具身智能的“數據饑荒”:行業痛點與技術瓶頸的深度剖析
1.1 具身智能的現狀與核心挑戰
Embodied AI的落地之路面臨著多重嚴峻挑戰。在算法層面,實現通用智能仍需人類的持續介入,并且從感知到行動的認知映射尚未完全打通。在硬件層面,機器人系統的耐用性、能源效率以及軟硬件的深度集成仍是制約其大規模部署的關鍵瓶頸。所有挑戰中最根本、最核心的瓶頸,莫過于數據層面。研究顯示,物理世界中的高質量、多樣化數據極度稀缺,僅依靠合成數據訓練的模型往往難以應對現實世界的復雜性和多樣性,容易在真實環境中“崩潰”。機器人對不同環境的適應和泛化能力,直接取決于其訓練數據的多樣性。
這種數據瓶頸的成因并非偶然,而是由一系列深層因素交織而成。大規模真實數據的采集成本極為高昂,需要投入大量的人力、物力與時間。在復雜的環境中布置大量傳感器和監測設備,其采購、安裝、維護和更新費用都十分昂貴。物理世界的場景極其豐富且動態多變,要窮盡所有可能的情況幾乎是不可能完成的任務。機器人可能需要在各種氣候、地形和社會環境中工作,全面采集這些場景數據在現實中是無法企及的。不同機器人構型之間的差異使得數據難以復用,例如人形機器人和輪式機器人的數據因其運動和交互方式不同,通用性很低。這種缺乏實體間數據共享的局面,加劇了重復勞動和資源浪費,形成了阻礙行業發展的“數據孤島”。解決數據問題不僅是成本效率的優化,更是決定具身智能能否從實驗室走向大規模商業化落地的“成敗之戰”。
1.2 傳統數據采集的成本與效率困境
要深刻理解具身智能的數據困境,必須正視傳統數據采集模式所面臨的成本與效率挑戰。獲取大規模、高質量的機器人訓練數據主要依賴于勞動密集型和資本密集型的真機采集與人工標注。
真機數據采集本身就成本不菲。一條真機數據的綜合成本可能高達十幾元。為了訓練機器人學會一項任務,數據采集員需要反復調整物品位置,每天重復采集約200條數據,直至機器人學會為止。這種手動的、場景化的數據采集模式,不僅耗時耗力,而且進展緩慢。訓練一個非常好的模型可能需要約一萬小時的交互數據,這種巨大的時間投入對于任何企業而言都是沉重的負擔。
數據采集只是第一步,后續的數據標注環節則是一道難以逾越的“人肉長城”。高質量的數據標注對于構建準確可靠的AI模型至關重要。這項工作通常由人工完成,其成本高昂、效率低下且重復枯燥,隨著數據量和標注精細度要求的不斷提升,人工標注的成本也在不斷攀升。以行業服務為例,Amazon SageMaker Ground Truth的定價顯示,對單張圖像進行審核的成本可達0.08美元,而更復雜的語義分割任務價格則更高。對于多模態數據的標注,成本將呈幾何級數增長。除了高昂的費用,傳統模式在數據質量控制上也面臨挑戰。采集到的多模態數據需要進行時間和空間上的嚴格對齊,以確保不同傳感器數據之間的同步性和準確性。人工審核員需要仔細檢查數據在時間刻度上是否對齊、畫面是否有缺失,這些繁瑣的質量控制流程進一步降低了數據的使用效率,使得傳統模式的邊際成本難以降低。
這種高門檻、低效率的數據采集模式對行業生態產生了深遠影響。它使得高質量數據資源高度集中在少數擁有雄厚資本和技術實力的巨頭企業手中,對中小創業團隊而言,數據采集、大模型訓練與評測等工作都構成了難以逾越的高門檻。這直接導致了具身智能研究和商業化進程的資源不平衡,加劇了前面提到的“數據孤島”問題,阻礙了整個行業的知識共享和協同創新。要實現具身智能的廣泛普及和商業化,必須從根本上革新數據采集和訓練的范式。
新范式之基石:英偉達Newton與數字孿生技術
2.1 物理AI的核心驅動:英偉達Newton物理引擎
要構建全新的數據采集范式,必須引入能夠精確模擬物理世界,并能與AI模型深度融合的新一代技術。英偉達推出的開源物理引擎Newton,正是這一技術變革的核心驅動力。該項目由英偉達與谷歌DeepMind、迪士尼研究院等行業巨頭合作開發,旨在為機器人仿真提供一個統一、可擴展且可定制的解決方案。
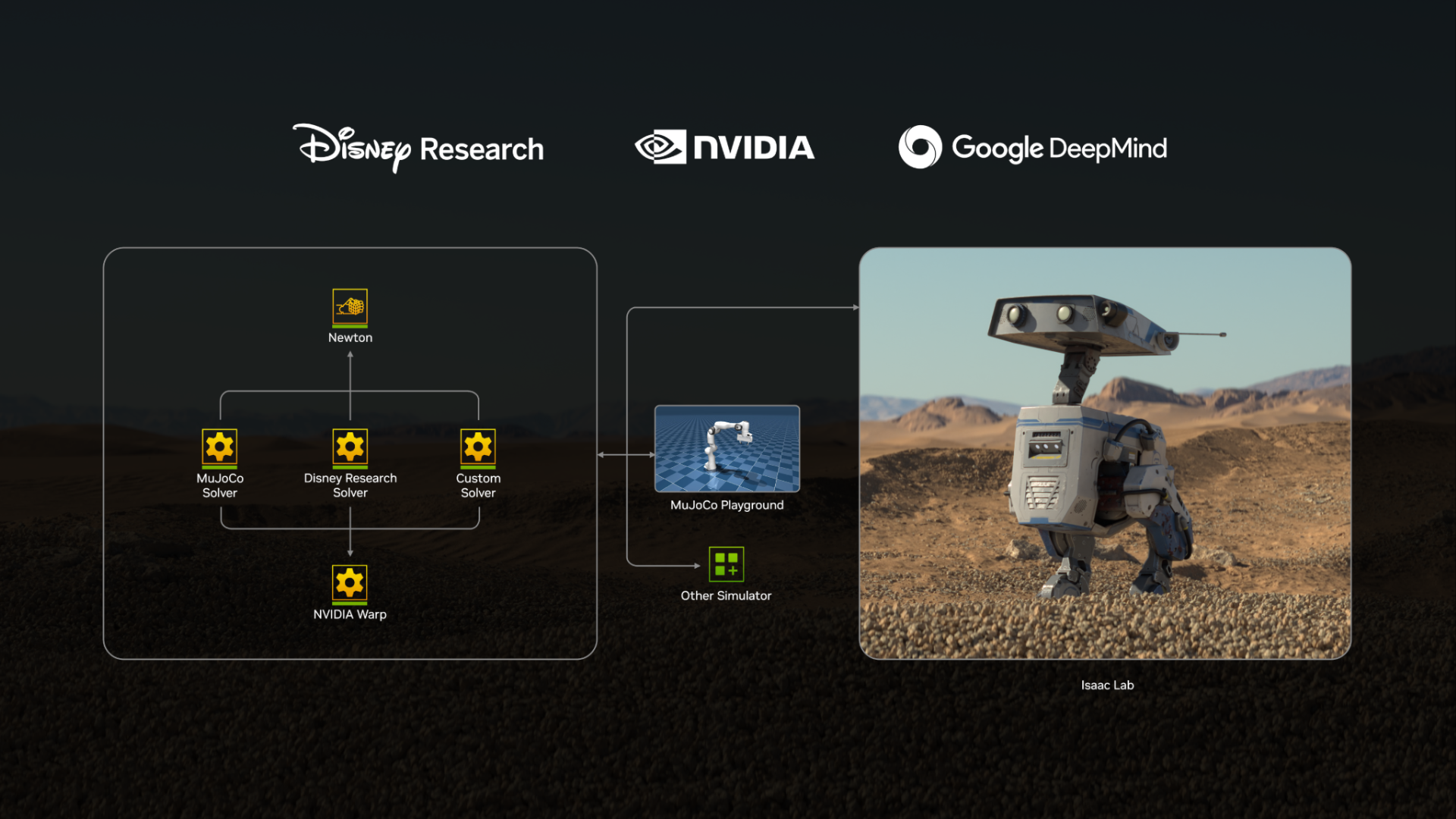
GPU加速與超實時操作:Newton基于英偉達的Warp框架構建,充分利用GPU的并行計算能力,實現了高精度的物理模擬和超實時操作。這使得機器人能夠在虛擬環境中以更高的精度和效率學習處理復雜的任務。
Differentiable Physics:這是Newton最具革命性的技術特性。它不僅能像傳統物理引擎那樣,從給定輸入預測仿真結果,還能計算仿真結果的反向模式梯度。這種能力使得系統參數的優化可以通過反向傳播直接進行,這意味著機器人可以像訓練神經網絡一樣,通過物理交互直接學習,彌補了現實世界數據無法完整涵蓋所有物理知識的缺陷。
基于OpenUSD構建:Newton基于OpenUSD構建,這是一種開放、可擴展的3D場景描述語言。與谷歌、迪士尼等公司的合作,旨在利用OpenUSD來統一機器人工作流,并為所有數據源提供通用語言。這一舉措在底層架構上打破了數據孤島的藩籬,為構建一個開放、可共享的具身智能數據生態奠定了堅實基礎。
Newton的出現標志著物理AI進入了一個新的時代。它不僅僅是一個仿真器,更是一個能夠讓機器人自主感知、解釋、推理并與現實世界交互的虛擬試驗場。其可微物理特性將物理模擬從簡單的“模擬現實”提升到了“學習現實”,讓AI系統能夠直接從虛擬世界的物理交互中獲得寶貴的梯度信息,大幅提升學習效率和泛化能力。
2.2 連接物理與虛擬:數字孿生的賦能力量
如果說Newton是物理AI的“大腦”,那么數字孿生則是連接其與物理世界感知的“軀體”。數字孿生是物理世界在虛擬空間中的高保真復刻,能夠實時、動態地映射實體對象、流程和設施。它的價值在于提供一個可控、可分析的虛擬環境,以便團隊進行設計、模擬和運營優化。
在工業領域,數字孿生早已不是新鮮概念,它在制造業、汽車、能源等多個行業得到了廣泛應用。其核心能力在于虛實聯動:通過IoT和IIoT傳感器,數字孿生能夠實時獲取物理設備和生產線的動態數據,將一個靜態的3D模型轉化為一個與現實完全同步的“實時孿生體”。這種實時數據驅動的能力為工業生產帶來了諸多好處:
實時監控與故障回溯:數字孿生平臺能夠接入百萬級數據連接,讓工程師實時監控設備狀態,并可通過時序數據回溯到歷史時間點,快速排查故障。
預測性維護:通過持續監控,數字孿生可以識別潛在的故障,并在設備完全失效前發出警報,從而大幅降低停機時間和維護成本。
虛擬調試與仿真:數字孿生是一個關鍵的“AI試驗場”,團隊可以在虛擬環境中安全地測試和驗證高級工業AI模型,如機器人編隊和氣流仿真,然后再將其部署到現實世界中。
數字孿生與AI的融合遠不止于數據的可視化和分析。它將物理世界的數據與虛擬世界的仿真能力相結合,形成一個強大的閉環系統。將從傳感器采集的有限數據輸入到數字孿生中,可以構建一個高度仿真的虛擬生產狀態,并通過數據可視化建模進行對比分析。這種“融合AI&仿真能力”的平臺,為實現用戶提出的“伴隨式數采”方案提供了完美的技術基礎。它將現實中的復雜生產環境以可控、可分析的形式呈現,并提供一個可供Newton物理引擎進行“多物理場仿真”的虛擬環境。
創新融合:Accompanied Data Collection的革命性方案
3.1 伴隨式數采的定義與核心架構
“伴隨式數采”的概念,是對傳統數據采集模式的根本性突破。它并非指簡單的跟隨機器人,而是一種無感、無侵入的數據采集范式。在這種模式下,數據采集不再是需要專門部署和中斷生產線的獨立任務,而是成為具身智能機器人日常運營的
伴隨副產品。這意味著,機器人每執行一個任務,每一次與環境的交互,都將作為數據源,持續不斷地為整個系統貢獻數據。這種模式將數據采集從一個昂貴的、離散的“項目”轉變為一個低成本、持續性的“服務”。
這種革命性范式的實現,依賴于英偉達Newton和OpenTwins的創新整合架構:
前端采集:具身智能機器人本身成為“伴隨式”數據采集的端點。它們通過搭載的多模態傳感器陣列實時、無縫地獲取生產環境中的各類數據。這包括機器人的本體姿態、力矩數據、操作動作,以及環境中的視覺圖像、點云數據和聲音等信息。
數據傳輸與對齊:輕量化的數據采集端點將這些多模態數據實時、高效地傳輸至云端數字孿生平臺。在這個過程中,數據對齊服務至關重要,它確保來自不同傳感器的數據在時間和空間上精確同步,為后續的仿真和分析提供高質量基礎。
中臺孿生:云端的數字孿生平臺將實時數據進行映射、建模與存儲,構建一個與物理生產線完全同步、高還原度的“實時孿生體”。這個孿生體不僅是物理世界的鏡像,更是所有數據的匯聚中心,支持事件回放、遠程監控和分析洞察等功能。
仿真與AI引擎:孿生體作為核心“數據種子”,喂給集成Newton物理引擎的智能仿真引擎。
這種架構從根本上解決了傳統數據采集模式“昂貴、耗時、需人工操作”的痛點。它將數據采集自動化并背景化,使得企業可以在不中斷現有生產流程的前提下,逐步實現智能化轉型。這大幅降低了具身智能的試錯成本和部署風險,將高昂的資本投資轉變為一種可控的、持續性的運營優化服務,為“具身智能+”應用場景的廣泛推廣提供了切實可行的路徑。
3.2 數據價值的指數級放大:仿真驅動的數據增廣
“伴隨式數采”方案最具顛覆性的價值,在于其能夠實現數據價值的指數級放大。
真實數據映射:將通過“伴隨式數采”采集到的真實機器人操作數據作為“種子”,實時映射到數字孿生平臺中的虛擬機器人上。這些數據包含了物理世界的底層約束和真實操作的寶貴信息。
物理引擎重演:利用英偉達Newton的可微物理引擎,在虛擬環境中對真實操作過程進行高保真的精確重演。
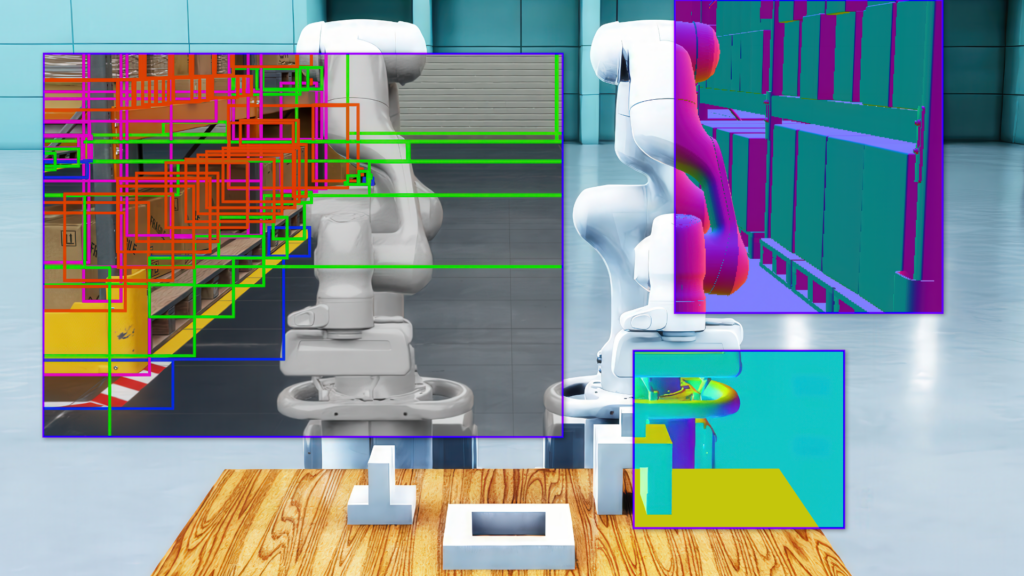
參數化增廣:在重演過程中,系統通過程序化地隨機改變物理和視覺參數來生成一系列新的訓練樣本。這部分能力由NVIDIA Omniverse Replicator等工具提供支持,它能夠通過異步渲染和基于事件的觸發器,大規模生成帶有精確注釋的合成數據。例如,可以改變:
材質特性:調整物體的摩擦力、硬度等物理參數。
光照條件:模擬不同光線強度、方向,甚至極端光照條件下的場景。
環境干擾:模擬物體的輕微抖動、位置偏移、甚至遮擋。
視覺紋理:改變物體的顏色、表面紋理等,以增強模型的泛化能力。
這一過程的巧妙之處在于,它利用了真實數據作為物理約束的基石,而借助了物理引擎的強大增廣能力。這使得生成的合成數據并非憑空捏造,而是物理上合理、邏輯上自洽的有效訓練樣本。這種技術路徑直接解決了“難以窮盡所有現實場景”的挑戰,尤其在應對現實世界中罕見、危險或難以復現的“長尾問題”方面展現出巨大優勢。通過仿真,企業可以安全、高效地生成這些極端案例數據,大幅提升模型的泛化能力和在復雜環境中的魯棒性。
這種范式的出現,將具身智能企業的核心競爭力從“誰擁有最多的真機和最大的采集場地”轉變為“誰擁有最高效、最智能的數據生成與管理管道”。這一轉變與互聯網時代的演變軌跡不謀而合,即核心價值從硬件基礎設施轉向了算法與數據平臺。通過仿真驅動的數據增廣,數據利用效率得到了指數級提升,為具身智能的快速發展注入了全新的動力。
成本與效率的量化分析
4.1 傳統模式與新范式的成本對比
傳統數據采集模式的成本構成:
| 成本項 | 成本構成與來源 | 備注 | |
| 真機數據采集 | 約人民幣10-20元/條 | 包含人力、機器、場地等直接成本 | 復雜的多模態數據標注成本更高 |
| 人工標注 | 圖像分類:0.08 USD/張 | 語義分割:0.84 USD/張 | |
| 硬件與運維 | 搭建專用物理場地、機器人硬件損耗、專家操作等高昂成本 | ||
| 長尾數據獲取 | 極高的邊際成本,難以規模化 | 需為罕見場景單獨投入資源 |
伴隨式數采新范式的成本構成:
| 成本項 | 成本構成與來源 | 備注 |
| 真實數據采集 | 約人民幣10-20元/條 | 成本顯著降低,主要源于無感、無侵入模式的效率提升 |
| 仿真數據生成 | 約人民幣兩分錢/條 | 成本僅為真機數據的1/500,且可批量生成 |
| 硬件與運維 | 依賴虛擬仿真環境,避免了對昂貴硬件的過度依賴 | 成本大幅降低,用于服務器等計算資源 |
| 長尾數據獲取 | 通過仿真批量生成,幾乎沒有邊際成本 | 從根本上解決了長尾問題的經濟性挑戰 |
4.2 加速投資回報:效率提升的關鍵
數據利用效率的倍增:大模型的出現已經將數據采集量需求大幅減少,數據采集效率得以提升數倍。在此基礎上,“伴隨式數采”通過仿真驅動的數據增廣,進一步將單條真實數據的利用價值提升了10-15倍。這種復合式的效率提升,使得模型訓練所需的數據量得以指數級減少,從而極大縮短了訓練周期。
Sim-to-Real技術的改進:將仿真環境中訓練的模型部署到真實世界,面臨著Sim-to-Real的挑戰。過去,這種遷移存在典型的傳感和驅動差異,導致模型在真實世界中泛化能力差。隨著技術的進步,現在已有解決方案能夠有效克服這些差異,例如通過順序運動模糊緩解策略優化視覺感知系統,以及采用反饋線性化方法補償動作差異。這些技術的成熟使得從虛擬到真實的知識遷移變得更加可靠,極大地減少了真機調試和測試的時間與成本。
開發流程的閉環化:傳統模式下的開發流程是一個緩慢、昂貴的瀑布流模型:首先進行昂貴的數據采集和標注,然后訓練模型,最后進行耗時耗力的真機測試。而“伴隨式數采”則將這一過程轉變為一個經濟、快速的迭代閉環:無感采集-孿生映射-仿真增廣-模型訓練。這種流程的根本性轉變,使得企業能夠以更高的頻率進行迭代和優化,將模型從概念開發到實際部署的周期大幅縮短。
這種范式轉變從根本上解決了長尾問題帶來的經濟性挑戰。傳統模式下,為解決罕見情況需要投入極高的邊際成本進行單獨的數據采集和標注,這在商業上是難以持續的。而“伴隨式數采”通過仿真批量生成這些數據,幾乎沒有額外的邊際成本,這不僅是效率問題,更是商業模式可持續性的核心。
超越數據:伴隨式數采的未來演進與產業影響
5.1 為具身大模型提供新一代“血液”
具身智能領域的下一步發展,正聚焦于具身基礎大模型的研發與應用。如同ChatGPT之于語言,這些基礎模型旨在通過海量數據的預訓練,掌握通用的感知、理解、推理和執行能力。基礎模型的性能,直接取決于其訓練數據的規模、多樣性和質量。傳統的互聯網數據雖然海量,卻缺乏與物理世界交互的寶貴信息,例如動作、物理反饋和環境變化。這正是具身大模型面臨的“數據鴻溝”。
“伴隨式數采”為填補這一鴻溝提供了理想的解決方案。它能夠持續、自動地提供高質量、大規模的多模態數據集,包含圖像、點云、文本、觸覺、聽覺等多種模態信息。這些數據不僅提供了物理世界的真實環境反饋,還包含了機器人操作的豐富動作信息,這正是互聯網數據所缺失的“血液”。高質量、場景化的數據將驅動具身大模型的持續迭代與性能提升。
“伴隨式數采”是SSL的天然加速器。自監督學習通過從無標簽數據中自動生成“偽標簽”,讓模型學習有意義的表示,從而大幅減少對昂貴人工標注的依賴。可以利用從數字孿生中生成的帶有精確注釋的合成數據,作為自監督學習的訓練素材。這種方法可以進一步降低數據成本,加速模型的訓練和迭代,使具身智能的開發更加高效。
5.2 推動新型工業化與智能制造
“伴隨式數采”的范式,將對智能制造和新型工業化產生深遠影響。它使得每一個在生產線上的機器人不再僅僅是一個執行任務的工具,而是一個持續的“動態傳感器”,源源不斷地為數字孿生平臺貢獻數據。這些來自不同機器人、不同工位的海量數據匯聚在一起,將實現對整個工廠、車間、乃至產線全要素的實時、全景洞察。
這種模式為智能制造提供了無處不在、無所不及的底層OT數據,實現了“數據驅動業務”的閉環,是工業4.0/5.0和新型工業化發展的關鍵技術。它將推動具身智能從“單點應用”走向“系統集成”。此外,它還能夠有效對抗智能制造系統中存在的“AI幻覺”風險。研究表明,AI幻覺常因傳感器數據中的噪聲或異常而產生。而“伴隨式數采”通過數字孿生和物理引擎的校準,能夠提供更純凈、更符合物理規律的數據,從源頭降低AI幻覺的風險,確保決策的可靠性。
這種范式將生產過程中的操作數據、環境數據、物理數據等進行結構化和場景化積累,使其成為可復用、可變現的“數據資產”。這將為傳統制造業帶來新的商業模式和增長點,其市場價值潛力巨大,被估算將超過10萬億美元,是互聯網行業的三倍之多。
關于TsingtaoAI
TsingtaoAI致力于終結具身智能"最后一公里"困局,讓企業AI應用驗證效率提升70%,開發周期縮短50%,幫助企業更快速且低成本實現具身智能落地應用。公司已通過華為昇騰Ascend Compatible認證,擁有300+技術專家團隊和20項AI領域知識產權,服務領域涵蓋智能制造、高校實訓等多個場景。
:UART 協議 —— 異步串行通信的底層邏輯)

















)
