毫米波 (mm-Wave) 雷達是汽車應用(例如高級駕駛輔助系統 (ADAS))的一種解決方案。本研究探索了商用毫米波雷達技術在車內應用領域的應用。本文提出了一種基于 77 GHz 毫米波雷達的車輛占用檢測器框架。本研究采用了德州儀器 (Texas Instruments) 的多輸入多輸出 (MIMO) 調頻連續波 (FMCW) 雷達 (AWR1642)。該系統可以通過測量人體的細微運動來檢測座椅上是否有人。為此,系統消除了靜態雜波,因此雷達返回的點云包含了人體信息。雷達安裝在車頂,以獲得最大的座椅視場。本文提出了一種同時利用每個座椅周圍點的密度和彌散度來確定座椅占用程度的算法。針對四座和五座車輛,我們給出了高精度的實驗結果。
引言
用于檢測、識別和統計車輛內乘員數量的電子系統被稱為車輛占用檢測系統。由于其在交通領域能夠有效緩解交通擁堵、節省時間和減少環境污染,其應用日益廣泛。交通擁堵問題日益嚴重,已成為大多數城市的一個嚴重問題。道路車輛數量的增加導致車速降低、道路堵塞、行程時間延長、浪費寶貴時間,并對經濟造成負面影響。政府法規正在推廣高乘載車輛 (HOV) 車道,將其作為一項提升道路和城市交通的新戰略。HOV 車道將通過鼓勵拼車、公共交通和公共交通的使用來緩解交通擁堵。HOV 車道和擁堵收費優惠政策的出臺也促進了車輛共享。然而,實施此類政策所需的車輛占用檢測通常采用勞動密集型的手動程序 [1]。考慮到環境標準,進入擁堵城市和場所的通道正逐漸受到限制。因此,預計未來幾年對車輛占用檢測系統的需求將會上升。
即使在最惡劣的環境下,例如惡劣天氣條件、強光或黑暗條件下,雷達技術也能識別人員的存在。與其他傳感技術不同,毫米波 (mm-Waves) 可以穿透塑料和衣物等材料。因此,傳感器可以隱藏在外殼后面或放置在汽車內部或下方,從而實現非接觸式和非侵入式。例如,壓力傳感器無法區分人體和靜態物體,而攝像頭在明亮或黑暗的光線條件下也無法檢測到嬰兒。最近,作者提出了一種基于低成本 60 GHz 相干脈沖毫米波雷達的座位占用檢測器和呼吸監測裝置。然而,由于其探測距離較短(發射功率低,探測范圍約為 1 米),因此必須在每個座位前方安裝一個雷達傳感器 [2]。超聲波距離傳感器也被提出用于座位占用檢測 [3];然而,它們存在與脈沖雷達類似的問題。為了避免來自鄰近物體或乘客的反射,每個座位都必須安裝一個。此外,超聲波傳感器可能會受到車內聲源的干擾,或者根據頻率的不同,可能會被寵物等動物聽到 [3]。本研究提出了一種不同的解決方案來克服這些限制。
本文提出了一種工作在77 GHz頻段的調頻連續波(FMCW)多輸入多輸出(MIMO)雷達,用于確定載有多名乘客的車輛的占用程度。本文結構如下:引言之后,第二部分回顧了用于檢測車內乘員的不同系統。第三部分描述了基于77 GHz毫米波雷達的擬議解決方案。第四部分給出了實驗結果和討論。最后,第五部分給出了結論。
綜述
一些研究和公司已嘗試設計一種自動化檢測方法來克服這一挑戰。文獻中提出的車輛占用檢測方法主要基于視頻系統,這些系統對圖像[1]、[4]、[5]、[6]、[7]、[8]、[9]、[10]和熱像[11]、[12]、[13]、[14]有不同的分類方式。最近,基于視頻和計算機工具的商業產品已針對這些應用進行設計并由施樂、Conduent Inc.、Invision AI、Fortran Traffic Systems Limited、Indra 和西門子等供應商銷售。然而,由于這些產品并非安裝在車內,而是安裝在車外,并且由于各種因素,例如車窗貼膜、遮擋、乘員姿勢變化、車速、尺寸、形狀、成像幾何變化以及惡劣天氣條件,基于視頻的車輛乘客占用檢測方法在區分乘客和座椅上放置的物體方面存在一些缺陷,從而降低了檢測成功率。與基于光學視頻的系統相比,基于熱成像的系統成本更高。因此,需要設計替代的、經濟高效的車輛占用檢測系統來吸引更多客戶。
在車輛內部集成檢測設備是確定車輛占用程度的另一種選擇。另一方面,車載座椅占用檢測系統也用于其他應用,因此這些應用可以共享一個系統。例如,安全氣囊系統是現代車輛的基本安全元件,它們需要有關可能占用座椅的乘客的存在和類型的信息才能正常工作。意外觸發的安全氣囊會導致昂貴的維修費用。
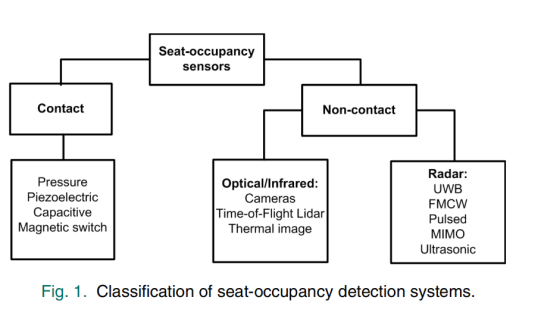
此外,在裝有后向式嬰兒座椅的座椅上觸發安全氣囊可能會導致致命傷害[15]。因此,需要安裝用于檢測座椅占用情況的傳感器,以防止在座椅未被用戶或后向式嬰兒占用時觸發安全氣囊。安全帶是另一個強制性安全系統。座椅占用檢測器的另一個應用是用作安全帶提醒器。傳統的安全帶提醒系統與重量傳感器配合使用。因此,當座位被行李或購買的物品占用時,就會發出不必要的警報。座位占用監測系統除了滿足法規要求(例如根據占用率管理空調系統)外,還可用于提高乘客的舒適度。另一個用途是提醒乘客注意兒童或寵物的存在,防止駕駛員將他們遺忘在車內。文獻中提出了各種車載檢測座位占用的方法。主要有兩種方法:接觸式和非接觸式。第一種方法是在座椅上安裝傳感器來檢測人員的存在,而第二種方法則依賴于使用電磁波或光學系統檢測遠處乘員的設備。圖1所示的示意圖總結了不同的座位占用檢測系統。壓力傳感器是一種廣泛使用的接觸式檢測座位占用的方法[16],[17]。這些傳感器的主要局限性在于對振動敏感,并且乘客必須與座椅接觸。另一種傳感器基于電容式傳感技術,由一組嵌入座椅的電極陣列組成[18],[19],[20]。另一方面,這些傳感器對干擾以及乘客與座椅之間的距離敏感。
近年來,非接觸式座椅占用檢測技術日益受到關注。光學傳感器,例如攝像頭[21]、[22]、[23],可以作為檢測系統的可行替代方案,尤其適用于后座應用。最近,在[23]中,研究了一種基于攝像頭的方法,通過連接到安全帶上的反射物體監測呼吸。此外,基于卡爾曼濾波器,利用光檢測和測距 (LiDAR) 傳感器測量飛行時間也被提出作為一種座椅占用檢測方法[24]。基于攝像頭的系統的主要缺點是它們依賴于人臉或形狀檢測,這使得它們難以在弱光環境下或兒童穿著衣服時使用。與基于攝像頭的視覺系統不同,LiDAR 可以提供距離信息。然而,LiDAR 傳感器的價格仍然較高(與集成毫米波雷達相比),并且圖像處理的計算成本也較高。紅外攝像機可以利用人體熱量在弱光條件下檢測人員,但在車內溫度較高(例如夏季)時,可能無法區分人員。此外,紅外攝像機比傳統攝像機更昂貴。這些視覺系統使用大量的信號處理技術,這大大增加了系統的計算成本和資源。毫米波雷達傳感器和車聯網 (V2X) 通信 [25] 等新技術的最新發展,有助于開發未來的車輛占用檢測系統。由于各種高級駕駛輔助系統 (ADAS) 的大規模市場推廣不斷增加,以及用于 5G 通信系統的毫米波半導體器件的開發,這些雷達的成本正在下降。用于車輛占用檢測的雷達系統正開始受到研究。汽車設計師已經成功地將毫米波傳感器集成到車內,用于汽車應用。這些潛在應用之一是能夠在考慮各種光照條件和傳感器位置的情況下檢測車內乘員,而無需考慮運動情況。例如,這可以幫助汽車系統檢測車后座無人看管的兒童或乘員的位置以控制溫度。
最近,人們研究了不同類型的雷達用于生命體征監測,例如[26]、[27]和[28]、連續波 (CW) 多普勒雷達 [29]、[30]、[31]、調頻連續波 (FMCW) 雷達 [32] 或脈沖無線電超寬帶 (IR-UWB)。然而,專注于汽車座艙應用的研究相對較少。最近,[33] 和 [34] 分別提出了基于 24 GHz 和 77 GHz FMCW 微波和毫米波雷達的座位占用率檢測方法。 [35] 提出了一種基于監測接收的超寬帶 (UWB) 信號的座位占用檢測方法。[2] 提出了一種基于 60 GHz 相干脈沖雷達的系統,該系統能夠檢測乘客的存在并測量呼吸頻率。這項工作基于時分復用 (TDM) MIMO FMCW 雷達技術,因為它能夠同時檢測微小運動以及多個目標的距離和角度 [36]。這些特點,加上該技術在汽車領域的成熟度以及汽車制造商的經驗,使其與其他雷達技術相比,成為此類應用的理想選擇。
系統設計和理論背景
系統概述
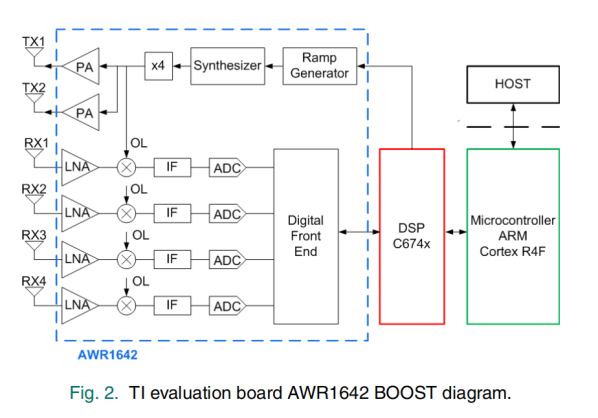
該系統基于德州儀器(TI,美國德克薩斯州達拉斯)的毫米波 AWR1642 雷達芯片組 [37]。它包含一個調頻連續波 (FMCW) 雷達,該雷達具有兩個發射器和四個接收器,內置鎖相環 (PLL) 和模數轉換器 (ADC)。本研究使用 TI 的評估板 AWR162 BOOST [38],該評估板還集成了 C674x 數字信號處理器 (DSP) 和 ARM R4F 基帶微控制器,用于信號處理、雷達設置以及與外部主控制器的通信。圖 2 顯示了該評估板的框圖。該雷達可在 76-77 GHz 或 77-81 GHz 頻段工作,發射功率高達 12.5 dBm。該評估板實現了一個交錯虛擬天線陣列 [36],由八個等效天線組成,天線間距為 λ/2。陣列中每個天線在 76-81 GHz 工作頻段的最大增益為 9 dBi。
為進行演示,雷達懸掛在汽車天窗上,指向座椅,如圖3所示。
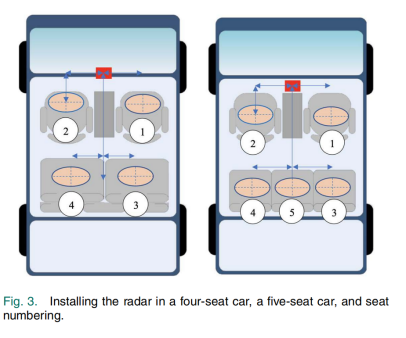
在實際的非演示場景中,它很可能安裝在后視鏡、儀表盤周圍,甚至天花板上。安裝時,雷達必須在座椅的直視范圍內具有最大的可見度,以避免遮擋信號。此外,該系統還可以應用于手勢識別應用,正如最近的研究[39]中提出的。我們將研究兩種情況:一輛四座汽車和一輛五座汽車,如圖3所示。圖4顯示了安裝在用于本研究測試的車輛前玻璃上的雷達板。
基本測量理論
FMCW 雷達發射由 L 個線性調頻信號組成的幀(見圖 5)。
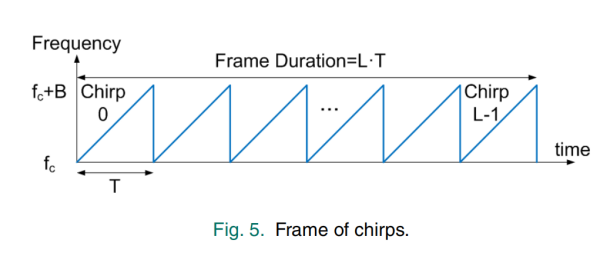
每個線性調頻信號的頻率隨時間變化,從最小值 fmin 到最大值 fmax,呈鋸齒狀,即 B =?fmax ? fmin。線性調頻信號執行頻率的線性掃描,從特定頻率值到更高頻率值(或反之亦然)。典型的 FMCW 線性調頻信號可以寫成:

其中,μ = B/T 為線性調頻信號的斜率,T 為掃描時間。發射信號由 L 個線性調頻信號組成,可表示為:

其中 (t) 是歸一化的矩形信號(介于 t =?0 和 t = T 之間)。在四個接收機中,接收信號
和發射信號經過混合和濾波,最終獲得差拍信號,該信號以 fs 的速率進行采樣和離散化,并使用快速 ADC 進行后處理。對于每個第l個啁啾,第 k 個陣元的接收信號由下式給出 [40]:

對于第 l 個啁啾和第 k 個陣列元件 ylk (t) 獲得的差拍信號可以表示為 [40]:
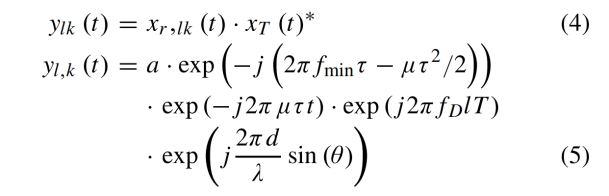
其中,a 為目標振幅,d 為相鄰天線單元之間的間距,λ 為載波頻率下的波長,τ?為傳播延遲,fD 為速度引起的多普勒頻移,θ 為到達角 (AoA)。因此,第一項為復振幅;第二項為取決于距離的到達時間項;第三項為多普勒,與運動有關;最后一項為取決于 AoA 的到達方向 (DOA)。樣本 ylk [n] = ylk (nTs),其中 n = 0, 1, ..., Ns ? 1,保存在一個三維矩陣中。
對于靜止目標,傳播延遲 τ 與到目標的距離 r 成正比。

然而,對于人來說,呼吸引起的胸部位移會引起周期性的調制,
可以建模如下:

其中,fb 是呼吸頻率(通常在 0.1 至 0.3 Hz 之間),rb 是呼吸位移,約為 5 mm [41]。代入式(5)中的 τ,經合理近似后,可得到以下表達式:
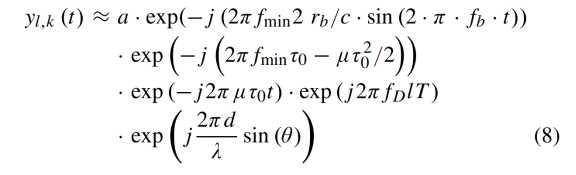
其中τ0 = 2r0/c是與身體距離r0相關的平均傳播延遲。由于胸部位移低于距離分辨率(幾厘米量級),最后一個方程可近似為以下表達式:

此外,二次項,例如 μ(rb/c · sin(2 · π ·fb · t))2 以及其他涉及呼吸幅度的混合積,也可以在第一次近似時忽略。分析 (8) 式的第一項,可以看出,接收信號的相位受到呼吸引入的慢速變化的調制

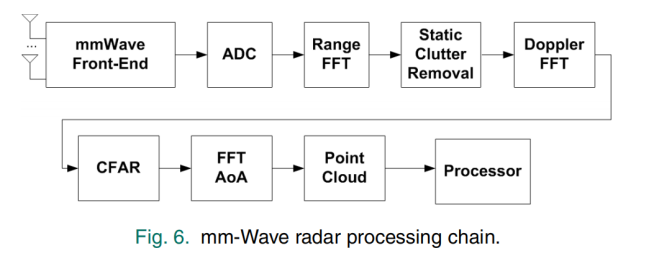
胸部位移與最低頻率λmin = 3.89 mm 下的波長相當。因此,預計慢時間中會發生顯著的相位變化。這些相位變化不會影響位置或速度的確定,因為它們低于距離和速度(多普勒)分辨率,并且呼吸引起的相位變化在每個啁啾中近似恒定。然而,如果將這些細微變化視為連續雷達采集之間時間的函數,則可以提取有關目標呼吸特征的信息 [42], [43]。特別是,在本文中,它用于區分人與其他物體。圖 6 描述了板載 DSP [44] 中實現的處理鏈。對每個啁啾的樣本應用加窗快速傅里葉變換 (FFT)(距離 FFT)來估計距離。距離分辨率取決于區分頻譜峰值以分辨目標的能力。因此,距離分辨率由以下公式確定:

為了實現最大距離分辨率,在雷達設置中選擇了最大掃描帶寬。考慮到3.4 GHz的帶寬,根據(11)式可獲得4.4 cm的距離分辨率。本研究的主要目標是根據檢測到的可能與呼吸相關的微小運動來區分座椅上的人員和無生命物體,或者區分人員和靜態雜波。因此,在執行二維快速傅里葉變換(2D-FFT)之前,通過減去輸入樣本的平均值來實現靜態雜波消除算法。對于每個距離單元,每個天線,計算樣本的平均值,并從樣本中減去該平均值。幀周期選擇為10 fps的場景更新率,以便跟蹤緩慢的變化。采用表一所列參數,最大不模糊距離為11.1米,最大徑向速度為1米/秒,徑向速度分辨率為0.0625米/秒。
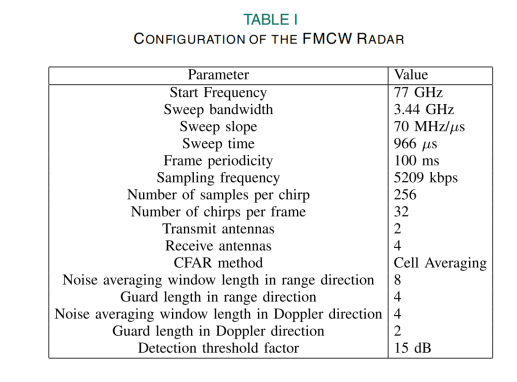
隨后,對每個啁啾和天線通道進行另一次快速傅里葉變換 (FFT)(多普勒快速傅里葉變換),從而獲得第k個陣元的距離-多普勒圖。為了減少雜波,采用恒虛警率 (CFAR) 算法估計閾值。低于該閾值的點被視為雜波,并從距離-多普勒圖中刪除。目前,文獻中已提出了幾種 CFAR 算法 [45], [46];然而,本文采用單元平均 (CA CFAR)?算法,因為它簡單易用 [47]。該算法通過對鄰近單元與目標單元進行平均來估計周圍的噪聲功率。實驗中使用的 CFAR 算法的參數列于表一。本文考慮了被測單元 (CUT) 在距離方向上兩側各有 8 個訓練單元和 4 個保衛單元,以及在多普勒方向上兩側各有 4 個訓練單元和 2 個保衛單元。閾值由平均功率噪聲和閾值因子(或最小信噪比 (SNR))15 dB?獲得。然后應用第三次 FFT(AoA FFT)[44], [48]。基于 FFT 的 DOA 檢測算法因其復雜度低且易于實現而成為最廣泛使用的算法 [49]。角度估計是通過處理由多個陣元組成的陣列接收的信號來實現的。最簡單的算法是角度 FFT 算法。如果通過接收陣元在空間維度上進行傅里葉變換(稱為角度 FFT),就可以根據物體在方位角上的 AoA (θ) 來區分它們。
在本應用中,角度精度并不重要,因為它用于近似估計乘客所在的區域。因此,本研究采用了角度FFT算法。不過,也可以采用增強型角度算法,例如ESPRIT [50]、MUSIC [49]、[51]或Capon波束形成器[52]。在本研究中,雷達提供的點云數據被用作占用檢測算法的輸入。整個過程需要三次FFT(距離、速度和角度),如圖6所示。雷達板卡內部DSP單元中加載的mm Wave SDK 3.5固件[44]用于計算點云。雷達使用命令行界面(CLI)命令進行配置,測量數據通過USB總線返回。數據以10 fps的速率更新,足以檢測呼吸引起的點云變化。
雷達傳感器板上對雷達接收的信號進行初步處理,生成點云[44],[48]。該板會根據先前保存的噪聲曲線估算出每個點的信噪比 (SNR)。然后在 Raspberry Pi 4 或個人電腦上處理點云。座位占用率算法將在第四部分中描述。
座位占用算法
圖 7 和圖 8 分別顯示了四座和五座汽車的點云和 10 秒內每個點的測得信噪比 (SNR)。雷達僅返回信噪比值高于閾值(本例中為 15 dB)的點。因此,低于此閾值的點不會出現在這些圖上。空座位對應的區域通常不會顯示點。在這種情況下,這些點被視為靜態雜波,并使用專門為此設計的算法進行消除。為了觀察該算法的效果,圖 9 顯示了應用或未應用靜態雜波算法對一輛空的四座汽車的測量結果。
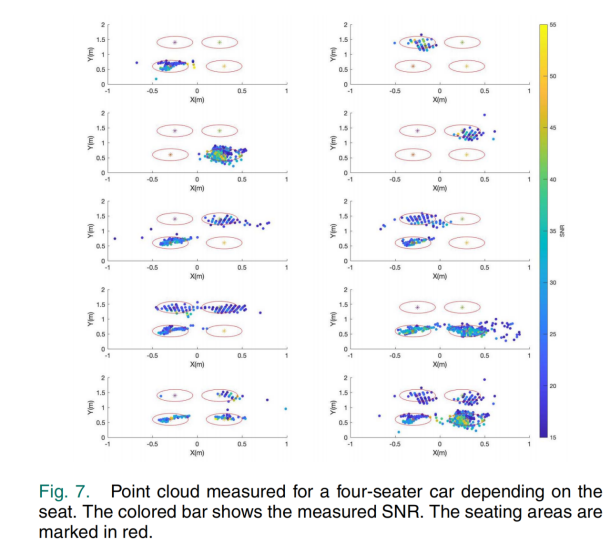
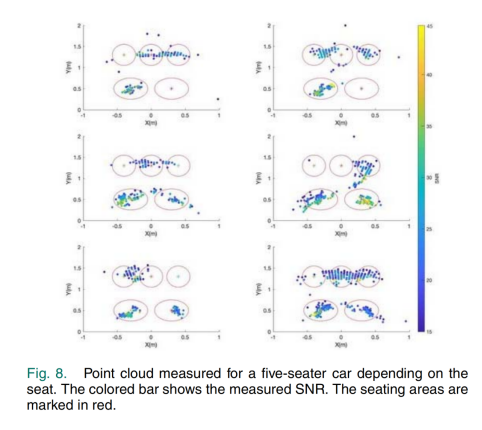
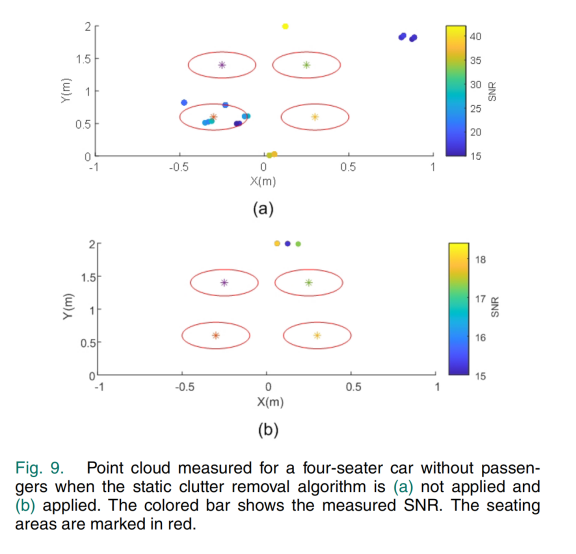
閾值因子決定了所需的誤報概率。該值是根據對無乘員車輛的測量結果根據經驗選擇的。研究發現,對于大多數情況和車輛,15 dB 的水平可以消除感興趣區域內靜止物體的反射[見圖 9(b)]。范圍大于座位區域的點被移除,因為它們被認為是由車壁或車外物體的反射引起的。基于這些圖,我們開發了一種根據某些特征進行分類的算法。首先,我們定義了一些參數來粗略地確定圖7和圖8中紅色所示的座位區域。人體所占據的空間面積近似于一個橢球體的面積。這些橢球體以車輛內部中心的坐標(Xk,Yk)以及水平(Rxk)和垂直(Ryk)的半徑為參考點,其中k是座位的索引,k = 1,...,Nseats。這些參數是算法的輸入,并且可能因車輛而異。但是,它們可以根據車輛模型從表格中獲取,也可以由用戶手動指定。例如,表 II 提供了定義兩輛四座和五座汽車座位區域的數值。
該算法考慮了一段時間 (Ta) 內保存的點云。計算出每個點的區域后,它們的坐標將保存在向量 Xk 和 Yk 中。如果點 (xi, yi) 屬于橢球體,則它位于區域 k 中。

其中,XCk 和 YCk 分別為區域 k 中心的坐標,Rxk 和 Ryk 分別為橢圓體在 x 和 y 方向上的半軸。那么,點云中屬于特定區域的點 Nk 的數量,就是向量 Xk 或 Yk 的長度。
就座者的移動會導致每個座位上點的分散。每個區域中點的標準差可以衡量這種分散性。

其中 E() 表示均值算子,Xki 和 Yki 分別是向量 Xk 或 Yk 的分量。分類函數定義如下:

該歸一化函數對應于每個區域中點的標準差(σk)乘以該區域中點的密度(Nk/N)。該函數包含點的比例,以避免座位空置時出現誤檢。空置座位的特征是雷達讀取的點數量較少,有時由于殘留雜波而分散。每個區域都有一個閾值THk。如果fk > THk,則認為該座位已被占用。座位狀態(0或1)保存在向量sok中。

較低的閾值THk會增加誤報概率。該閾值是通過實驗獲得的。由于存在一定的遮擋,前排和后排座椅的閾值會有所不同;因此,觀察到后排區域的點數少于前排區域。閾值是固定的,是根據從多組訓練測量中獲得的函數fk的典型值得出的。為此,我們考慮了不同志愿者占用不同座位數的各種場景,計算了空座位fk函數的平均值和標準差。然后將閾值確定為平均值減去三倍標準差。所得值列于表II。我們發現,在大多數情況下,即使車輛不同,也可以使用相同的值。訓練測量值已通過獨立測量進行了統計驗證,混淆矩陣的結果將在第五部分中展示。
最后,對座位占用率向量進行平均,以消除與乘客移動(例如,上下車時)相關的誤差。使用移動平均濾波器(例如,對最后 M = 3 個樣本進行平均),并將結果與閾值(m = 0.5)進行比較。濾波后的座位占用率sok 可由以下公式獲得:
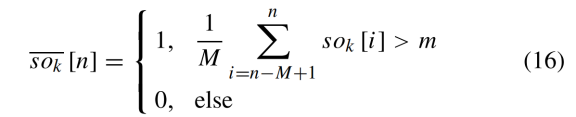
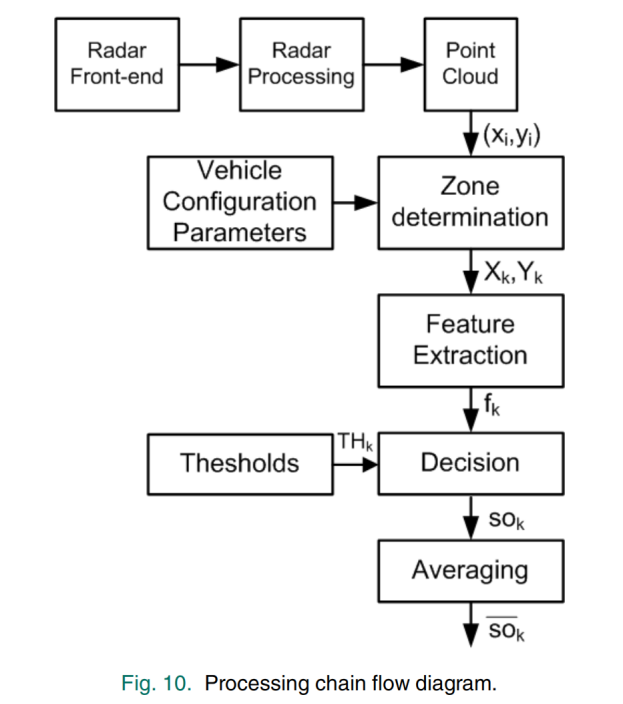
其中 sok 是第 k 個座位的占用率。圖 10 展示了該算法的流程圖。該算法已在 MATLAB 和 Python 中實現。Python 允許在包括 Raspberry Pi 平臺在內的不同平臺上運行該算法。由于該算法不需要管理長向量或復雜函數,因此計算成本和內存容量較低。
分類函數的評估僅需幾毫秒,明顯低于收集具有足夠點數的可靠點云所需的采集時間。因此,該算法返回座位占用率的速率取決于采集時間參數。對于商用產品,該算法可以輕松地在其他嵌入式設備上實現,甚至可以在雷達內置的微控制器中實現。
結果
不同情況下的占用檢測及算法參數的影響
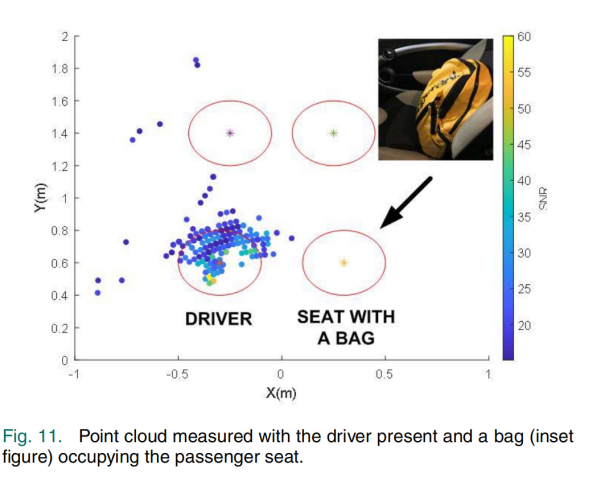
首先,測試了采集雷達算法,以區分可能占用座位的人員和物體。圖 11 顯示了在駕駛員乘坐的汽車中測量的點云,側座中有一個包。包內裝有一臺筆記本電腦,使其具有高反射率,從而提高了雷達收集回波的水平,并考慮了最壞的情況。可以看出,在放置包的座位上幾乎沒有任何點。這是因為包保持靜止,信號被靜態雜波抑制算法消除了。為了證實這一事實,在僅使用靜態雜波算法的車內進行了測量。
結果如圖 12 所示。由于金屬箱和其他金屬物體的存在,測量到一個靜止的強點,但雜波消除算法將其消除。該圖證實了 CFAR 算法中檢測閾值的選擇正確。由于胸部的周期性運動,呼吸會產生低頻微多普勒。因此,可以使用多普勒雷達[30]、[31]、調頻連續波雷達[32]或時域超寬帶[26]和毫米波雷達[2]來測量生命體征。然而,測量呼吸頻率需要先進的信號處理算法,如果目標僅僅是檢測人員是否在場(正如本文所提出的),則無需使用這種算法。
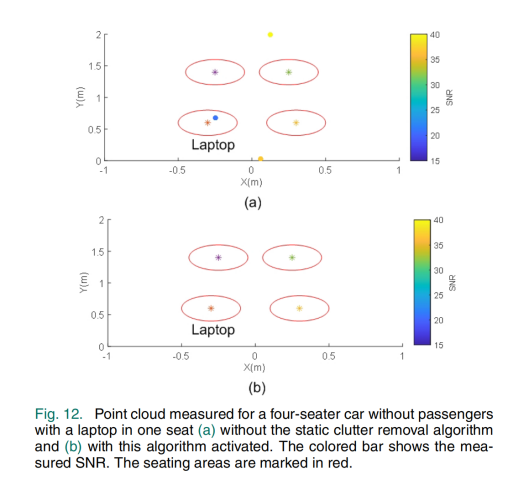
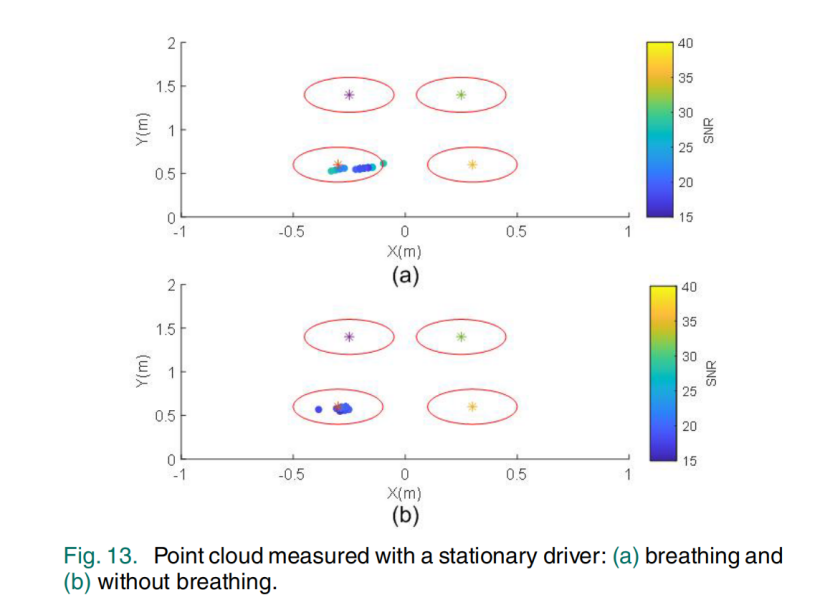
圖 13 比較了兩種場景下的點云:駕駛員在采集期間正常呼吸或屏住呼吸。在這兩種情況下,人員都保持靜止。可以觀察到,由于胸部運動,點云的彌散度增加,而平穩雜波去除算法無法完全濾除胸部運動。
進行了另一項測試,結果表明車輛運動不會顯著影響檢測。圖 14 展示了所得結果;可以觀察到,相對于靜態情況(即圖11所示的情況),點云幾乎沒有變化。
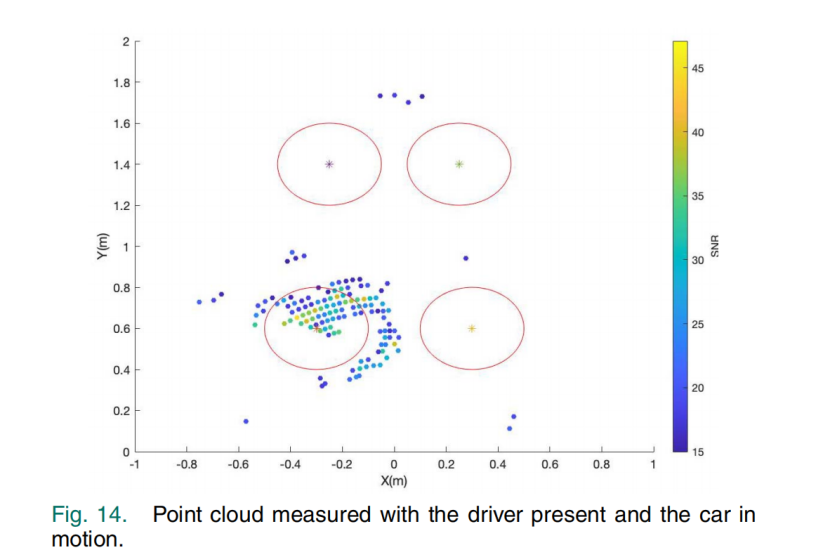
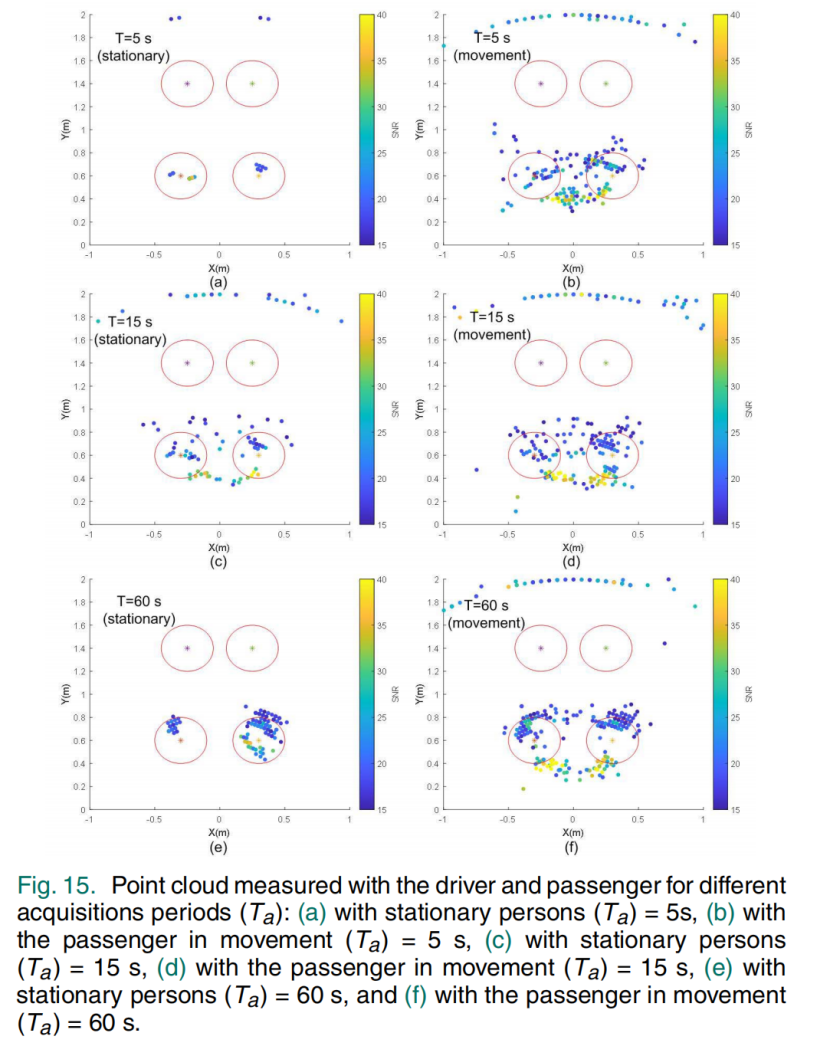
圖15顯示了采集周期Ta和乘客移動對點云的影響。隨著采集周期的增加,點云總數N和每個區域中的點數Nk增加。由于乘客看似靜止,但不可避免地會移動,因此彌散度也會增加。因此,在左圖中,點云仍然位于座椅區域內。然而,在右圖中,乘客向駕駛員做出手勢來顯示這些影響。可以觀察到,座椅區域外的某些點與此類移動以及車廂內反射產生的遠處點相對應。移動的影響使彌散度σk增大。然而,移動不會增加與空座位(本例中為后排座椅)相關的點。較長的采集時間通常可以減少與隨機乘客移動相關的誤報,但另一方面,占用率的更新速度會更慢。10-15秒的數值代表了一種妥協的情況。
分類器性能
為了驗證從訓練樣本中獲得的閾值的選擇,我們對多名志愿者進行了測量。不同的人隨機坐在車內的任意座位上,手動記錄已占用座位的位置,并與分類算法給出的預測值進行比較。圖16和圖17分別顯示了四座和五座車輛的乘員人數混淆矩陣。
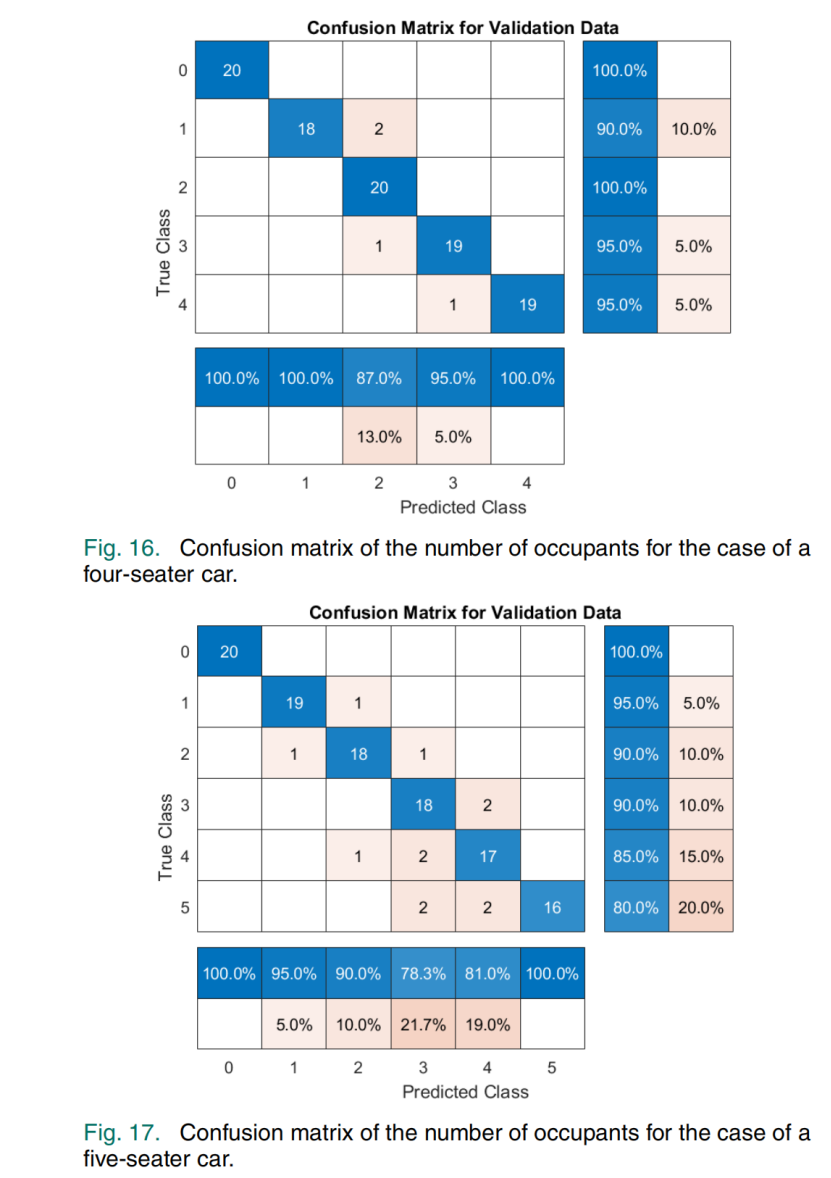
混淆矩陣圖中,行表示預測類別(輸出類別),列表示真實類別(目標類別)。在這些圖中,類別是車內乘員人數。行匯總顯示了每個真實類別中正確和錯誤分類的觀測值的百分比。同樣,列匯總顯示了每個預測類別中正確和錯誤分類的觀測值的百分比。四座和五座車輛的準確率分別為96%和90%。五座車獲得的較低值是由于后排座椅之間的距離小于四座車,因此區分后排座椅更加困難。
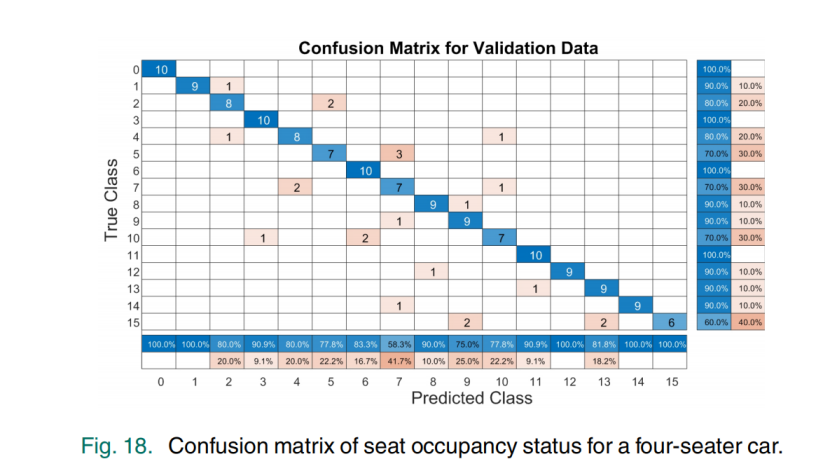
為了研究預測正確座位的誤差,圖18展示了四座車中每個座位狀態的混淆矩陣。類別采用二進制編碼(0001表示1號座位有人,1111表示所有座位都有人)。可以看出,大多數誤差發生在后排座椅上,因為后排座椅的位置不像前排座椅那樣清晰。即便如此,獲得的誤差也是可以接受的(準確率為86.125%),尤其是在占用率可以隨時間平均的情況下,只要乘客不進出車輛,占用率就不會變化。
占用探測器的動態性能
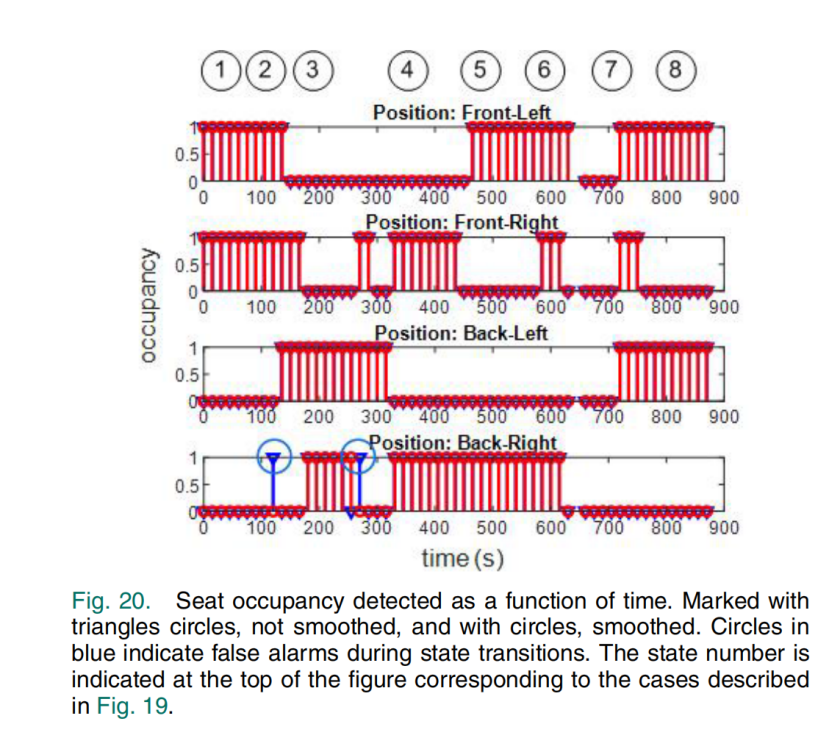
所提算法計算量低,因此可以實時實現,并允許動態更新座位占用情況。圖 19 和圖 20 展示了四座車廂中每個座位的占用情況檢測示例(0 表示空閑,1 表示占用),該檢測結果與時間和乘客進出車輛的時間變化有關。圖 19 描述了每個時間間隔(狀態)中被占用的座位,這些時間間隔用圓圈圈出的數字表示。
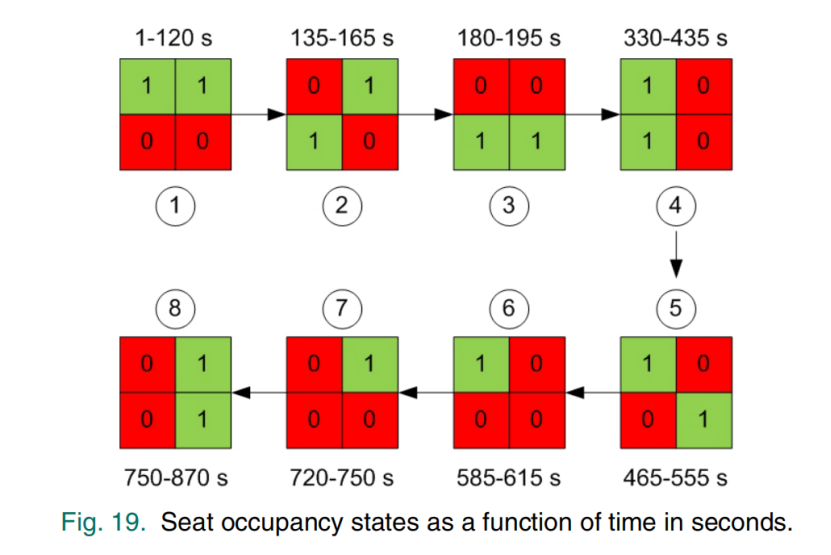
圖 20 展示了圖 19 中描述的每個時間間隔的占用情況檢測結果與時間的關系。可以觀察到一些孤立的錯誤,用藍色圓圈標記,對應于乘客進出車輛(圖 19 中表示的轉換)。
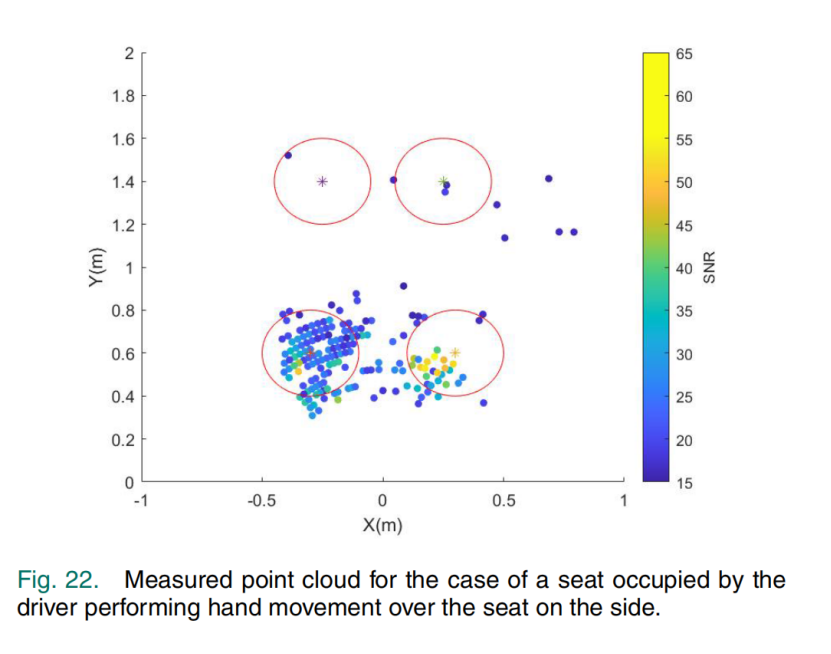
然而,該算法在位置保持穩定時檢測座位占用情況。可以使用 (16) 中提供的移動平均濾波器去除這些與轉換相關的錯誤點。為了研究乘客運動的影響,我們進行了一些實驗。圖21顯示了以15秒為周期更新的座位占用情況。在這種情況下,駕駛員在旁邊的空座位上做了手勢。
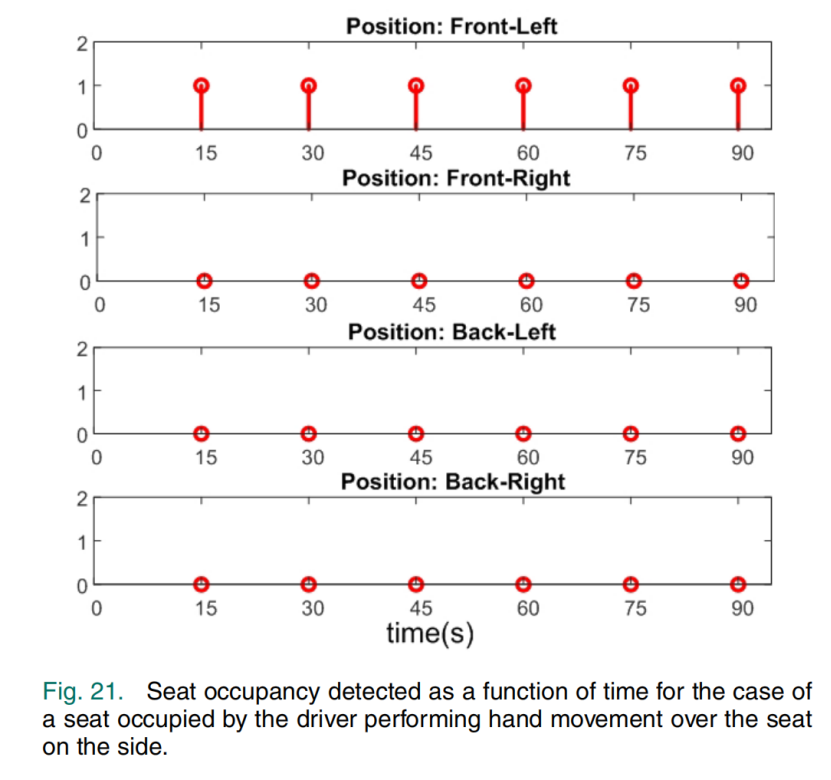
圖22中觀察到的點云是在手經過的座位區域進行的測量。然而,由于點的密度相對較小,該算法無法檢測到空座位的占用情況。
相反,圖23顯示了駕駛員突然移動并侵入相鄰座位區域的情況。從中可以看出,當側座發生侵入時,算法是如何檢測到側座占用的。
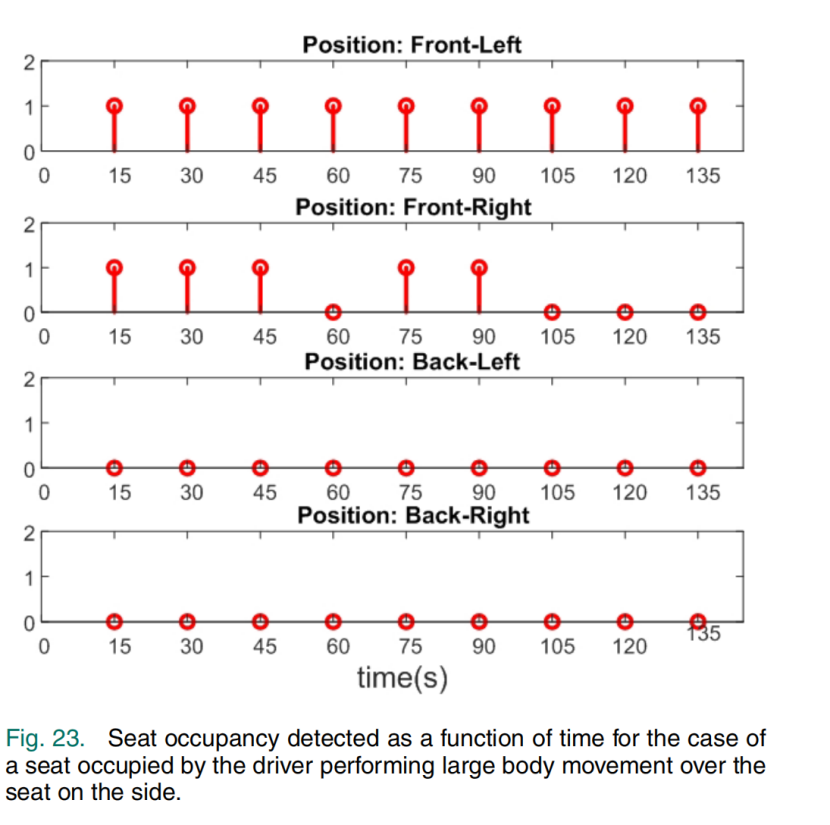
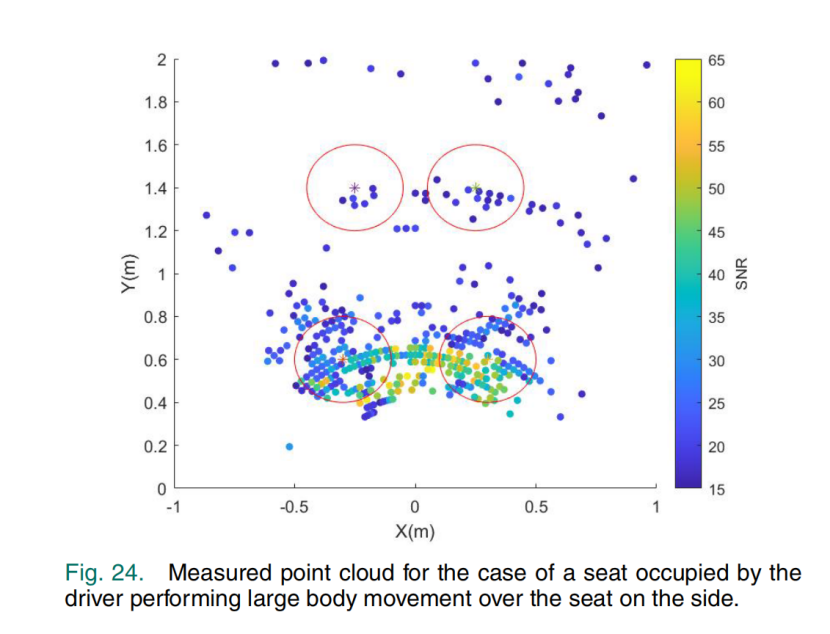
圖24顯示了由側座上身體移動引起的測量點云。然而,在沒有移動的情況下,該算法再次檢測到了空座位。因此,所提出的技術在存在相關乘客運動時會產生誤報,但一旦這些運動停止,就會恢復到穩定狀態。這些隨機誤報如果發生在車門關閉時,則可以被檢測到,因為此時總乘員人數應隨時間保持不變,因此可以將其視為異常值。這些情況可以通過結合座椅上的壓力傳感器(例如安全氣囊傳感器)來確定,這些傳感器會指示座椅上沒有物體。
結論和未來工作
本文研究了一種基于 77 GHz MIMOFMCW 毫米波雷達的車輛占用檢測系統。該雷達懸掛在車輛頂棚上,但也可以安裝在其他能夠看到乘客的位置。本文提出了一種根據雷達讀取的測量點云來確定座位占用情況的算法。本文采用靜態雜波消除算法,僅考慮與身體細微運動相關的點。因此,該系統能夠檢測乘客并將其與可能占用座位的其他物體區分開來。本文還采用了一種分類方法,該方法基于一個函數,該函數考慮了點云在座位所在區域周圍的分散性以及點云的點密度。本文提出的算法只需要很少的參數,這些參數可以通過訓練測量進行調整。據觀察,這些值通常適用于不同類型的車輛。因此,無需使用需要訓練程序的復雜學習工具。這些參數均已手動調整。然而,返回點的數量以及占用座位標準差的不同特征,在未來基于機器學習技術的高級分類器研究中可以得到充分的利用。雖然其在嵌入式系統中的實現不如所提出的技術那么簡單,但其性能還有提升空間,并且其結果可以推廣到其他類型的車輛或場景。針對四座和五座汽車的實驗結果已得到展示,在確定乘客人數和占用座位位置方面均實現了高精度。這項研究為將所提出的占用檢測器與未來的車輛通信系統相結合,例如應用于高乘員(HOV)車道,開辟了新的前景。
)


)

的IMDB評分)




![daily notes[7]](http://pic.xiahunao.cn/daily notes[7])
)


)




】系統設計:結構化設計與面向對象設計)