完全無法滿足需求,EtherCAT成本高昂,系統架構設計復雜。

二、三大主流總線技術深度橫評

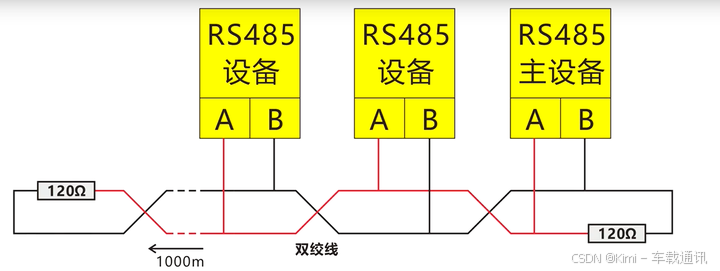
1. RS485(及“高速”變種):經濟的入門選擇
RS485本質上是一種電氣標準,常與Modbus等應用層協議搭配使用。
優勢:
- 極低的硬件成本:收發器芯片成本僅為CAN方案的1/3左右。
- 接口簡單,傳輸距離長(可達1.5km)。
- 軟件棧簡單,開發門檻低。
缺陷與挑戰:
- 無硬件仲裁機制:采用主從輪詢方式,節點增加時,輪詢延遲呈線性增長(20節點延遲超50ms),實時性極差,無法支持多節點同步控制。
- 無硬件錯誤幀處理:可靠性高度依賴應用層協議,增加了軟件復雜性和CPU開銷。
- “高速”的代價:波特率提升后(>1Mbps),信號完整性問題突出,布線要求苛刻,工程調試難度大,電磁兼容性(EMC)表現較差(誤碼率比CAN高1-2數量級)。
典型應用:對實時性要求不高的傳感器采集、低速IO控制、成本極度敏感的場景。
案例:宇樹科技早期四足機器人 盡管業界對宇樹采用RS485有過熱議,但其在低成本、低自由度(如Unitree Go1) 機器狗上的成功,恰恰印證了RS485在滿足特定成本約束和基本功能需求下的可行性。這更多是一種在成本、功耗、開發周期與性能之間取得的工程平衡,而非技術上的最優解。
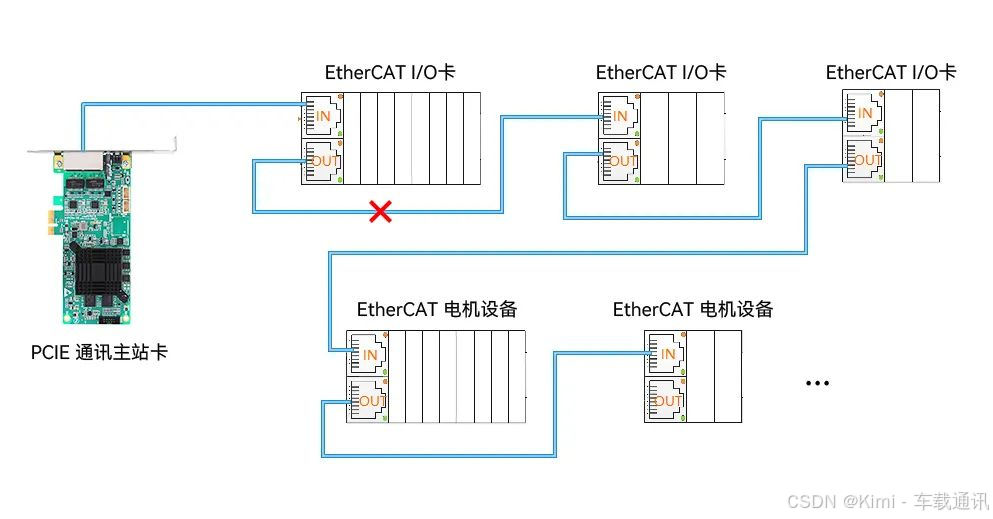
2. EtherCAT:高性能的終極方案、一斷全斷恐成可靠性瓶頸
EtherCAT是一種基于以太網的實時工業以太網協議,以其卓越性能著稱。
優勢:
- 極高的性能和確定性:采用”Processing on the the Fly”(數據幀在傳輸中實時處理)技術,從站設備在數據幀通過時直接讀取/寫入數據,無需等待完整接收;同步精度可達 μs(百納秒級),1000個從站的通信周期可短至100μs。
- 高效率帶寬利用率:單一以太網幀可攜帶多個從站數據(幀復用),理論上支持大量節點;相比傳統Modbus TCP,帶寬利用率提升 90%+。
- 靈活的拓撲結構:支持線型、樹型、星型混合拓撲(無需交換機),布線成本低。
- 硬件成本優化:從站設備只需低成本ESC芯片(如Beckhoff ET1100),主站可通過標準網卡(需實時驅動)實現。
缺陷與挑戰:
- “一斷全斷”風險:在線型拓撲中,單一從站故障可能導致整網癱瘓,需復雜的冗余設計來緩解。
- 主站開發復雜度高:需實現精確的DC(分布式時鐘)同步算法,對主站CPU實時性要求嚴苛(通常需Xenomai/RT-Linux)。
- 故障診斷難度大:缺乏標準化的網絡流量分析工具。
- 硬件依賴性:從站必須使用專用ESC芯片,無法通過軟件模擬;主站網卡需支持IEEE 1588硬件時間戳。
- 生態系統局限:主要依賴德國廠商(Beckhoff、倍福),亞洲地區技術支持較弱。
典型應用:對同步性和實時性要求極端的場景,如多軸伺服同步(CNC/機器人)、高速分布式IO控制。
3. CAN/CAN FD:平衡之選與升級之路
CAN總線以其高可靠性著稱,而CAN FD是其面向更高帶寬需求的升級版本。
CAN 2.0:成熟的平衡之選
- 優勢:完美的平衡性。成本低于EtherCAT,可靠性高(硬件CRC校驗、無損仲裁機制),軟硬件生態極其成熟,開發資源豐富。
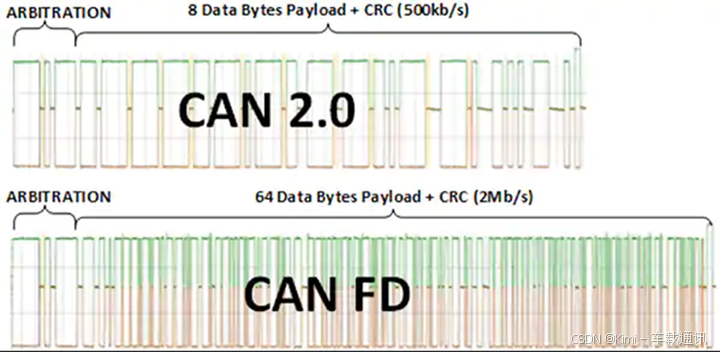
- 缺陷:帶寬天花板(1Mbps, 8字節) 是硬傷,限制了其在現代高自由度機器人中的應用。
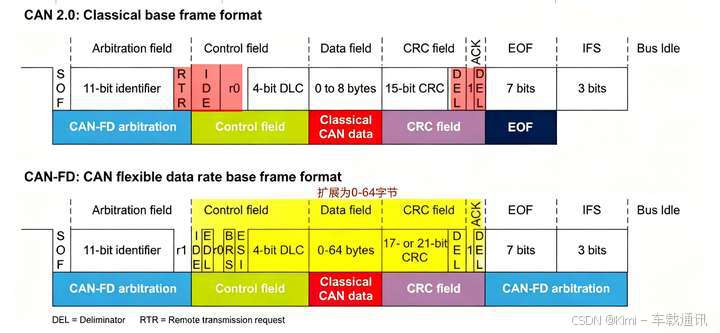
CAN FD:突破帶寬限制的升級之路
優勢:
- 繼承了CAN 2.0的所有優點(可靠性、生態、成本)。
- 突破帶寬限制:數據段速率最高可達12Mbps+,數據長度最多64字節。
- 平滑升級路徑:便于從現有CAN 2.0項目遷移。
現階段應用難點與挑戰:
- 波特率配置復雜性:數據段波特率、采樣點等參數需要根據網絡拓撲精細調優,否則通訊穩定性差。
- 對硬件依賴性增強:高速率對收發器性能、PCB布局布線、電纜質量提出了更高要求。
- 協議設計新挑戰:如何利用64字節幀設計高效協議(如打包多電機指令)以最大化帶寬效益,需要新的設計思路。
- 多通道擴展需求:主板原生CAN FD接口稀少,如何擴展出穩定、多路、高性能的CAN FD通道是一個系統工程問題。(例如,NXP的MR-CANHUBK344評估板集成了6個CAN FD端口,為移動機器人應用提供了參考設計)
4. 單對雙絞線車載以太網在機器人行業的潛在應用前景
在機器人通訊技術快速發展的背景下,基于單對雙絞線的車載以太網(如IEEE 802.3bw/bp/ch等標準)正展現出巨大的應用潛力。這種技術融合了傳統以太網的高帶寬和車載環境要求的可靠性,為下一代機器人系統提供了新的選擇。
核心優勢:
- 帶寬與實時性兼備:提供10Mbps至1Gbps的傳輸速率(10BASE-T1S、100BASE-T1、1000BASE-T1),同時支持時間敏感網絡(TSN)協議,可滿足高精度同步控制需求
- 布線簡化:單對雙絞線結構顯著減輕線束重量和體積,非常適合空間受限的機器人應用
- 成本效益:相比傳統多對線纜以太網,大幅降低布線成本和復雜度
- 協議統一:基于IP的架構便于與云端、邊緣計算和其他智能設備集成
應用場景:
- 人形機器人主干網絡:可作為中央控制器與各子系統間的高速數據 backbone
- 多傳感器融合:同時傳輸高清視覺、3D點云、雷達等多模態傳感器數據
- 分布式計算架構:連接多個計算單元(如GPU、NPU),實現算力協同
三、總結與展望
下表總結了三種總線技術在關鍵特性上的定位:
| 特性維度 | RS485 | CAN/CAN FD | EtherCAT |
| 單節點成本 | 極低 | 中等 | 高 |
| 系統實時性 | 差(毫秒級) | 好(微秒級) | 極優(亞微秒級) |
| 帶寬能力 | 低(依賴波特率) | 中(CAN FD大幅提升) | 高 |
| 可靠性機制 | 弱(依賴軟件) | 強(硬件錯誤處理、多主仲裁) | 強(但拓撲影響大) |
| 開發難度 | 低 | 中 | 高 |
| 拓撲靈活性 | 總線型/星型 | 總線型 | 線型、星型、樹型 |
| 典型應用場景 | 低速IO、傳感器 | 車載網絡、中低自由度機器人 | 多軸伺服同步、高端運動控制 |
核心觀點:不存在“唯一最優解”,只有“最適合的方案”。
- RS485是經濟的入門選擇,適用于對實時性要求不嚴苛、節點數少、成本極度敏感的場景。
- EtherCAT是高性能的終極方案,適用于對同步性和實時性有極致要求、預算充足、技術實力雄厚的項目。
- CAN FD則是在成本、性能和生態之間取得了最佳平衡點的“升級之路”。它極具潛力成為下一代主流機器人通訊 backbone,但其高速應用仍面臨上述需要克服的工程挑戰。

預告:那么,如果我們選擇了CAN FD這條極具潛力的道路,究竟該如何根據機器人的自由度來具體規劃總線架構、計算通訊負載、并解決前文提到的工程挑戰呢? 我們將在下一篇文章《規劃機器人的CAN FD神經網絡:從架構設計到負載計算》中詳細探討。
討論與思考
- 在您的機器人項目中,最終選擇了哪種通訊總線?促使您做出這個決定的關鍵因素是什么?(是成本、性能、還是開發便利性?)
- 您是否評估過從CAN 2.0升級到CAN FD?過程中遇到的最大障礙是什么?(是硬件成本、協議重新設計、還是穩定性調優?)
- 對于EtherCAT的“一斷全斷”風險,您在系統設計中有哪些有效的冗余或容錯策略?
歡迎在評論區分享您的真知灼見和實踐經驗!
參考資料與數據來源
- 宇樹a1,8010電機自研RS485驅動
- EtherCAT 的優點與缺點
- NXP S32K344:移動機器人評估板,具有100BASE-T1接口和6個CAN FD端口
- NXP Semiconductors 用于移動機器人的MR-CANHUBK344評估板
- “毫秒級”時延!聯通5G一體機開啟工業與機器人“數智變革”
- 為什么宇樹科技的電機通信使用RS485
以上內容僅供參考,實際選型需根據具體項目需求、技術團隊能力和預算等因素綜合決策。
)


)







)



)
---持續更新 四(91-))


