Halcon 和?OpenCV區別
Halcon 和 OpenCV 都是計算機視覺領域的重要工具,但它們的設計理念、功能側重和適用場景有顯著不同。下面這個表格匯總了它們的核心區別,方便你快速了解:

- 開發模式與體驗??:Halcon 配備了強大的??圖形化交互開發環境 HDevelop??。你可以通過可視化方式快速調試算法、驗證思路,極大提升了開發效率,尤其適合算法原型設計。OpenCV 則更傳統,需要你??編寫代碼??來實現所有功能,靈活性更高,但開發驗證流程相對繁瑣。
- 性能與優化??:Halcon 的算法針對工業應用進行了??深度優化??,尤其在處理高分辨率圖像、復雜匹配和3D視覺任務時,其??速度和精度優勢明顯??。OpenCV 作為通用庫,其性能在很大程度上依賴于用戶的編程技巧和對算法的理解,你可能需要花費額外精力進行優化和硬件加速(如利用CUDA)才能滿足特定性能要求。
- 生態與社區??:OpenCV 擁有??極其活躍的全球開源社區??,這意味著你可以輕松找到海量的教程、代碼示例和論壇討論,遇到問題時更容易獲得幫助。Halcon 作為商業軟件,社區規模較小,但其??官方提供的技術支持、技術文檔和培訓服務??非常專業和可靠
-
選擇 Halcon 的情況??:
- 項目要求高??精度??、高??速度??和高??可靠性??,例如工業生產線上的自動化質檢、精密尺寸測量、機器人視覺引導等。
- 項目??預算充足??,且愿意為成熟的官方技術支持、穩定的性能和完善的工具體系付費。
- 團隊更傾向于??快速開發??和部署復雜的機器視覺應用。
- 選擇 OpenCV 的情況??:
- 項目??預算有限??或需要開源方案。
- 應用于??學術研究??、??算法學習??或需要高度??自定義修改??算法。
- 開發場景??多樣化??,涉及移動端(Android/iOS)、嵌入式設備(如樹莓派)或Web端等。
- 團隊有較強的??編程能力??,愿意投入時間進行算法優化和調試。
VisionPro 和 Visual Master區別
VisionPro??:工業視覺的“精密儀器”,適合??技術深厚+高預算??團隊,長期維護成本低但學習門檻高。
??VisionMaster??:國產化“敏捷工具”,??降低工程師技能要求??,適合快速響應項目,但復雜任務需結合OpenCV等二次開發
VisionPro是Cognex公司開發的機器視覺軟件,而VisionMaster是海康機器人開發的國產機器視覺軟件
熟悉VisionPro的基本概念和界面操作,接著學習使用各種視覺工具如Blob分析、邊緣檢測等,最后進階到編程和系統集成。VisionPro需要學習C#或C++等編程語言以進行API交互
VisionMaster,提到它采用圖形化流程圖開發方式,學習曲線較平緩。用戶需要掌握其界面操作、工具鏈使用(如測量、定位、識別等),以及如何快速部署視覺應用。雖然也支持腳本擴展,但編程要求低于VisionPro。
VisionPro功能強大,適合高精度工業場景,但學習曲線陡峭且成本高;VisionMaster則易于上手,適合快速部署中等復雜度任務,成本較低。在性能上,VisionPro處理復雜任務效率更高,支持3D視覺和高速檢測;VisionMaster在常規任務中表現良好但處理能力有限。
VisionPro需要深入理解多視圖幾何、相機模型等理論,而VisionMaster更側重應用層面的流程設計。
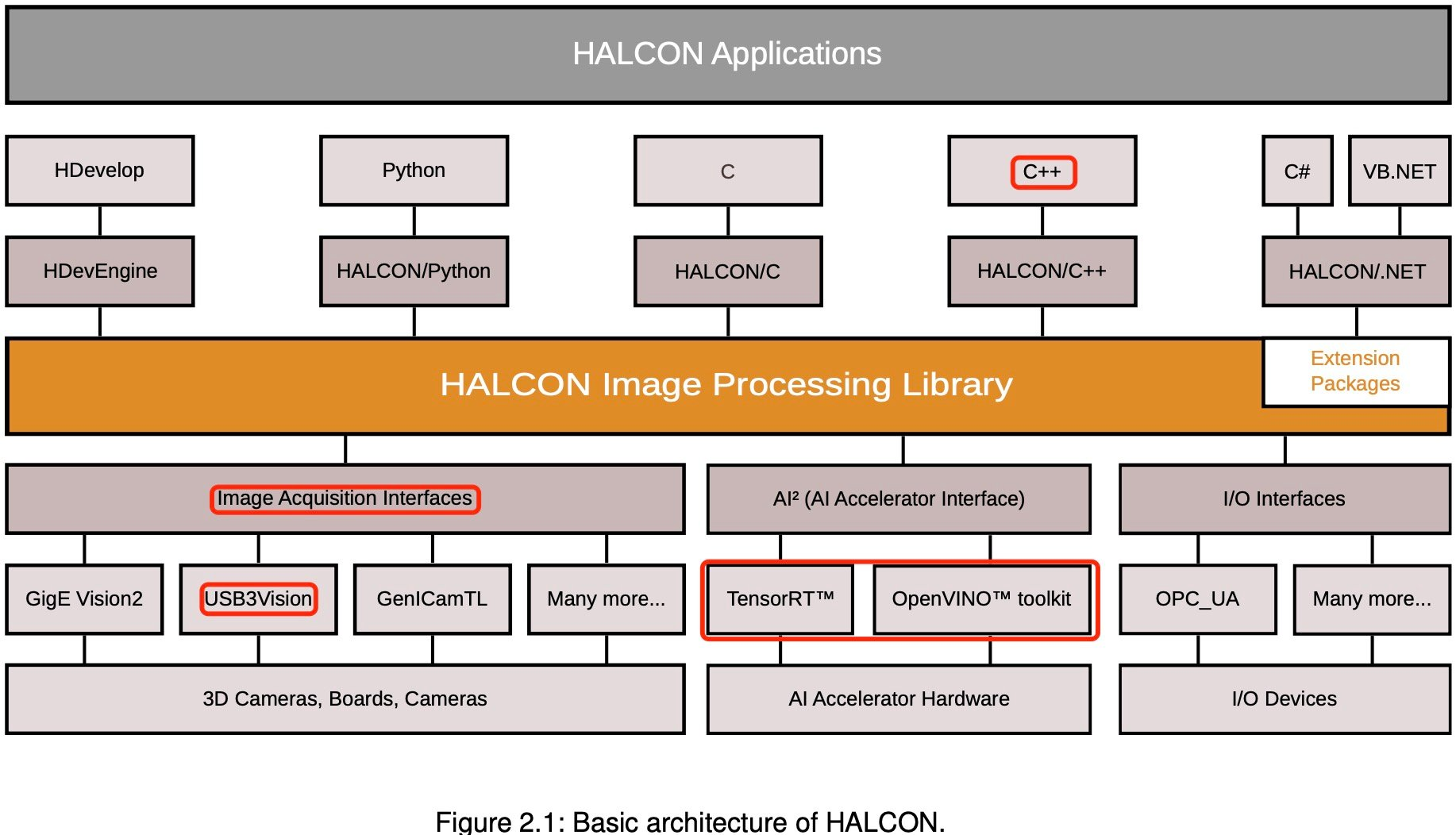
Halcon的官方文檔是學習Halcon的最佳資源之一。
HALCON - the powerful Machine Vision Software: MVTec Software
文檔中詳細介紹了Halcon的各種功能和用法,包括圖像處理、形態學計算分析、校正、分類辨識、形狀搜尋等基本的幾何以及影像計算功能。
?1.halcon學習路線
??Halcon算法基礎?? -> ??C#語言與UI開發?? -> ??軟硬件聯合編程?? -> ??最終項目方案設計?
halcon安裝
安裝教程網上太多了,這里附上鏈接
安裝鏈接:Halcon2024版安裝教程附帶license(2025.04)更新_halcon license-CSDN博客
license下載地址:license的github地址
參考:Halcon學習路線-CSDN博客
| 技術主題 | 具體知識點 |
|---|---|
| halcon | hdevelop使用、通用流程、數據類型和異常處理、采集圖像 |
| 圖像與ROI、圖像預處理 | |
| blob(流程、分割方法、灰度直方圖工具、特征直方圖工具、blob實例) | |
| 幾何定位(匹配助手、幾何定位實例) | |
| 仿射變換(仿射變換理論、實例) | |
| 測量(卡尺工具的過程、一維助手、找圓和找直線工具) | |
| 案例分析 | blob、定位、測量、仿射變換、一維碼、二維碼、OCR |
| C# | 常量與變量、表達式與運算符、字符與字符串、流程控制語句 |
| 數組、屬性和方法、結構與類、異常處理、程序調試 | |
| Form窗體、常用控件、定時器、獲取時間、文件夾操作(獲取exe路徑、創建新文件夾等) | |
| 寫CSV文件、線程 | |
| 聯合編程 | 環境配置、數據類型、halcon程序導出成ot程序、聯合編程示例之Blob |
| 聯合編程示例之相機采圖(外觸發和軟觸發)、輪廓匹配、測量、配置文件讀寫 | |
| 硬件 | 硬件及打光實踐 |
| 九點標定 | 串口、網口、機械手和相機九點標定 |
| 外觸發及方案設計 | 外觸發關鍵技術、如何根據客戶需求進行方案設計 |
📖 一、Halcon 學習路線?
??第一階段:Halcon 基礎與核心算法 (路線圖中的“Halcon”部分)??
這是整個學習的基石,目標是熟練掌握HDevelop并理解機器視覺的核心處理流程。學習內容??:安裝配置(Windows/Linux)、HDevelop界面操作、圖像采集與顯示、基礎算子(濾波、邊緣檢測)。??資源??:《Halcon入門教程v1.9》、官方示例庫。?模板匹配(形狀/特征匹配)、測量工具(亞像素級精度)、OCR/條碼識別、Blob分析。資源??:Halcon范例教程(CSDN文庫)。?
-
??開發環境與基礎:
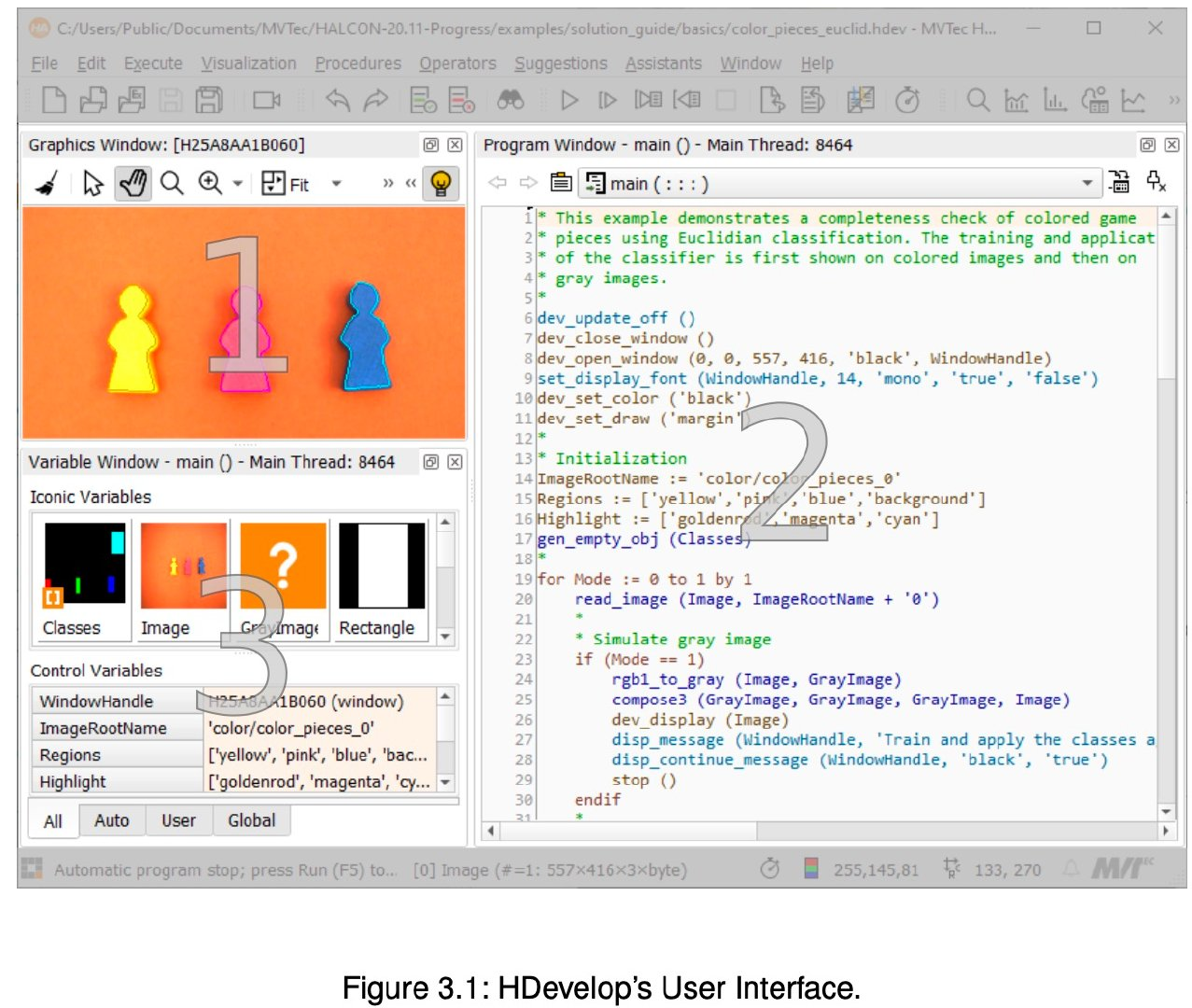
- 熟悉 ??HDevelop?? 的界面、腳本編輯、變量管理、程序調試。
重點掌握: * 圖像采集(read_image, grab_image) * 區域處理(threshold, connection, select_shape) * 模板匹配(create_shape_model, find_shape_model) * 測量(measure_pos, measure_pairs) - 掌握Halcon的??通用流程??:圖像采集 -> 圖像預處理 -> 區域/特征提取 -> 結果判斷與輸出。
用Halcon實現經典算法: Canny邊緣檢測(edges_image) 形態學開閉運算(opening_circle, closing_rectangle1) 仿射變換(hom_mat2d_rotate, affine_trans_image) - 理解Halcon特有的??數據類型??:
HImage(圖像),HRegion(區域),HXLD(輪廓)等,以及它們之間的轉換。學
- 熟悉 ??HDevelop?? 的界面、腳本編輯、變量管理、程序調試。
-
??圖像處理與分析:?
- ??圖像預處理??:學習各種濾波(均值、中值、高斯)、圖像增強等,為后續分析準備高質量的圖像。
- ??Blob分析(區域分析)??:這是最核心的技術之一。
* 頻域分析(fft_image+濾波) * Blob分析(select_shape篩選缺陷區域) * 分類器(MLP或SVM區分真假缺陷) 關鍵技巧:使用gen_contour_region_xld提取亞像素輪廓提升精度- ??流程??:圖像分割(閾值分割、動態閾值等) -> 區域處理(形態學、連接、選擇) -> 特征提取(面積、中心、圓度等) -> 特征選擇。
- 熟練使用 ??灰度直方圖工具?? 和 ??特征直方圖工具?? 來輔助分析和選擇區域。
-
??幾何定位(Pattern Matching):??
- 學習使用 ??匹配助手(Matching Assistant)??。這是Halcon的王牌功能,用于在圖像中精確找到目標物體。
- 掌握基于形狀的匹配(Shape-Based Matching)的原理和參數調節(金字塔級別、角度范圍、對比度等)。
- 通過實例學習如何解決遮擋、臟污、亮度變化等實際問題。
-
??測量與擬合:??
- ??仿射變換??:理解其原理(平移、旋轉、縮放),學會將像素坐標轉換到世界坐標(機器人坐標),這是??九點標定??的理論基礎。
- ??測量技術??:
- 掌握 ??卡尺工具(Caliper)?? 的工作過程,用于邊緣精準定位。
- 學習使用 ??一維測量助手(1D Measuring Assistant)??。
- 實踐??找圓??和??找直線??的工具。
-
??綜合案例與識別:??
- 將前面所學融會貫通,完成Blob、定位、測量、仿射變換的綜合案例。
- 學習??一維碼??、??二維碼??的識別。
- 了解??OCR(光學字符識別)?? 的基本流程。
3D定位 雙目相機標定(calibrate_cameras) 點云處理(xyz_to_object_model_3d) 3D匹配(find_surface_model)高速OCR 字符分割(partition_dynamic) 深度學習OCR(read_ocr_class_mlp) 實時性(通過ROI減少處理區域)
??第二階段:編程語言與聯合開發 (路線圖中的“C#”和“聯合編程”部分)??
工業應用通常需要強大的上層界面,C#(或C++)是首選。學習內容??:
3D視覺:點云處理(配準、分割)、3D匹配(基于CAD模型)。
深度學習:目標檢測(YOLO集成)、缺陷分類(需準備.hdict數據集)。
腳本編程:Halcon腳本語法、C++/Python API集成。
-
??C# 編程基礎:??
- 掌握變量、流程控制、數組、字符串、類與對象等核心語法。
- 重點學習??窗體(Form)開發??、常用控件(按鈕、圖片框、列表框等)、??定時器??、??文件操作??和??多線程??。這些是開發視覺軟件界面的基礎。
-
??Halcon 與 C# 聯合編程:??
- ??環境配置??:在Visual Studio中配置Halcon的.NET開發環境,添加引用。
- ??數據交互??:學會在C#中調用Halcon算子,并正確處理Halcon的數據類型(如將
HImage轉換為C#圖片控件可顯示的格式)。 - ??程序導出??:將HDevelop中調試好的程序??導出為C#代碼(.cs文件)或導出為.NET程序集(.hdpl文件)??,然后在C#項目中調用。這是提升開發效率的關鍵!
- ??實戰演練??:在C#中實現相機采圖(軟觸發、外觸發)、輪廓匹配、測量、參數保存(配置文件讀寫)等功能。
??第三階段:硬件集成與項目實戰 (路線圖中的“硬件”、“九點標定”、“外觸發”)??
這是從“會編程”到“能做項目”的關鍵飛躍。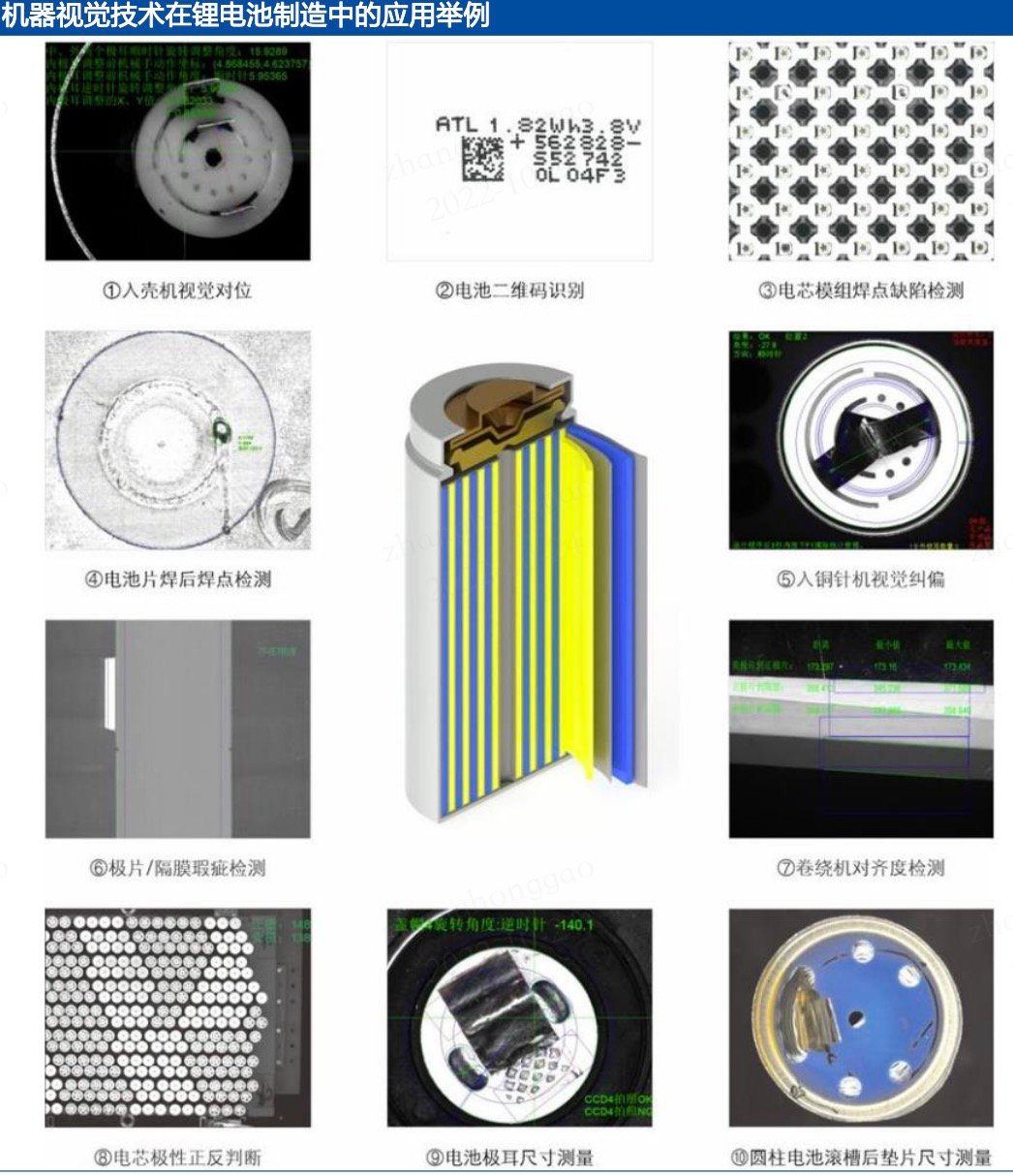
-
??視覺硬件選型與打光:??
- 了解相機(面陣、線陣)、鏡頭(焦距、景深)、光源(環形光、條形光、背光、同軸光)的選型原則。
- ??“打光實踐”至關重要??!好的打光能讓算法事半功倍。多動手,嘗試不同的打光方式來解決實際問題。
-
??九點標定(手眼標定):??
- 這是機器人視覺引導的核心技術。
- 理解標定原理:建立??圖像像素坐標系??與??機器人坐標系??之間的映射關系。
- 學習通過??串口??或??網口??與機械手通信,完成九點標定的完整流程。
-
??外觸發與方案設計:??
- 學習??外觸發??技術,使相機拍照與生產線運動同步,確保圖像采集的準確性。
- ??方案設計??:學習如何分析客戶需求,將需求拆解為技術指標(精度、節拍),并據此選擇相機、鏡頭、光源、算法流程,最終形成可行的技術方案。
第四階段:工業強化
-
硬件集成
- 學習與PLC通信(如通過TCP/IP發送檢測結果)
- 相機SDK二次開發(如Basler的Pylon API)
-
性能優化?
- Halcon算子級優化:
- 使用
tuple替代循環 - 預編譯模型(
write_shape_model加速加載)
- 使用
- 多線程處理(
par_start并行化)
- Halcon算子級優化:
-
行業專項突破?
- 半導體:晶圓缺陷檢測(暗場照明+高分辨率相機)
- 汽車:零件尺寸測量(微米級精度要求)
- 食品:包裝完整性檢測(多光譜成像)
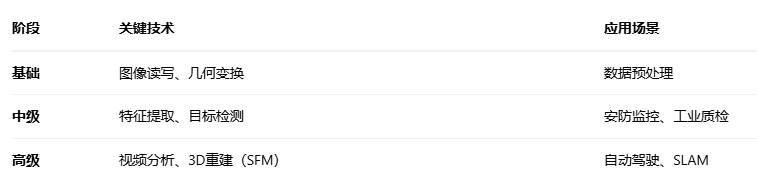
💡 二、學習建議與資源
- ??學習順序??:嚴格按照路線圖的順序進行,??不要跳級??。先精通Halcon本身,再學C#,最后搞聯合編程和硬件。地基不牢,地動山搖。
- ??核心方法??:??多動手!多動手!多動手!?? 光看文檔和視頻是學不會的。對于每個知識點,都要在HDevelop里親自寫代碼、調參數、看效果。
- ??最佳資料??:
- ??Halcon自帶的幫助文檔和示例程序??:這是最權威、最好的學習資料,按F1查看算子說明,里面的示例代碼極其寶貴。?HALCON 產品文件和手冊: MVTec Software
- ??書籍??:《機器視覺算法與應用(雙語版)》、《Halcon機器視覺算法原理與編程實戰》。
- ??社區??:CSDN(Halcon 快速入門教程_halcon教程-CSDN博客)、博客園(halcon進化日記-方法論:階段1:基礎攻堅(1~2個月) - 黛色星霜 - 博客園)、知乎上有大量經驗分享和問題解答。
2.OpenCV學習路線
-
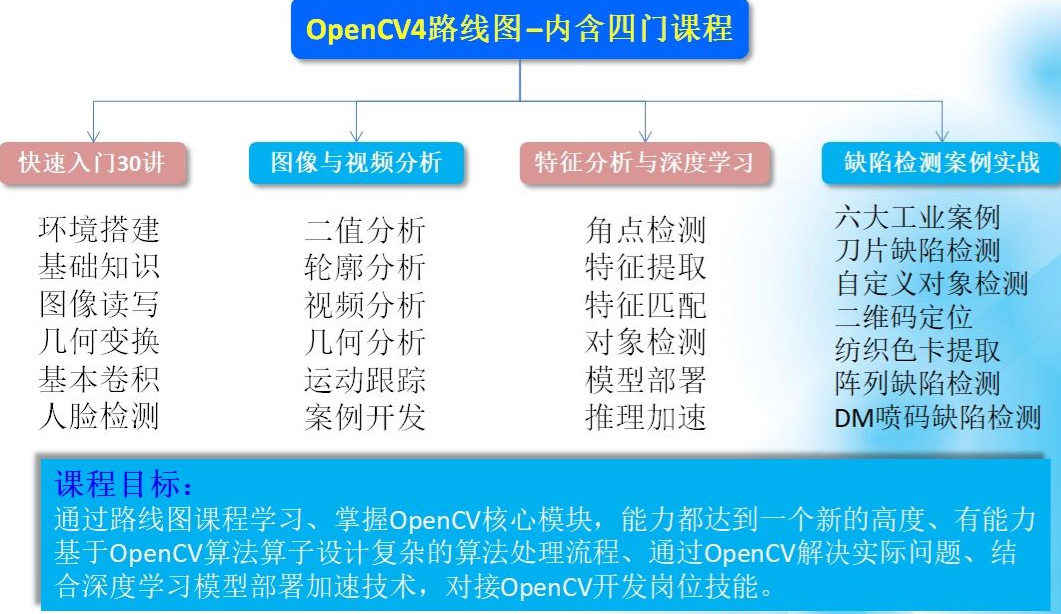
OpenCV開發基礎
掌握圖象與視頻讀寫,基礎函數知識,HighGUI與Core模塊像素操作,圖形操作,圖象統計信息與直方圖相關應用。 -
圖象卷積
理解圖象卷積概念與相關函數知識,掌握常見的模糊、銳化、增強、去噪、梯度等卷積操作 -
二值圖象分析
掌握圖象二值化各種方法與技巧,學會CCL,輪廓發現,對象測量,輪廓分析,直線與圓檢測等二值分析方法,掌握圖象形態學應用操作技巧 -
視頻分析
掌握圖象色彩空間轉化技巧,視頻背景提取、角點特征與光流分析法、理解顏色對象跟蹤、光流跟蹤、均值遷移跟蹤等算法原理與代碼演示 -
特征提取
掌握圖象特征提取的基本方法與相關函數知識,理解ORB特征描述子、SIFT特征描述子提取原理,圖象透視變換與特征匹配基本原理與應用演示 -
深度神經網絡
掌握OpenCV DNN模塊基于深度神經網絡的對象檢測模型的推理調用與輸出解析,包括SSD、YOLOv5、YOLOv8、對象檢測模型的使用與加速技巧。 -
經典案例實戰
星云測量與編碼、工業刀片缺陷檢測、自定義對象檢測、二維碼定位檢測 圖像分割與色彩提取、文檔處理與對齊、圖象對齊與拼接、條碼標簽有無檢測與定位
 ??
??
??第1周:計算機視覺與OpenCV基礎??
1.1 計算機視覺是OpenCV的核心應用領域,計算機視覺應用場景概述(工業檢測、自動駕駛、醫療成像等),因此需要一定的計算機視覺基礎。以下幾門課程是必不可少的:
圖像處理:了解圖像的基本操作,如裁剪、旋轉、縮放等。
特征提取:學習如何從圖像中提取有用的特征,如邊緣檢測、角點檢測等。
深度學習基礎:了解神經網絡的基本概念,特別是卷積神經網絡(CNN)。
1.2? OpenCV 發展歷程、跨平臺特性(Windows/Linux/macOS)
安裝配置:Python 版?pip install opencv-python?/ C++ 環境配置
核心數據結構:cv::Mat?矩陣操作、圖像內存管理
1.3?安裝OpenCV:根據自己的操作系統,選擇合適的安裝方法。可以使用pip安裝: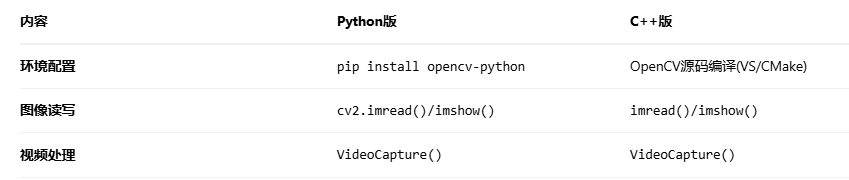
pip install opencv-python// 測試安裝:運行以下代碼,確保OpenCV安裝成功:
import cv2
print(cv2.__version__)參考:OpenCV: OpenCV-Python Tutorials
??第2周:OpenCV 圖像操作(參考:OpenCV學習路線:從入門到精通-CSDN博客)
2.1 圖像讀取與顯示
-
讀取圖像:使用
cv2.imread()讀取圖像。 -
顯示圖像:使用
cv2.imshow()顯示圖像。 -
保存圖像:使用
cv2.imwrite()保存圖像。import cv2# 讀取圖像 image = cv2.imread('example.jpg')# 顯示圖像 cv2.imshow('Image', image) cv2.waitKey(0) cv2.destroyAllWindows()# 保存圖像 cv2.imwrite('output.jpg', image)2.2 視頻處理
-
讀取視頻:使用
cv2.VideoCapture()讀取視頻。 -
顯示視頻:使用
cv2.imshow()顯示視頻幀。 -
保存視頻:使用
cv2.VideoWriter()保存視頻。
import cv2# 讀取視頻
cap = cv2.VideoCapture('example.mp4')# 保存視頻
fourcc = cv2.VideoWriter_fourcc(*'XVID')
out = cv2.VideoWriter('output.avi', fourcc, 20.0, (640, 480))while cap.isOpened():ret, frame = cap.read()if not ret:break# 顯示視頻幀cv2.imshow('Frame', frame)# 保存視頻幀out.write(frame)if cv2.waitKey(1) & 0xFF == ord('q'):breakcap.release()
out.release()
cv2.destroyAllWindows()2.3 圖像基本操作?幾何變換:縮放(resize)、旋轉(warpAffine)、仿射變換(getAffineTransform)
-
裁剪圖像:使用數組切片操作。
-
旋轉圖像:使用
cv2.getRotationMatrix2D()和cv2.warpAffine()。 -
縮放圖像:使用
cv2.resize()。 -
import cv2# 讀取圖像 image = cv2.imread('example.jpg')# 裁剪圖像 cropped_image = image[100:300, 200:400]# 旋轉圖像 center = (image.shape[1] // 2, image.shape[0] // 2) angle = 45 scale = 1.0 M = cv2.getRotationMatrix2D(center, angle, scale) rotated_image = cv2.warpAffine(image, M, (image.shape[1], image.shape[0]))# 縮放圖像 resized_image = cv2.resize(image, (300, 300))# 顯示圖像 cv2.imshow('Cropped Image', cropped_image) cv2.imshow('Rotated Image', rotated_image) cv2.imshow('Resized Image', resized_image) cv2.waitKey(0)2.4 邊緣檢測
-
Canny邊緣檢測:使用
cv2.Canny()進行邊緣檢測。import cv2# 讀取圖像 image = cv2.imread('example.jpg', cv2.IMREAD_GRAYSCALE)# Canny邊緣檢測 edges = cv2.Canny(image, 100, 200)# 顯示邊緣檢測結果 cv2.imshow('Edges', edges) cv2.waitKey(0)2.5?特征提取

-
角點檢測:使用
cv2.goodFeaturesToTrack()進行角點檢測。 -
SIFT和SURF:使用
cv2.SIFT_create()和cv2.xfeatures2d.SURF_create()進行特征提取。
import cv2# 讀取圖像
image = cv2.imread('example.jpg', cv2.IMREAD_GRAYSCALE)# 角點檢測
corners = cv2.goodFeaturesToTrack(image, 25, 0.01, 10)
corners = np.int0(corners)for i in corners:x, y = i.ravel()cv2.circle(image, (x, y), 3, 255, -1)# 顯示角點檢測結果
cv2.imshow('Corners', image)
cv2.waitKey(0)
cv2.destroyAllWindows()# SIFT特征提取
sift = cv2.SIFT_create()
keypoints, descriptors = sift.detectAndCompute(image, None)# 顯示SIFT特征提取結果
image_with_keypoints = cv2.drawKeypoints(image, keypoints, None)
cv2.imshow('SIFT Keypoints', image_with_keypoints)
cv2.waitKey(0)
cv2.destroyAllWindows()像素級操作:BGR/RGB 色彩空間轉換、ROI 區域截取
??第3周:圖像處理技術??
閾值分割:二值化(threshold)、自適應閾值(adaptiveThreshold)
濾波降噪:均值模糊(blur)、高斯模糊(GaussianBlur)、中值濾波(medianBlur)
邊緣檢測:Sobel算子、Laplacian算子
形態學操作:腐蝕(erode)、膨脹(dilate)、開閉運算
??第4周:特征檢測與描述??
角點檢測:Harris角點、Shi-Tomasi角點(goodFeaturesToTrack)
邊緣提取:Canny算法(重點掌握參數調節)
特征描述子:SIFT/SURF(專利算法)、ORB(實時替代方案)
??第5周:圖像分割與目標識別??
輪廓分析:findContours?輪廓檢測、層次結構解析
目標檢測:Haar級聯分類器(人臉檢測)、HOG + SVM(行人檢測)
實戰項目:簡單物體分類(如數字識別)
5.1 Haar特征級聯分類器
-
人臉檢測:使用預訓練的Haar特征級聯分類器進行人臉檢測。
import cv2# 加載預訓練的Haar特征級聯分類器
face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml')# 讀取圖像
image = cv2.imread('example.jpg')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 檢測人臉
faces = face_cascade.detectMultiScale(gray, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30))# 繪制檢測到的人臉
for (x, y, w, h) in faces:cv2.rectangle(image, (x, y), (x+w, y+h), (255, 0, 0), 2)# 顯示檢測結果
cv2.imshow('Faces', image)
cv2.waitKey(0)
cv2.destroyAllWindows() 5.2 HOG + SVM
-
行人檢測:使用HOG特征和SVM分類器進行行人檢測。
import cv2 import numpy as np# 加載預訓練的HOG描述符 hog = cv2.HOGDescriptor() hog.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())# 讀取圖像 image = cv2.imread('example.jpg')# 檢測行人 regions, _ = hog.detectMultiScale(image, winStride=(4, 4), padding=(4, 4), scale=1.05)# 繪制檢測到的行人 for (x, y, w, h) in regions:cv2.rectangle(image, (x, y), (x+w, y+h), (0, 255, 0), 2)# 顯示檢測結果 cv2.imshow('Pedest')
??第6周:視頻分析與動態處理??
?
視頻流處理:VideoCapture?讀寫視頻幀
運動檢測:幀差法、背景減除(createBackgroundSubtractorMOG2)
光流法:稀疏光流(calcOpticalFlowPyrLK)、稠密光流(DualTVL1OpticalFlow)
??擴展學習建議??
1.工具鏈整合??
GitCode??:獲取開源項目代碼(如車道線檢測、AR應用)
?InsCodeAI??:使用AI輔助生成OpenCV代碼片段
2.??實戰資源推薦??
書籍??:
《OpenCV輕松入門:基于Python》- 李立宗著
《計算機視覺40例:從入門到深度學習》(含配套代碼)
免費教程??:OpenCV官方文檔(opencv.org)
3.??進階方向??
相機模型與標定:cv.calibrateCamera()?實現畸變校正
深度學習集成:YOLO、SSD與OpenCV的dnn模塊結合
GUI開發:Qt/PyQt 開發交互式視覺應用
3.VisionPro(美國Cognex)??
??定位??:高精度工業級解決方案,強于機器人引導和實時檢測。
??
階段1:圖形化基礎(1周)??
??學習內容??:QuickBuild環境搭建、相機標定、工具鏈拖拽(PatMax定位、Caliper測量)。
??
階段2:工具鏈精通(2-3周)??
??學習內容??:復雜參數調優(如旋轉容忍度)、結果調試(CogToolResult)、ViDi深度學習模塊(額外授權)。
??階段3:API開發(4-6周)??
??學習內容??:
C#/VB.NET編程:動態加載VPP文件、HMI界面開發(WinForms/WPF)。
系統集成:與PLC通信(EtherNet/IP)、機械臂手眼標定。
??
階段4:工業部署??
??案例??:汽車零件全檢(±0.02mm精度)、高速生產線實時處理(多線程優化)。
??
4. VisionMaster(中國海康)??
??定位??:國產化快速開發平臺,適合中小型項目快速落地。
??
階段1:零代碼入門(3-5天)??
??學習內容??:流程圖式編程、預置算法(定位/測量/OCR)、GUI參數配置。
??
階段2:模塊化應用(1-2周)??
??學習內容??:漢字OCR(>99.9%準確率)、條碼識別、基礎點云處理(限簡單場景)。
??
階段3:腳本擴展(選學)??
??學習內容??:Python腳本調用OpenCV、EtherCAT機器人通信。
??實戰場景??:物流分揀、包裝日期識別(1小時內部署)。
?? 二、核心維度對比

???










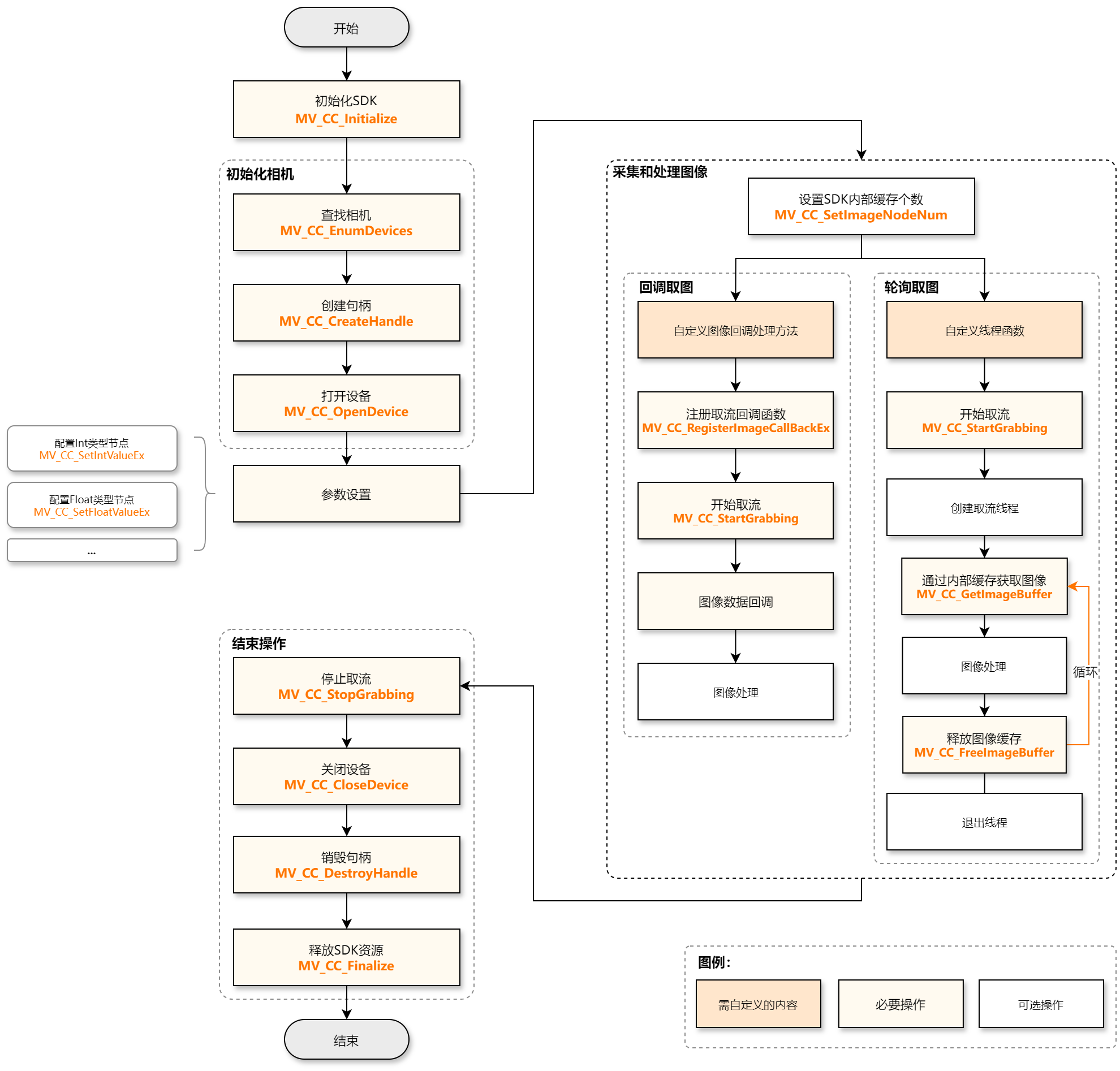
 函數用戶使用手冊)
)




)


詳解)