光束質量分析儀是用于精確評估激光光束特性的核心設備,通過測量光束的強度分布、相位分布、發散角等參數,為激光系統的優化、加工工藝控制及科研實驗提供關鍵數據支持。
以下是光束質量分析儀的詳細解析:
一、核心功能 -?光束強度分布分析
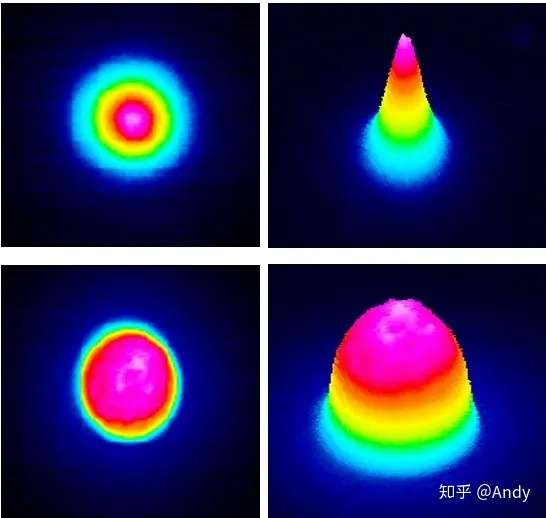
- 測量內容:獲取光束在橫截面上的能量分布(如高斯分布、平頂分布、多模分布等)。
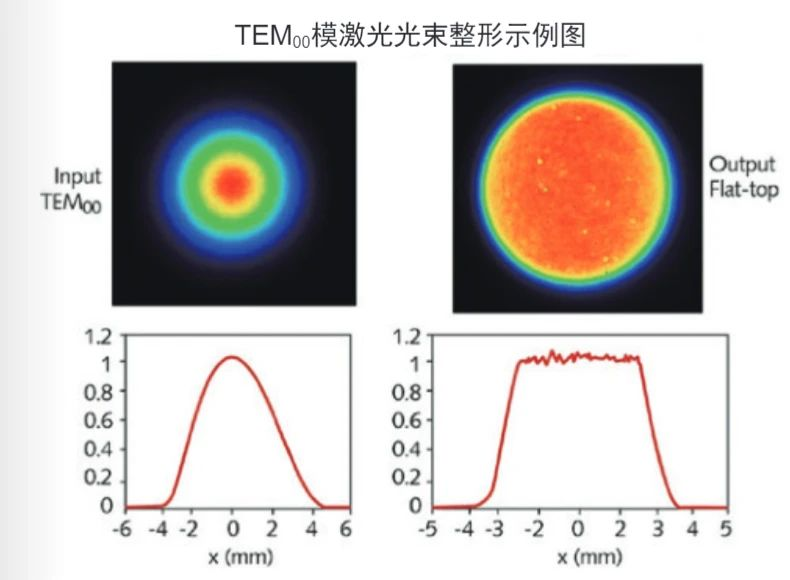
- 應用場景:判斷激光模式(TEM??基模或多模)、優化諧振腔設計、調整光束整形器件(如擴束鏡、透鏡組)。
光束強度分布是描述激光或其他光束在橫截面上能量(或光強)隨空間位置變化的函數,是光束質量評估、光學系統設計和應用優化的核心參數。以下從定義、理論模型、測量方法、影響因素及應用場景五個方面展開解析:
1.1、定義與物理意義
- 定義:
- 光束強度分布(Beam Intensity Profile)指光束橫截面上單位面積的光功率(或光強)隨坐標(x,y)的變化關系,通常表示為?I(x,y)。
- 對于旋轉對稱光束(如TEM??模),可簡化為徑向分布?I(r),其中?r=x2+y2?。
- 物理意義:
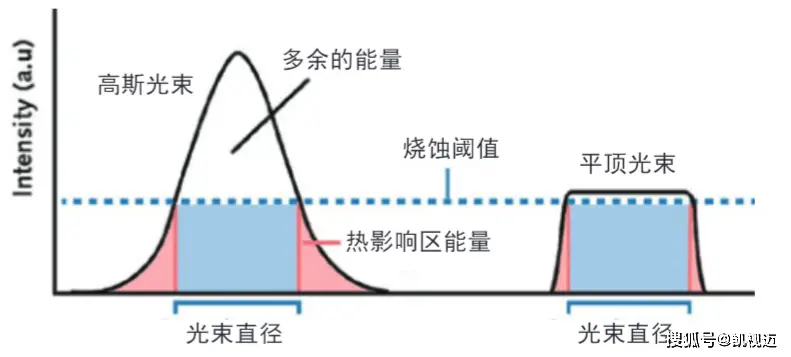
- 反映光束的能量集中度:中心強度高、邊緣衰減的光束(如高斯分布)能量集中;均勻分布的光束(如平頂光束)能量分散。
- 決定光束與物質相互作用的特性:如切割深度、焊接熔寬、粒子囚禁效率等。
1.2、理論模型:常見光束強度分布類型
1. 高斯分布(TEM??模)
數學表達式:
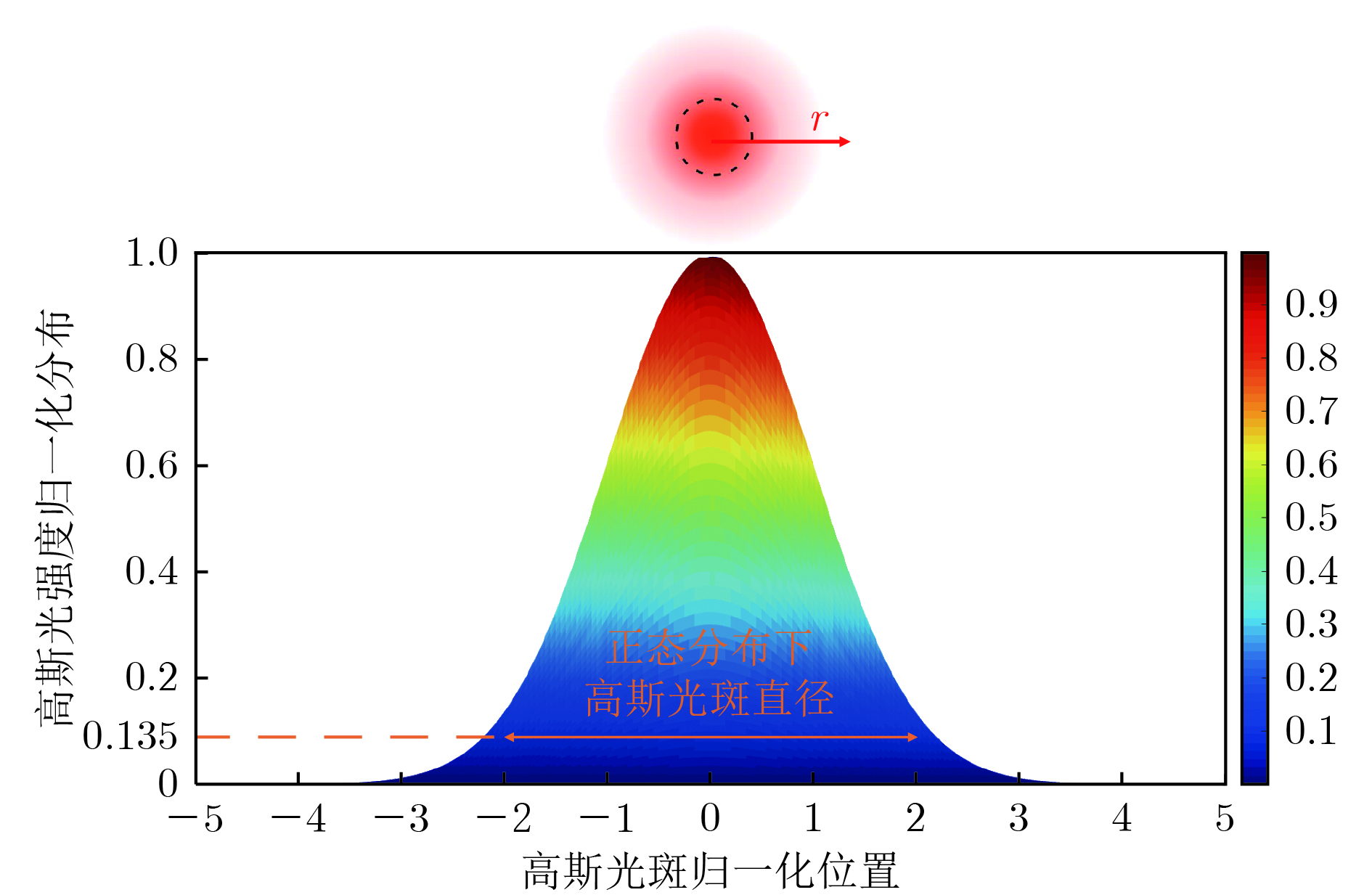
I(r)=I0?exp(?w02?2r2?)
其中:
- I0??為束腰中心光強,
- w0??為束腰半徑,
- r?為徑向坐標。
- 特點:
- 強度隨半徑平方指數衰減,邊緣光強趨近于零。
- 能量集中在中心區域(約95%能量在?2w0??直徑內)。
- 適用于單模激光(如He-Ne激光、光纖激光器基模輸出)。
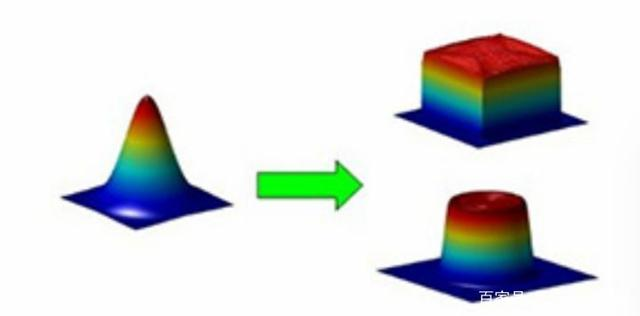
2. 平頂分布(Top-Hat Profile)
數學表達式:
I(r)={I0?0?if?r≤Rif?r>R?
其中?R?為光束半徑。
- 特點:
- 強度在中心區域均勻,邊緣銳截止。
- 能量利用率高(無邊緣衰減),但實際中難以實現完全平頂。
- 適用于激光加工(如均勻切割、焊接)和光學鑷子。
3. 環形分布(Doughnut Profile)
數學表達式:
I(r)=I0??w02?r2?exp(?w02?r2?)
(拉蓋爾-高斯模的特例)
- 特點:
- 中心光強為零,強度在環形區域最大。
- 適用于光學渦旋(如軌道角動量光束)和粒子旋轉操控。
4. 多模分布(Higher-Order Modes)
- 數學表達式:
由多個高斯模疊加而成,如厄米-高斯模(矩形對稱)或拉蓋爾-高斯模(圓柱對稱)。
例如,TEM??模:
I(x)∝x2exp(?w02?2x2?)
- 特點:
- 強度分布出現多峰或復雜結構(如十字形、環形加中心斑)。
- 常見于多模激光器或腔模失配的光束。
1.3、測量方法
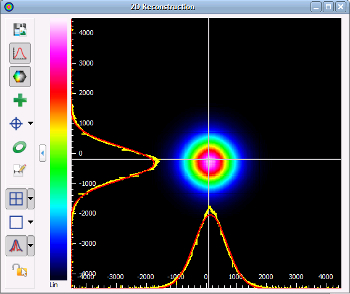
1. CCD/CMOS成像法
- 原理:
- 用相機直接捕獲光束橫截面圖像,通過軟件分析像素灰度值(與光強成正比)。
- 步驟:
- 擴展光束至相機感光面(避免飽和)。
- 采集多幀圖像,取平均值減少噪聲。
- 擬合強度分布曲線(如高斯擬合)。X和Y軸兩個方向。
- 優點:
- 非接觸、實時、可視化。
- 適用于動態光束監測(如光束漂移)。
- 缺點:
- 需校準像素尺寸與實際尺寸的對應關系。
- 高功率光束需衰減片防止相機損壞。
2. 刀口法(Knife-Edge Method)
- 原理:
- 用銳利刀片橫向切割光束,測量光功率隨刀片位置的變化,反推強度分布。
- 步驟:
- 固定激光器,移動刀片逐步遮擋光束。
- 記錄光功率?P?隨刀片位置?x?的變化曲線。
- 對?dP/dx?求導得到強度分布?I(x)。
- 優點:
- 簡單、成本低,適用于高功率光束。
- 可直接測量一維強度分布。
- 缺點:
- 需手動操作,精度受刀片銳度影響。
- 無法直接獲取二維分布(需旋轉刀片多次測量)。
3. 掃描探針法(Scanning Probe Method)
- 原理:
- 用光電探針(如光電二極管)在光束橫截面上掃描,記錄光強隨位置的變化。
- 步驟:
- 固定探針,移動激光器或反射鏡使光束掃描過探針。
- 記錄探針輸出信號隨時間的變化。
- 轉換為空間分布,擬合強度參數。
- 優點:
- 適用于高功率激光(探針可遠離光束中心)。
- 可測量超快光束(需高速探針)。
- 缺點:
- 機械掃描速度慢,可能引入振動誤差。
- 需精確控制掃描路徑。
1.4、影響因素
- 激光模式:
- 單模激光(TEM??)為高斯分布,多模激光為復雜分布(如多峰、環形)。
- 模式純度越高,強度分布越接近理論模型。
- 光學元件損傷:
- 高功率光束中,光學元件(如透鏡、鏡片)的損傷可能導致強度分布畸變(如中心凹陷)。
- 像差與波前畸變:
- 透鏡像差(如球差、色差)會破壞高斯分布的對稱性。
- 自適應光學可校正波前畸變,優化強度分布。
- 非線性效應:
- 高功率下,克爾效應或自聚焦效應可能改變強度分布(如光束自收縮或分裂)。
1.5、應用場景
- 激光加工:
- 切割/焊接:高斯分布光束的能量集中,適合精細加工;平頂分布光束適合大面積均勻處理。
- 鉆孔:環形分布光束可實現高深徑比微孔加工。
- 光學測量:
- 干涉儀:強度分布均勻性影響干涉條紋對比度。
- 全息術:平頂分布光束可提高全息圖信噪比。
- 生物醫學:
- 光學鑷子:高斯分布光束用于囚禁微粒;環形分布光束用于旋轉操控。
- 光熱治療:強度分布決定組織加熱區域(如腫瘤靶向治療)。
- 量子光學:
- 冷原子實驗:高斯分布光束的強度梯度用于磁光阱中原子冷卻與囚禁。
- 光子糾纏:強度分布影響雙光子干涉可見度。
1.6、實際案例:高斯光束強度分布的測量與驗證
案例1:He-Ne激光器(632.8 nm)
- 測量步驟:
用擴束鏡將光束擴展至CCD感光面(直徑約5 mm)。
采集圖像并擬合高斯曲線:
I(r)=I0?exp(?w02?2r2?)
- 測得束腰半徑?w0?=150μm,中心光強?I0?=10mW/cm2。
- 驗證:
計算理論發散角:
θ=πw0?λ?=π×150×10?6632.8×10?9?≈1.35mrad
- 與實際測量發散角(1.4 mrad)吻合,驗證高斯分布假設。
案例2:光纖激光器平頂光束生成
- 方法:
- 在光纖激光器輸出端插入衍射光學元件(DOE),將高斯分布轉換為平頂分布。
- 效果:
- 平頂光束直徑?2R=1mm,邊緣銳度 < 5%。
- 應用于太陽能電池焊接,熔寬均勻性提升30%。
二、TEM??基模或多模
TEM??基模和多模是激光光束的兩種基本模式類型,它們在光束特性、應用場景及測量方法上存在顯著差異。以下是詳細解析:
2.1、TEM??基模:理想高斯光束
1. 定義與特性
- 模式定義:TEM??(Transverse Electromagnetic Mode)是激光諧振腔中最低階的橫模,其電場和磁場在橫截面上呈高斯分布,無任何節點或暗環。
- 核心特性:
- 光束強度分布:中心強度最高,向邊緣呈指數衰減,形成典型的高斯輪廓。
- 光束寬度:在束腰處(最小截面)的光束直徑最小,且沿傳播方向按雙曲線規律發散。
- M2因子:理論上M2=1(實際因光學元件缺陷可能略大于1),表示光束質量接近理想。
- 相位分布:波前為平面波(在束腰處)或球面波(遠離束腰),相位畸變極小。
2. 優勢與應用
- 優勢:
- 高聚焦性:可聚焦到極小光斑(如衍射極限光斑),適用于高精度加工。
- 低發散角:長距離傳輸時能量集中,減少損耗。
- 穩定性高:模式純凈,抗干擾能力強。
- 典型應用:
- 激光切割/焊接:高能量密度實現精密加工(如薄板切割、微焊接)。
- 激光打標:生成清晰、高對比度的標記。
- 光學測量:作為標準光束校準光學系統。
- 科研領域:如冷原子實驗、量子光學研究等。
3. 測量與評估
- 光束質量分析儀:
- 強度分布測量:通過CCD或CMOS相機捕獲光束橫截面圖像,擬合高斯曲線計算束腰直徑。
- M2因子測試:沿光束傳播方向多點測量束腰直徑與發散角,計算M2值(越接近1越好)。
- 波前傳感器:檢測相位分布,確認無顯著畸變。
2.2、多模:復雜光束的混合態
1. 定義與特性
- 模式定義:多模指光束中同時存在多個橫模(如TEM??、TEM??、TEM??等)的疊加,形成復雜強度分布。
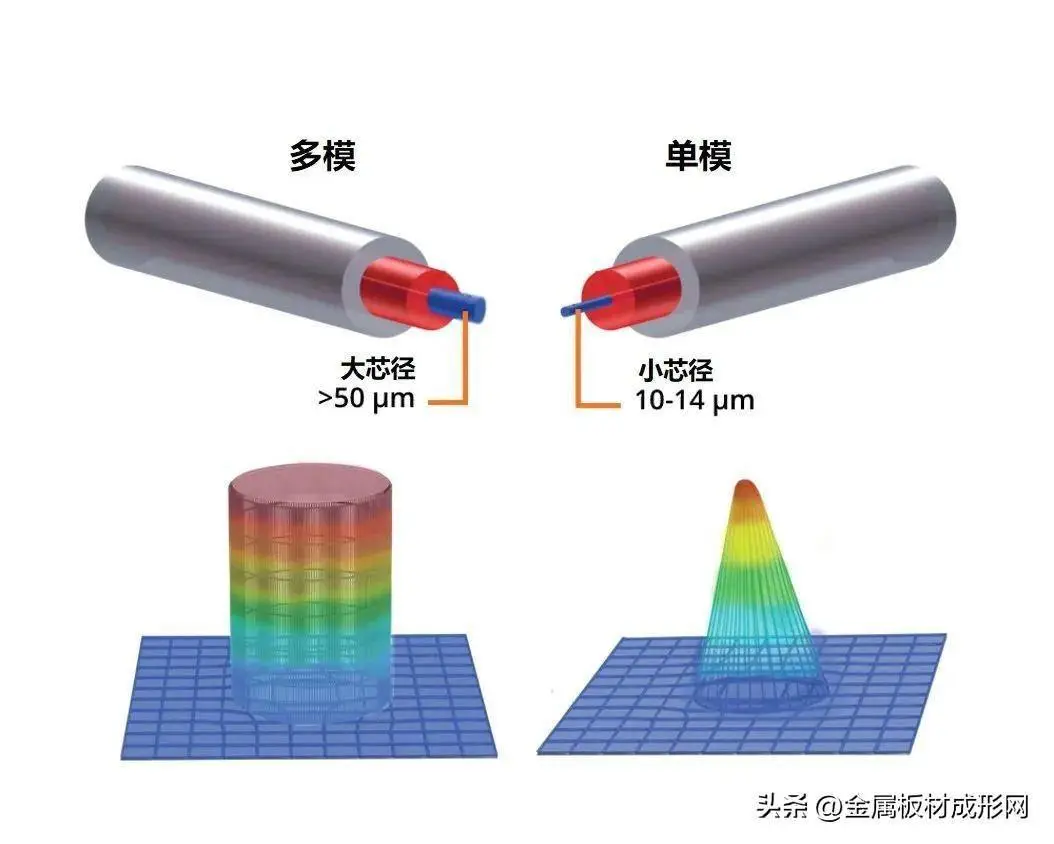
- 核心特性:
- 光束強度分布:中心可能存在多個峰值或暗環,輪廓不規則(如平頂分布、環形分布等)。
- 光束寬度:束腰直徑通常大于同功率的TEM??模,且發散角更大。
- M2因子:M2>1(數值越大表示光束質量越差,越遠離理想的高斯光束TEM??),因模式混合導致能量分散。
- 相位分布:波前存在顯著畸變,可能包含像差或高階相位項。
2. 優勢與應用
- 優勢:
- 高功率輸出:多模激光器(如光纖激光器)可通過模式混合提升總功率。
- 均勻能量分布:平頂多模光束適用于大面積均勻加工(如表面處理、涂層固化)。
- 成本較低:多模激光器結構簡單,易于大規模生產。
- 典型應用:
- 激光焊接(厚板):多模光束的較大光斑和深熔池提高焊接效率。
- 激光熔覆:平頂分布實現均勻涂層沉積。
- 材料處理:如激光清洗、表面改性等。
- 醫療美容:如激光脫毛、皮膚再生等(需控制光斑均勻性)。
3. 測量與評估
- 光束質量分析儀:
- 強度分布測量:捕獲光束橫截面圖像,分析模式成分(如通過傅里葉變換分解橫模)。
- M2因子測試:沿傳播方向多點測量,計算綜合M2值(通常>5)。
- 波前傳感器:檢測復雜相位畸變,評估模式混合程度。
- 挑戰:
- 模式分解復雜:需高級算法(如模式匹配法)區分多個橫模。
- 動態變化監測:多模光束可能隨時間或環境變化(如溫度漂移導致模式競爭)。
2.3、TEM??基模與多模的對比總結
| 特性 | TEM??基模 | 多模 |
|---|---|---|
| 強度分布 | 高斯分布(單峰) | 復雜分布(多峰、環形、平頂等) |
| 光束寬度 | 最小(衍射極限) | 較大(模式混合導致) |
| 發散角 | 小(準直性好) | 大(能量分散) |
| M2因子 | ≈1(理想) | >1(通常>5) |
| 聚焦能力 | 極強(可聚焦到微米級) 中心點的能量極高 | 較弱(光斑較大) |
| 功率容量 | 較低(高功率易損壞光學元件) | 高(適合千瓦級激光) |
| 應用場景 | 精密加工、科研、測量 | 厚板焊接、大面積處理、工業制造 |
| 測量難度 | 較低(標準高斯擬合) | 較高(需模式分解算法) |
2.4、選型建議:根據需求選擇模式
- 追求高精度/小光斑:
- 優先選擇TEM??基模激光器(如固體激光器、半導體激光器)。
- 配合光束質量分析儀嚴格監控M2因子,確保模式純凈。
- 需要高功率/大面積加工:
- 選擇多模激光器(如光纖激光器、CO?激光器)。
- 通過光束整形器(如擴束鏡、平頂轉換器)優化能量分布。
- 平衡成本與性能:
- 中低功率應用可考慮部分相干光源(如多模半導體激光器),兼顧成本與效率。
2.5、未來趨勢:模式控制技術
- 自適應光學:
- 通過變形鏡實時補償波前畸變,將多模光束轉換為近TEM??模。
- 模式選擇腔:
- 設計特殊諧振腔結構(如非穩腔、偏振選擇腔),強制輸出單一橫模。
- 相干合成技術:
- 將多個多模激光束通過相位鎖定合成高功率TEM??模光束。
三、核心功能 -?光束寬度(束腰直徑)
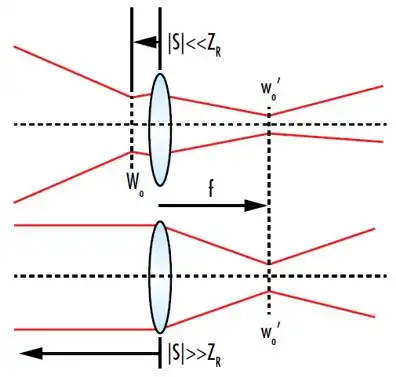
光束寬度(束腰直徑)是描述激光光束在橫截面上最小尺寸的核心參數,尤其在TEM??基模中,它直接決定了光束的聚焦能力、能量密度和傳播特性。
以下是關于光束寬度(束腰直徑)的詳細解析:
3.1、定義與物理意義
- 定義:
- 束腰直徑(Beam Waist Diameter,?2w0?):指激光光束在傳播方向上橫截面最小處的直徑,即光束最細的位置(焦點的位置)。
- 束腰半徑(w0?):束腰直徑的一半,是國際標準中更常用的參數。
- 物理意義:
- 束腰是光束的“聚焦點”,其尺寸決定了光束的能量集中度。
- 在束腰處,光束的發散角最小,波前為平面波(理想情況下),是光束質量評估的關鍵參考點。
3.2、TEM??基模中的束腰直徑
- 高斯光束特性:
- TEM??模的光束強度呈高斯分布,束腰處的光強最大,向邊緣按指數衰減。
- 束腰直徑是光束的“最小可實現尺寸”,受衍射極限限制。
- 計算公式:
束腰半徑?w0??與激光諧振腔參數的關系:
w0?=πλL???g1?+g2??2g1?g2??g2???
其中: |
- $\lambda$ 為激光波長, |
- $L$ 為諧振腔長度, |
- $g_1, g_2$ 為諧振腔的幾何參數($g_i = 1 - \frac{L}{R_i}$,$R_i$ 為腔鏡曲率半徑)。 |
簡化公式(對稱共焦腔):
w0?≈πλL??
此時束腰位于諧振腔中心,尺寸最小。 |
3.?實際測量中的近似:
- 通過光束質量分析儀測量光束強度分布,擬合高斯曲線,直接讀取束腰直徑(2w0?)。
- 常用方法:刀口法、CCD成像法、移動探針法等。
3.3、束腰直徑的影響因素
- 激光波長(λ):
- 波長越長,束腰直徑越大(衍射效應增強),波長越小,粒子性越強,束腰直徑越小。
- 例如:CO?激光(10.6 μm)的束腰通常比Nd:YAG激光(1.06 μm)更粗。
- 諧振腔設計:
- 腔長(L):腔長越長,束腰直徑越大(光束有更多空間發散)。
- 腔鏡曲率(R):曲率半徑越小,束腰越細(光束被更強聚焦)。
- 模式選擇元件:如孔徑光闌、偏振片可抑制高階模,維持TEM??模的細束腰。
- 光學元件損傷:
- 高功率激光中,光學元件(如透鏡、鏡片)的損傷閾值限制了束腰的最小尺寸。
- 束腰過細會導致局部功率密度過高,可能損壞元件。
3.4、束腰直徑的測量方法
- 刀口法(Knife-Edge Method):
- 原理:用銳利刀片橫向切割光束,測量光強隨刀片位置的變化,擬合高斯曲線確定束腰。
- 步驟:
- 固定激光器,移動刀片逐步遮擋光束。
- 記錄光功率隨刀片位置的變化曲線。
- 擬合曲線得到束腰半徑?w0?。
- 優點:簡單、成本低。
- 缺點:需手動操作,精度受刀片銳度影響。
- CCD成像法:
- 原理:用CCD或CMOS相機捕獲光束橫截面圖像,通過軟件分析強度分布。
- 步驟:
- 將激光聚焦到CCD感光面。
- 采集多幀圖像,取平均值減少噪聲。
- 擬合高斯曲線,計算束腰直徑。
- 優點:非接觸、自動化、可實時監測。
- 缺點:需校準相機像素尺寸與實際尺寸的對應關系。
- 移動探針法(Scanning Probe Method):
- 原理:用光電探針(如光電二極管)在光束橫截面上掃描,測量光強分布。
- 步驟:
- 固定探針,移動激光器或反射鏡使光束掃描過探針。
- 記錄探針輸出信號隨時間的變化。
- 轉換為空間分布,擬合束腰參數。
- 優點:適用于高功率激光(探針可遠離光束中心)。
- 缺點:機械掃描速度慢,可能引入振動誤差。
3.5、束腰直徑的應用場景
- 激光加工:
- 切割/焊接:細束腰(微米級)可實現高精度加工(如半導體晶圓切割)。
- 打標:束腰直徑決定標記線條的粗細(如二維碼的最小尺寸)。
- 光學測量:
- 干涉儀:束腰作為參考光束,其尺寸影響干涉條紋的對比度。
- 全息術:細束腰可提高全息圖的分辨率。
- 科研領域:
- 冷原子實驗:束腰直徑決定原子囚禁區域的體積(如磁光阱的尺寸)。
- 量子光學:束腰與光子模式體積相關,影響光與物質相互作用效率。
3.6、束腰直徑的優化策略!!!!!!!!!!
- 縮短諧振腔長:
- 減少腔長?L?可直接減小束腰直徑(但需平衡腔穩定性)。
- 使用小曲率半徑腔鏡:
- 選擇曲率半徑?R?較小的腔鏡,增強光束聚焦效果。
- 插入模式選擇元件:
- 在腔內放置孔徑光闌或偏振片,抑制高階模,維持TEM??模的細束腰。
- 自適應光學補償:
- 用變形鏡實時校正波前畸變,優化束腰尺寸和形狀。
3.7、實際案例:束腰直徑的計算與測量
案例1:He-Ne激光器(632.8 nm)
諧振腔長?L=30?cm,腔鏡曲率?R1?=R2?=1?m。
計算?g1?=g2?=1?10.3?=0.7。
代入公式:
w0?=π632.8×10?9×0.3???0.7+0.7?2×0.70.7??≈160μm
(注:此例中分母為零,需用更精確的諧振腔理論計算,實際束腰可能更小。)
案例2:光纖激光器(1064 nm)
通過CCD測量束腰直徑為?50μm。
計算發散角:
θ=πw0?λ?=π×25×10?61064×10?9?≈13.5mrad
(發散角與束腰直徑成反比,細束腰導致大發散角。)
四、核心功能 - 發散角
發散角:計算光束遠場發散角,評估光束的準直性。
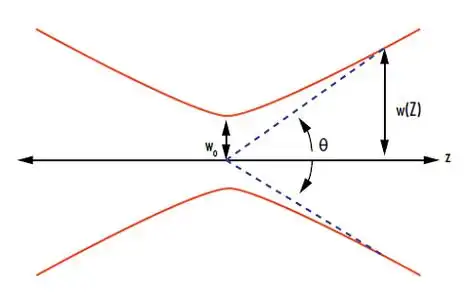
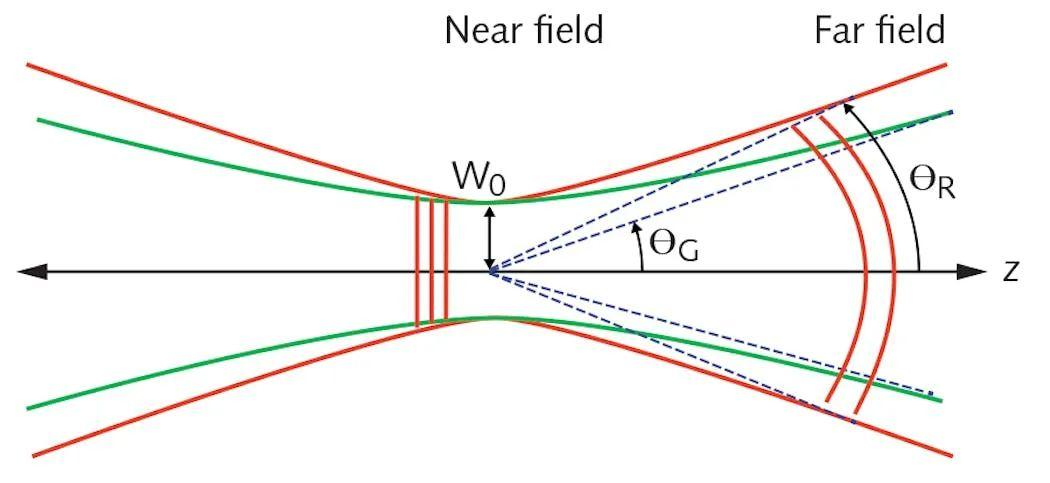
發散角(Divergence Angle)是描述光束在傳播過程中空間擴展特性的關鍵參數,定義為光束遠場(距離光源足夠遠)時,光強下降至中心最大值一定比例(如1/e2或半高寬)處的兩條邊界光線之間的夾角。它是評估激光、LED等光源方向性和能量集中度的重要指標,直接影響光學系統的設計(如聚焦、準直)和應用效果(如通信、加工、測量)。
4.1、發散角的定義與物理意義
- 定義:
數學表達:對于旋轉對稱光束(如高斯光束),發散角?θ?是光束在遠場(z→∞)時,光強下降至中心最大值?I0??的?1/e2(約13.5%)處的半角寬度,即:
θ=z→∞lim?zw(z)?
其中 $w(z)$ 是光束在距離 $z$ 處的半徑。 |
- 幾何意義:發散角越小,光束傳播越接近平行,方向性越好;發散角越大,光束擴散越快。
- 物理意義:
- 能量集中度:發散角小意味著能量更集中于主瓣,適用于遠距離傳輸(如激光通信、測距)。
- 系統設計約束:發散角限制了光學元件(如透鏡、反射鏡)的最小尺寸和焦距選擇。
- 應用適配性:不同應用對發散角要求不同(如激光加工需小發散角實現精細聚焦,照明需大發散角實現均勻覆蓋)。
4.2、發散角的理論模型與計算
1. 高斯光束(TEM??模)
數學表達式:
高斯光束的發散角由束腰半徑?w0??和波長?λ?決定:
θ=πw0?λ?
其中:
- λ?為光波波長,
- w0??為光束束腰半徑(光強最大處半徑)。
- 特點:
- 發散角與束腰半徑成反比:束腰越細,發散角越大。
- 理論最小發散角受衍射極限約束(即無法通過縮小束腰無限減小發散角)。
2. 平頂光束(Top-Hat Profile)
數學表達式:
平頂光束的發散角需通過傅里葉變換或遠場衍射理論計算。近似情況下,若光束直徑為?D,則發散角可表示為:
θ≈Dλ?
(與高斯光束類似,但系數可能因邊緣銳度不同而變化)。
- 特點:
- 平頂光束的發散角通常略大于高斯光束(因邊緣銳截止導致高頻成分更多)。
3. 多模光束
數學表達式:
多模光束的發散角由模式混合決定,通常大于單模光束。例如,對于厄米-高斯模(TEM??),發散角可表示為:
θm,n?=θ0?1+(2m+n?)2?
其中?θ0??為基模(TEM??)發散角。
- 特點:
- 高階模(m+n?越大)發散角越大,光束質量越差。
4.3、發散角的測量方法
1. 遠場法(直接測量法)
- 原理:
在足夠遠的距離?z?處(滿足?z?πw02?/λ),測量光束半徑?w(z),通過?θ≈w(z)/z?計算發散角。 - 步驟:
固定激光器,在遠場放置光屏或CCD相機。
測量光束直徑?D(z)(如通過刀口法或圖像處理)。
計算發散角:
θ=2zD(z)?
- 優點:
- 簡單直接,適用于低功率光束。
- 缺點:
- 需足夠大的測量距離(實驗室空間受限時難以實現)。
- 高功率光束可能損壞探測器。
2. 近場法(通過束腰與波長計算)
- 原理:
利用高斯光束發散角公式?θ=λ/(πw0?),通過測量束腰半徑?w0??和波長?λ?計算發散角。 - 步驟:
- 用CCD或掃描探針測量光束近場強度分布,擬合高斯曲線得到?w0?。
- 已知波長?λ(如通過波長計測量),代入公式計算?θ。
- 優點:
- 無需遠場測量,節省空間。
- 缺點:
- 僅適用于高斯或近似高斯光束。
- 束腰測量精度受探針分辨率限制。
3. 干涉法(高精度測量)
- 原理:
利用干涉儀(如馬赫-曾德爾干涉儀)測量光束的波前曲率,反推發散角。 - 步驟:
- 將光束分為兩束,一束直接傳播,另一束經反射鏡引入路徑差。
- 調整路徑差使兩束光干涉,觀察干涉條紋彎曲程度。
- 通過條紋彎曲量計算波前曲率,進而得到發散角。
- 優點:
- 精度高(可達亞毫弧度級)。
- 缺點:
- 系統復雜,需精密光學元件。
- 對環境振動敏感。
4.4、影響發散角的因素
- 光束模式:
- 單模光束(TEM??)發散角最小,多模光束發散角隨模式階數增加而增大。
- 光學元件像差:
- 透鏡的球差、色差會破壞光束波前,導致發散角增大。
- 自適應光學可校正像差,優化發散角。
- 非線性效應:
- 高功率下,克爾效應或自聚焦效應可能改變光束發散角(如光束自收縮導致發散角減小)。
- 熱效應:
- 光學元件受熱變形(如激光晶體熱透鏡效應)會改變光束參數,影響發散角。
4.5、發散角的應用場景與優化
1. 激光通信
- 需求:小發散角(<1 mrad)實現遠距離傳輸(如衛星間通信)。
- 優化方法:
- 使用單模光纖輸出高斯光束。
- 在發射端加入準直透鏡(如非球面透鏡)壓縮發散角。
2. 激光加工
- 需求:適中發散角(1-10 mrad)平衡聚焦深度與能量密度。
- 優化方法:
- 選擇多模激光器(如CO?激光器)獲得較大發散角,適應粗糙表面加工。
- 使用變焦光束擴束器動態調整發散角。
3. 光學測量
- 需求:極小發散角(<0.1 mrad)提高干涉儀分辨率。
- 優化方法:
- 使用超穩腔激光器(如He-Ne穩頻激光器)輸出低發散角光束。
- 在測量系統中加入空間濾波器(如針孔濾波)凈化光束模式。
4.6、實際案例:高斯光束發散角的測量與驗證
案例1:He-Ne激光器(632.8 nm)發散角測量
- 測量步驟:
用CCD測量近場光束強度分布,擬合高斯曲線得束腰半徑?w0?=150μm。
已知波長?λ=632.8nm,計算理論發散角:
θ=πw0?λ?=π×150×10?6632.8×10?9?≈1.35mrad
在遠場(z=10m)測量光束直徑?D=2.7cm,計算實驗發散角:
θexp?=2zD?=2×100.027?=1.35mrad
- 結論:
理論與實驗結果一致,驗證高斯光束發散角公式。
案例2:光纖激光器發散角優化
- 問題:
多模光纖激光器輸出光束發散角過大(θ=10mrad),導致聚焦光斑尺寸大(d=100μm),無法滿足微加工需求。 - 優化方案:
- 在光纖輸出端熔接單模光纖(模式濾波),將光束轉換為近似高斯分布。
- 加入準直透鏡(焦距?f=100mm),壓縮發散角至?θ′=1mrad。
- 聚焦后光斑尺寸減小至?d′=10μm,滿足加工要求。
- 效果:
發散角降低10倍,聚焦光斑尺寸縮小10倍,加工精度顯著提升。
五、核心功能 -?M2因子
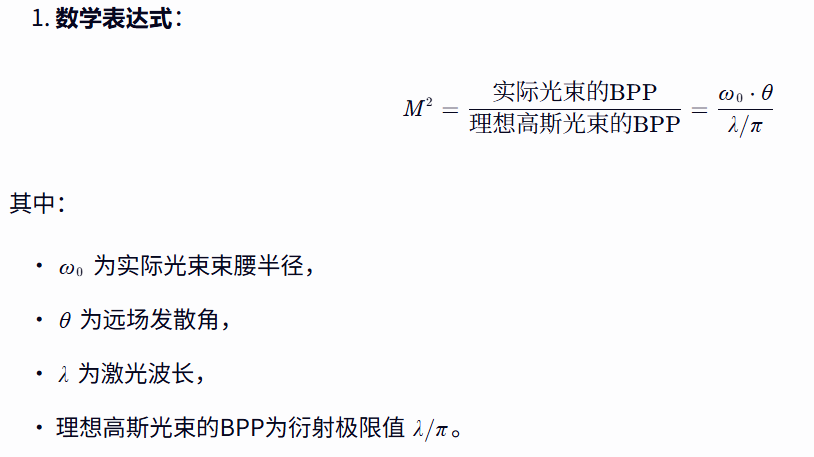
M2因子:量化光束質量,定義為實際光束與理想高斯光束的發散角與束腰直徑乘積之比(M2≥1,越接近1表示光束質量越好)。
M2因子(光束質量因子)是激光領域用于量化激光光束質量的核心參數,定義為實際光束參數乘積(BPP)與理想基模高斯光束參數乘積的比值,其數值綜合反映了光束的發散程度、聚焦性能及傳輸穩定性。以下是關鍵要點解析:
5.1、數學定義與物理意義
- 波長越大,束腰半徑越大;束腰半徑越大,發散性越大。
- 波長越大,發散角越大;發散角越大,發散性越大。
- 束腰半徑越小,發散角越大;反之,束腰半徑越大,發散角越小。
5.2、測量方法與標準
- ISO標準方法:
- 步驟:
- 使用高光學質量透鏡聚焦激光束。
- 在束腰附近(5個位置)和遠場(距離束腰至少一個瑞利長度的5個位置)測量光束寬度(D4σ法)。
- 將10個測量數據擬合到雙曲線模型,計算?M2?值。
- 意義:確保測量結果的一致性和準確性,避免操作誤差。
- 步驟:
- 常用測量技術:
- 相機式直接測量法:
- 設備:光束質量分析儀(如OPHIR BSQ-SP204S)。
- 優點:測量速度快(1分鐘內完成),精度高。
- 局限:需光路衰減,無法直接測量1100nm以上波長。
- 狹縫掃描式測量法:
- 設備:狹縫掃描儀(如OPHIR NANOSCAN系列)。
- 優點:成本低,可直接測量高功率激光器,兼容多波長。
- 局限:搭建復雜,測量速度慢,對操作技能要求高。
- 相位測量法:
- 設備:波前傳感器(如Phasics SID4系列)。
- 優點:直接測量波前相位,精度高,適用于復雜光束。
- 局限:設備成本較高。
- 相機式直接測量法:
5.3、影響因素與優化策略
- 影響因素:
- 光學元件缺陷:如透鏡像差、表面粗糙度。
- 諧振腔設計:腔長、反射鏡形狀及材料質量。
- 環境因素:溫度波動、空氣流動、振動。
- 激光模式:多模光束的?M2?值顯著高于單模。
- 優化策略:
- 元件優化:采用高精度光學加工技術,減少表面缺陷。
- 諧振腔改進:延長腔長、優化反射鏡形狀,提升模式穩定性。
- 環境控制:恒溫恒濕、減震隔離,降低外部干擾。
- 模式選擇:通過空間濾波或模式選擇器抑制高階模。
5.4、應用場景與工程價值
- 工業加工:
- 激光切割/焊接:M2?值越小,聚焦光斑越小,熱影響區越窄,加工精度越高。例如,M2<1.2?的激光器適用于精密微加工。
- 3D打印:高光束質量(M2≈1)可實現層間高分辨率融合。
- 光學通信:
- 光纖耦合:單模光纖要求?M2≤1.1,以降低耦合損耗。
- 自由空間傳輸:低?M2?值可減少大氣湍流引起的光束畸變。
- 激光雷達:
- 測距精度:M2?值越小,光束發散角越小,測距分辨率越高。
- 探測靈敏度:高光束質量可提升回波信號信噪比。
- 科研領域:
- 超快激光:M2?值影響脈沖時空耦合特性,需優化至接近衍射極限。
- 冷原子實驗:高斯光束質量(M2≈1)是實現原子囚禁的關鍵條件。
5.5、局限性與發展趨勢
- 局限性:
- 高能激光:非穩腔輸出的離散能量分布光束可能導致?M2?計算誤差超過20%。
- 超快脈沖:時空耦合效應可能使?M2?無法全面描述光束質量。
- 發展趨勢:
- 多參數綜合評價:結合環圍能量比(BQ值)、斯特列爾比(S)等參數,構建更全面的光束質量評估體系。
- 智能化測量:利用機器學習算法自動優化測量參數,提升數據擬合效率。
- 新型激光器設計:通過拓撲優化諧振腔結構,實現?M2≈1?的高功率激光輸出。
六、波長、發散角、束腰半徑、發散性的關系
波長、發散角、束腰半徑和發散性是描述激光光束傳播特性的核心參數,它們之間通過衍射理論和幾何光學緊密關聯。以下是它們之間關系的系統性解析:
6.1、核心參數定義與物理意義
- 波長(λ):
- 定義:激光的電磁波波長,決定光束的衍射特性。
- 影響:波長越短,衍射效應越弱,光束可聚焦得更細;波長越長,衍射效應越強,光束發散角越大。
- 束腰半徑(ω?):
- 定義:光束橫截面上光強最大處(束腰)的半徑,通常指1/e2強度點。
- 影響:束腰半徑越小,光束聚焦能力越強,但發散角越大;束腰半徑越大,光束準直性越好,但聚焦光斑尺寸受限。
- 發散角(θ):
- 定義:光束遠場(距離束腰足夠遠)的傳播角度,通常指半角全寬(FWHM)或1/e2強度角。
- 影響:發散角越小,光束傳播距離越遠;發散角越大,光束能量擴散越快。
- 發散性:
- 廣義定義:光束在傳播過程中擴散的能力,由發散角和光束能量分布共同決定。
- 量化指標:常用發散角、光束參數乘積(BPP)或M2因子(光束質量因子)表征。
6.2、數學關系:高斯光束理論
對于理想基模高斯光束(M2=1),參數間關系由以下公式描述:
發散角與束腰半徑的關系:
θ=πω0?λ?
- 物理意義:發散角與波長成正比,與束腰半徑成反比。束腰越小,發散角越大;波長越長,發散角越大。
光束參數乘積(BPP):
BPP=ω0??θ=πλ?
- 意義:BPP是衍射極限的標志,實際光束的BPP均大于或等于此值(M2 ≥ 1)。
M2因子與發散性的關系:
M2=理想高斯光束的BPP實際光束的BPP?=λ/πω0??θ實際??
- 意義:M2因子綜合反映了光束的發散性。M2=1表示衍射極限光束,M2>1表示光束質量下降,發散性增強。
6.3、參數間的相互影響與權衡
- 波長與發散角、束腰半徑的權衡:
- 短波長激光(如紫外、可見光):
- 優勢:衍射極限小,可聚焦到更細的光斑(如激光微加工)。
- 局限:材料吸收率高,可能引發熱損傷;大氣散射較強(如紫外激光在空氣中衰減快)。
- 長波長激光(如紅外、CO?激光):
- 優勢:衍射極限大,光束發散角較小,適合長距離傳輸(如激光通信)。
- 局限:聚焦光斑較大,功率密度受限。
- 短波長激光(如紫外、可見光):
- 束腰半徑與發散角的權衡:
- 小束腰半徑:
- 優勢:聚焦光斑小,功率密度高(如激光切割)。
- 局限:發散角大,傳播距離短;對光學元件像差敏感。
- 大束腰半徑:
- 優勢:發散角小,傳播距離遠(如激光雷達準直)。
- 局限:聚焦光斑大,功率密度低。
- 小束腰半徑:
- 發散性與光束質量的關系:
- 高光束質量(M2≈1):
- 特征:發散角接近衍射極限,光束能量集中。
- 應用:精密加工、光學通信、冷原子實驗。
- 低光束質量(M2?1):
- 特征:發散角大,光束能量分散。
- 應用:高功率焊接、材料表面處理(需大光斑覆蓋)。
- 高光束質量(M2≈1):
6.4、實際應用中的優化策略
- 激光加工:
- 需求:高功率密度(小光斑)與低發散角(長焦深)的平衡。
- 策略:
- 選擇短波長激光(如光纖激光器1.06μm)以減小衍射極限。
- 通過透鏡聚焦調整束腰半徑,但需考慮熱透鏡效應(高功率下透鏡材料變形導致ω?變化)。
- 使用空間濾波器抑制高階模,降低M2因子。
- 光學通信:
- 需求:低發散角(長距離傳輸)與小模場直徑(單模光纖耦合)的平衡。
- 策略:
- 采用單模光纖(模場直徑約5-10μm),限制光束為基模高斯分布。
- 通過準直器(大束腰半徑)減小發散角,但需權衡系統體積。
- 選擇1.55μm波長(低損耗窗口)以優化傳輸距離。
- 激光雷達:
- 需求:高分辨率(小發散角)與大探測范圍(高功率)的平衡。
- 策略:
- 采用短脈沖激光(如1550nm光纖激光器)結合小束腰設計以減小發散角。
- 使用波長更短的激光(如532nm綠光)可進一步提升分辨率,但受大氣散射限制。
- 通過光束整形技術(如貝塞爾光束)擴展焦深,降低對發散角的依賴。
6.5、常見誤區與澄清
- 誤區1:束腰半徑越小,光束質量越好。
- 澄清:光束質量由M2因子決定。僅縮小束腰半徑可能增加發散角,導致M2惡化(如多模光束)。需同時優化模式純度。
- 誤區2:波長越短,發散性越弱。
- 澄清:波長影響衍射極限,但發散性還受M2因子、光束能量分布等因素影響。短波長激光若存在高階模,發散性可能更強。
- 誤區3:發散角可無限縮小。
- 澄清:受衍射極限約束,發散角最小值為θ_min = λ/(πω?)。實際光束因M2>1,發散角更大。
6.6、參數關系總結表
| 參數 | 與發散角的關系 | 與束腰半徑的關系 | 與波長的關系 | 對發散性的影響 |
|---|---|---|---|---|
| 波長(λ) | 正比(λ↑→θ↑) | 無直接關系(通過θ間接影響) | 基礎參數,決定衍射極限 | 波長越長,發散性越強 |
| 束腰半徑(ω?) | 反比(ω?↓→θ↑) | 基礎參數,決定聚焦能力 | 無直接關系(通過θ間接影響) | 束腰越小,發散性越強 |
| 發散角(θ) | 基礎參數,表征發散性 | 反比關系(θ↑→ω?↓) | 正比關系(θ↑→λ↑) | 發散角越大,發散性越強 |
| M2因子 | 正比(M2↑→θ_實際↑) | 正比(M2↑→ω?·θ↑) | 無直接關系(通過θ間接影響) | M2越大,發散性越強(光束質量越差) |
七、光束指向性

光束指向性(Beam Pointing Stability)是衡量激光光束在傳播過程中方向穩定性的關鍵參數,直接決定了激光系統在精密加工、光學測量、通信等領域的性能上限。其核心指標包括指向穩定性(短時間抖動)和指向漂移(長時間偏移),通常以角秒(arcsec)或微弧度(μrad)為單位量化。
7.1、光束指向性的物理本質
光束指向性由激光光源、光學系統及環境干擾共同決定,其物理機制可歸納為以下三方面:
- 光源內在因素
- 腔模畸變:激光諧振腔內增益介質不均勻、熱透鏡效應或機械振動會導致腔模變形,使輸出光束方向偏移。
- 模式競爭:多縱模或橫模競爭可能引發光強分布變化,間接影響光束方向。
- 泵浦源噪聲:如半導體激光器的電流波動會通過熱效應傳遞至光束方向。
- 光學系統誤差
- 元件缺陷:透鏡、反射鏡的面形誤差(如PV值超標)會引入波前畸變,導致光束偏折。
- 裝調誤差:光學元件的傾斜、偏心或軸向位移會破壞光路共軸性,引發指向偏移。
- 材料熱變形:高功率激光下,光學元件因吸收熱量產生熱應力,導致面形變化(如透鏡彎曲)。
- 環境干擾
- 機械振動:外部振動通過光學平臺傳遞至光學元件,引發微小位移。
- 溫度波動:材料熱脹冷縮導致光學元件位置或角度變化。
- 空氣湍流:室內氣流或戶外風場引起折射率分布不均,使光束路徑彎曲。
7.2、光束指向性的量化指標
- 指向穩定性(Pointing Jitter)
- 定義:短時間(毫秒至秒級)內光束方向的隨機波動。
- 測量:通過四象限探測器(QPD)或位置敏感探測器(PSD)實時監測光斑位置,計算標準差。
- 典型值:高精度激光系統需達到亞微弧度(<0.1 μrad)級別。
- 指向漂移(Pointing Drift)
- 定義:長時間(分鐘至小時級)內光束方向的緩慢偏移。
- 測量:通過長期監測光斑位置變化,擬合漂移速率。
- 典型值:工業級激光器允許漂移<10 μrad/h,科研級需<1 μrad/h。
- 指向重復性(Pointing Repeatability)
- 定義:多次開關機或循環測試后,光束方向的一致性。
- 測量:記錄多次啟動后的光斑位置,計算最大偏差。
7.3、提升光束指向性的關鍵技術
- 光源優化
- 單頻穩頻激光器:采用PDH(Pound-Drever-Hall)技術鎖定激光頻率,抑制模式競爭。
- 低噪聲泵浦源:使用恒流驅動或溫度控制降低半導體激光器噪聲。
- 熱管理:通過水冷或TEC(熱電制冷)控制增益介質溫度,減少熱透鏡效應。
- 光學系統設計
- 輕量化鏡架:采用碳纖維或銦鋼材料,降低熱膨脹系數。
- 主動補償:集成壓電陶瓷(PZT)或音圈電機,實時調整鏡片角度。
- 離軸設計:避免直通光路中元件熱變形對光束的影響。
- 環境隔離
- 隔振臺:使用空氣彈簧或主動隔振系統隔離機械振動。
- 恒溫腔:將光學系統置于恒溫環境中,控制溫度波動<0.1℃。
- 密封罩:對光學元件進行密封,防止氣流擾動。
- 閉環控制
- 反饋系統:通過QPD監測光斑位置,驅動PZT或快速轉向鏡(FSM)實時校正。
- 前饋控制:結合加速度計或溫度傳感器預測干擾,提前補償。
7.4、典型應用場景與需求
- 半導體光刻
- 需求:EUV光刻機需光束指向穩定性<0.1 μrad,以確保掩模版與晶圓對準精度。
- 方案:采用主動隔振+閉環控制,結合高剛性光學平臺。
- 引力波探測
- 需求:LIGO等裝置要求光束指向漂移<1 nrad/√Hz(中頻段),以檢測時空微小扭曲。
- 方案:超低噪聲激光器+多層隔振+真空環境。
- 激光雷達(LiDAR)
- 需求:自動駕駛LiDAR需指向重復性<10 μrad,以保證測距準確性。
- 方案:MEMS微鏡掃描+溫度補償算法。
- 精密加工
- 需求:深紫外激光切割需指向穩定性<1 μrad,以避免加工邊緣毛刺。
- 方案:閉環控制+防潮封裝(如CLBO晶體系統)。
7.5、未來趨勢:亞微弧度時代的技術突破
隨著量子計算、光子芯片等前沿領域對激光精度要求的提升,光束指向性技術正朝以下方向發展:
- 超穩激光器:結合光學參考腔與原子躍遷線,實現飛秒級時間抖動與亞納弧度級指向穩定。
- 智能光學系統:利用機器學習算法預測并補償復雜環境干擾。
- 集成化設計:通過光子芯片技術縮小光學系統體積,降低熱與機械噪聲。
光束指向性作為激光技術的“方向標”,其優化不僅依賴單一技術突破,更需光源、光學、控制、材料等多學科協同創新。未來,隨著亞微弧度級指向控制技術的成熟,激光將進一步解鎖微觀世界與宏觀應用的極限潛力。


















從入門到精通!第八天(Vue框架及其安裝)(完結篇) 重點 ! ! !)
 · DockerHub鏡像加速全面指南)