第一部分:出現背景
在 Swin Transformer 出現之前,計算機視覺(Computer Vision, CV)領域主要由 CNN (卷積神經網絡) 主導。后來,NLP(自然語言處理)領域的 Transformer 模型被引入 CV,誕生了 ViT (Vision Transformer)。
ViT 做了一件事:它將一張圖片分割成多個“圖塊”(Patches),把這些圖塊當作句子里的“單詞”,然后用標準 Transformer 模型來處理,取得了驚人的效果。
但是,ViT 存在兩個核心問題:
1.計算復雜度過高:
標準的 Transformer 需要計算每個圖塊(Patch)與其他所有圖塊之間的“注意力”,這是一種全局(Global)注意力機制。如果一張圖片有 N 個圖塊,計算復雜度就是 O(N*N)。當圖片分辨率增大時,N 會急劇增加,導致計算量和顯存消耗變得難以承受。
2.缺乏層次化結構:
CNN 的一大優勢是它能通過逐層堆疊(卷積、池化),構建出從低級(邊緣、紋理)到高級(物體部件、整體)的層次化特征。這種金字塔結構對于物體檢測、語義分割等需要多尺度信息的任務至關重要。而 ViT 從始至終都保持著同樣大小的圖塊序列,缺乏這種多尺度的能力。
Swin Transformer 的誕生,就是為了解決 ViT 的這兩個核心痛點。 它的目標是:打造一個既有 Transformer 的強大建模能力,又有 CNN 的高效性和層次化結構優點的通用視覺骨干網絡
注:部分圖示出自論文原文與小綠豆老師的博客
第二部分:網絡整體架構
在探討Swin Transformer 的核心設計之前,我們先看一下他和Vision Transformer(VIT)的不同,這里引用小綠豆老師的博文和圖來進行對比講解:
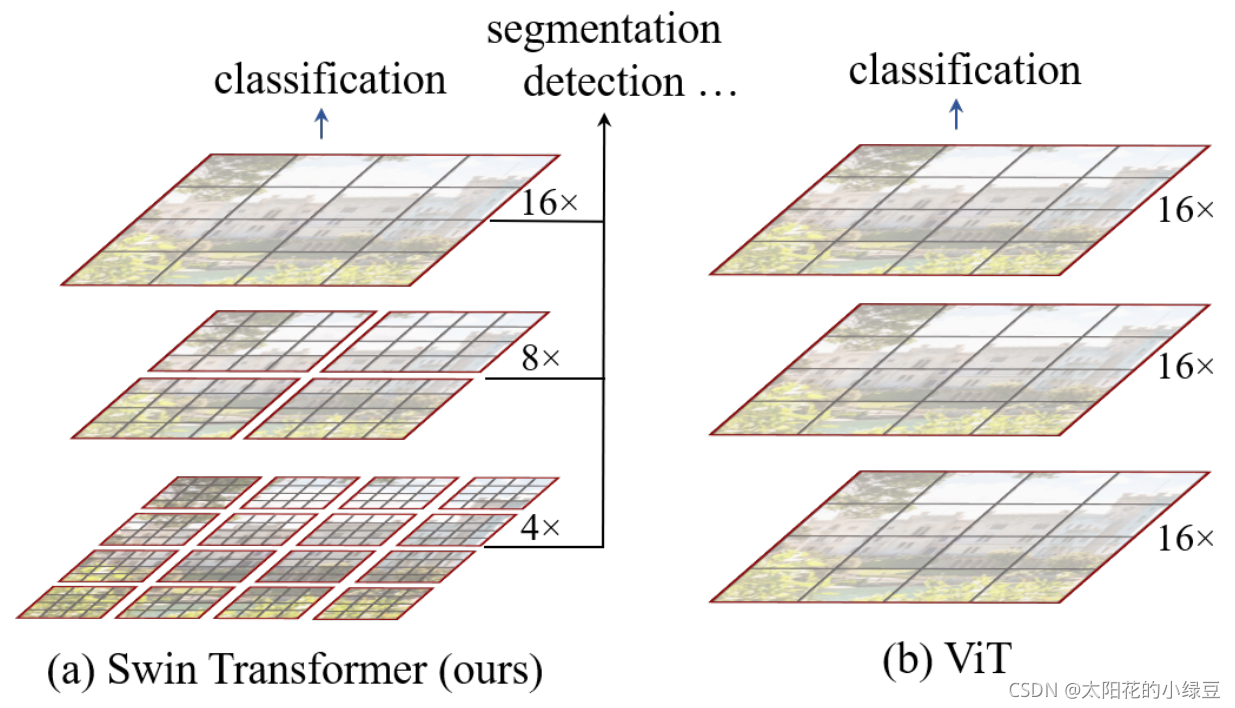
通過對比我們可以看出主要的不同:
Swin Transformer和CNN很類似,分層次構建的特征圖,這樣有助于各種任務的建立,而VIT主要還是比較單一的16倍下采樣。
原論文中給出的關于Swin Transformer(Swin-T)網絡的架構圖:
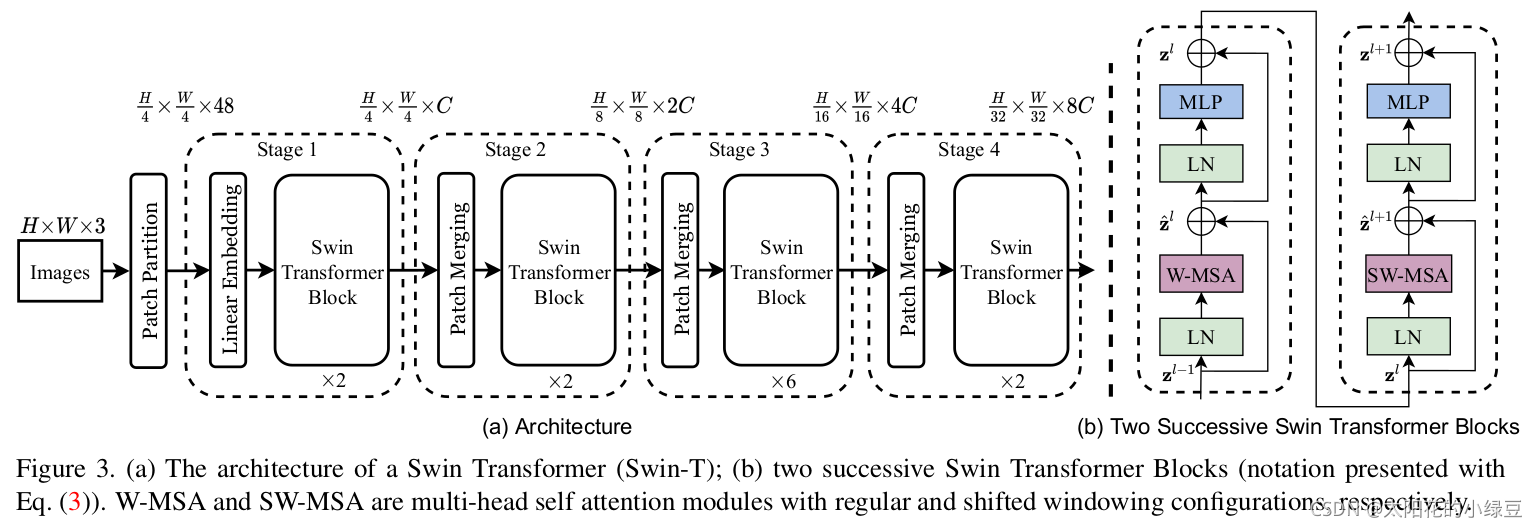
大家先簡單看一下,在后面我會詳細展開講解各個模塊的作用,Swin Transformer 的架構非常有 CNN 的風范,呈現出清晰的層次化結構。
整個網絡主要分為 4 個階段(Stage):
Stage 1: Patch Partition & Linear Embedding
1.輸入:一張 H x W x 3 的 RGB 圖像。
2.操作:
Patch Partition: 像 ViT 一樣切塊,但 Swin 的初始塊非常小,比如 4 x 4 像素。這樣每個圖塊就是一個 4 * 4 * 3 = 48 維的向量。
Linear Embedding: 通過一個線性層,將每個圖塊的維度映射到一個指定的維度 C(例如 96)。
3.輸出:一個大小為 (H/4) x (W/4),通道數為 C 的特征圖。
Stage 2: Swin Transformer Blocks
1.輸入:Stage 1 的輸出。
2.操作:
串聯多個 Swin Transformer Block。這些 Block 成對出現:
第一個 Block 使用 W-MSA,第二個 Block 使用 SW-MSA...如此交替,注意:一定是成對的偶數出現!!!
3.輸出:特征圖大小不變,仍為 (H/4) x (W/4) x C。
Stage 3: Patch Merging & More Blocks
1.輸入:Stage 2 的輸出。
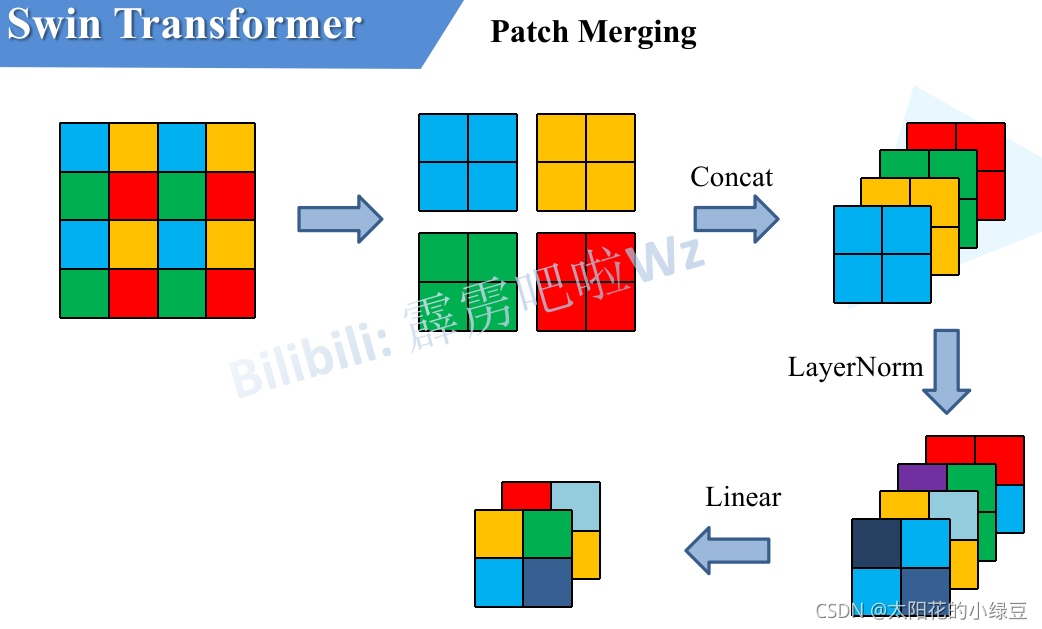
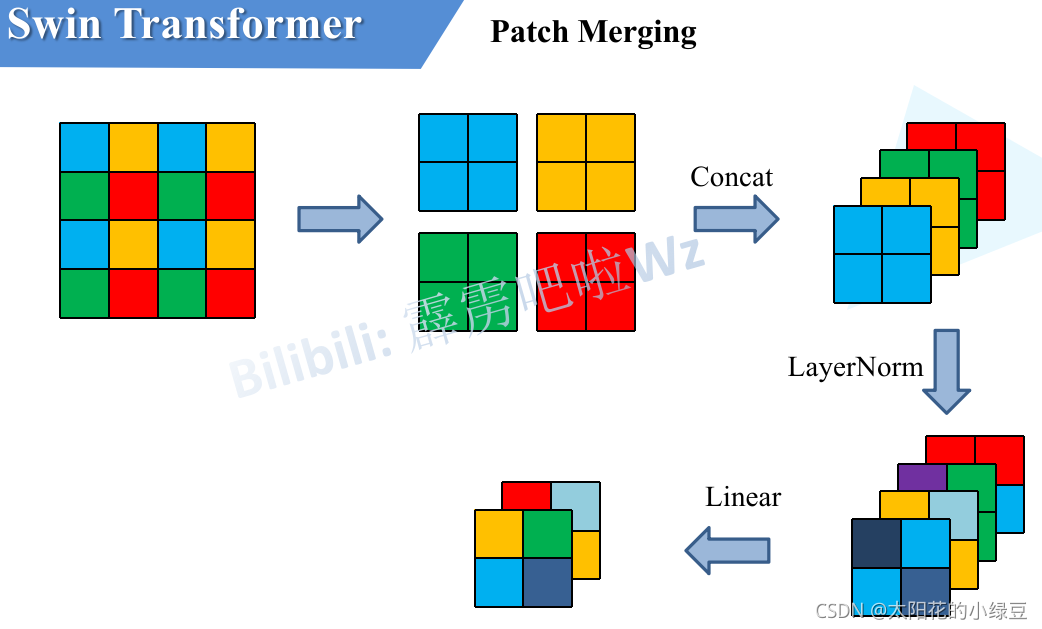
2.操作:Patch Merging (核心步驟):
這是一個下采樣層,作用類似于 CNN 中的池化層。它將特征圖中每 2 x 2 相鄰的四個圖塊拼接(Concatenate)在一起,這樣通道數變為 4C,再通過一個線性層將通道數降為 2C。
我們可以把它看做,一個3x3的正方形網格,網格內像素值為1,對特征圖進行采樣,每次采樣只保留正方形四個角的像素,這樣我們就可以采樣到4個新的特征圖,隨后將這四個新的特征圖拼接到一起,這就是我們的Patch Merging
效果:特征圖分辨率減半 ((H/8) x (W/8)),通道數翻倍 (2C)。這完美復刻了 CNN 的金字塔結構
Swin Transformer Blocks: 再次串聯多個成對的 (W-MSA, SW-MSA) Block,對新的特征圖進行處理。
3.輸出:(H/8) x (W/8) x 2C 的特征圖。
Stage 4 & Stage 5: 重復操作
繼續重復 Patch Merging + Swin Transformer Blocks 的組合。
Stage 4 輸出: (H/16) x (W/16) x 4C 的特征圖。
Stage 5 輸出: (H/32) x (W/32) x 8C 的特征圖
最后,根據具體任務(如圖像分類),在最后一層特征圖后接上全局平均池化層和全連接層進行預測。
第二部分:核心模塊講解
模塊一:窗口化多頭自注意力 (W-MSA)
核心思想:在現實世界中,一個像素點和它周圍的像素點的關系,遠比和圖像另一端的像素點的關系要密切。這是視覺最基本的物理常識。
既然全局注意力的計算量太大,一個自然的想法就是:我們能不能只在一個局部范圍內計算注意力?左邊為VIT的特征圖,需要每個像素去乘以剩下的像素去計算注意力,就是16x16,而右邊的SWIN,僅僅在4個窗口分別計算注意力,就成了4x4x4,一下就減少了這么多,更別提在高分辨率下1920x1080的圖像了,那肯定計算資源減少的更多!
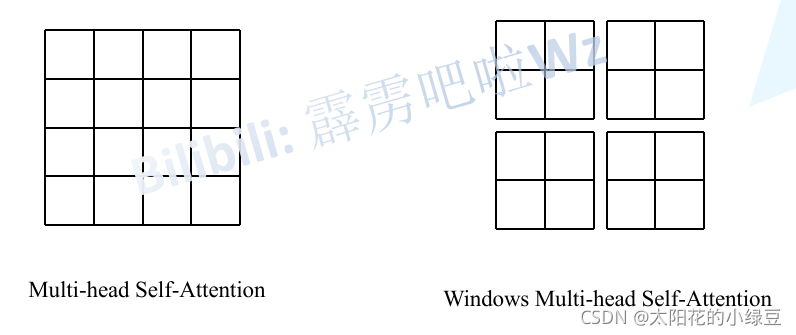
Swin Transformer 正是這么做的。它沒有在整張特征圖上計算注意力,而是:
1.劃分窗口 (Window Partitioning):將特征圖(Feature Map)劃分為多個不重疊的窗口(比如每個窗口大小為 M x M 個圖塊)。
2.窗口內注意力 (Attention within Window):在每個窗口內部獨立地進行自注意力計算。
這樣做的好處立竿見影:
沒有窗口的ViT 的全局注意力復雜度:O((h * w)2)
SWIN:假設特征圖有 h x w 個圖塊,窗口大小為 M x M。
Swin 的窗口注意力復雜度:O(M2 * h * w)
當 M 是一個固定的小常數(如 7)時,計算復雜度就從關于圖塊數量的二次方關系,變成了線性關系!這極大地降低了計算量,使得處理高分辨率圖像成為可能。
但是,新問題來了:每個窗口都像一個信息孤島,窗口之間無法進行信息交流。這樣模型就無法學習到跨越窗口邊界的全局特征。怎么辦?這就引出了第二個核心模塊。
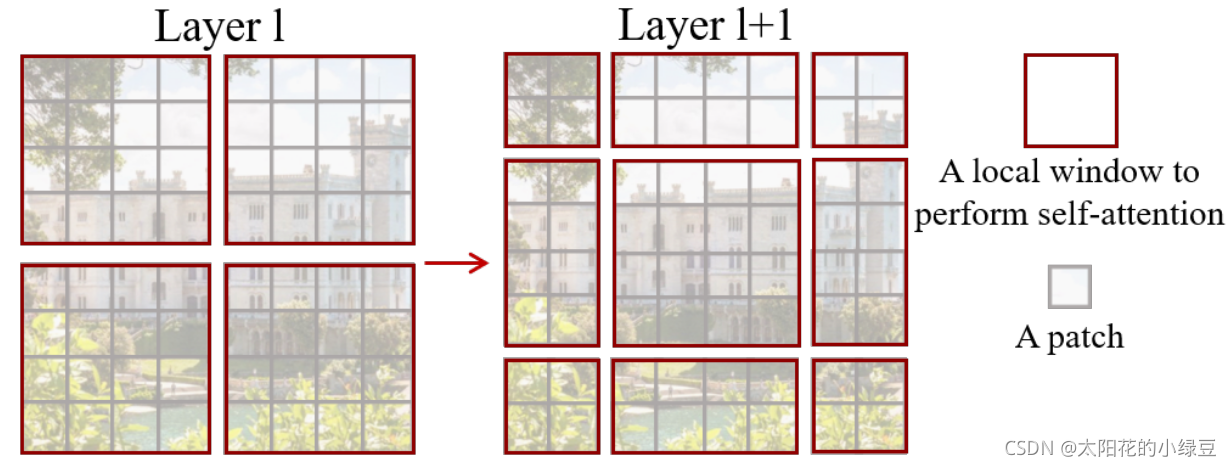
模塊二:“移位窗口”實現跨窗口連接 (Shifted Window Self-Attention, SW-MSA)
為了打破窗口間的壁壘,Swin Transformer 設計了一個絕妙的機制:移位窗口。
它的操作非常天才!:
通過前文的網絡整體架構設計,我們知道W-MSA和SW-MSA一般成對出現,在連續的兩個 Transformer Block 中,它會采用兩種不同的窗口劃分方式:
即:
1.在一個 Transformer Block 中,使用常規的 W-MSA。
2.在下一個連續的 Transformer Block 中,將窗口的劃分方式進行移位(Shift)。具體來說,將窗口向右和向下移動半個窗口的距離,即 (M/2 向下取整, M/2 向下取整) 的距離。這里的M是4,于是我們向下向右移兩個像素,這個簡單的“移位”操作,帶來了神奇的效果。在第 L 層還分屬不同窗口、無法直接對話的圖塊,在第 L+1 層因為窗口的移動,被“劃分”到了同一個新窗口中,從而可以進行信息交互了。
但是!!!如果真的按照移位后的樣子去老老實實計算,會產生更多、大小不一的窗口,從而增加計算量并且難以并行處理。
但 Swin Transformer 的作者用了一個極其聰明的“障眼法”來解決這個問題,這個技巧叫做 循環移位 (Cyclic Shift) + 注意力掩碼 (Masking)。它實現了“跨窗口交流”的效果,卻沒有增加一丁點計算量。所以我一直認為這個作者真的是天才,Swin的架構設計簡直像一種藝術。接下來我來講解一下這個技巧。
第一步:不創建新窗口,而是“滾動”特征圖 它并不真的去切分出那些邊邊角角的小窗口。相反,它把整張特征圖向上、向左進行“循環移位”(可以想象成把最左邊的像素塊移動到最右邊,最上邊的移動到最下邊)。說白了,就是把通過移動特征圖,把圖里不同區域劃分到格子里去。
效果:經過這個“滾動”操作后,原來那些因為移位而產生的零碎小窗口,被神奇地重新拼湊在了一起。最終,我們得到的仍然是和常規 W-MSA 數量相同、大小也完全相同的窗口。這樣計算量就保持不變了!
第二步:解決“亂點鴛鴦譜”的問題 但是,這個“滾動”操作帶來一個新問題:一些原本在圖像中天各一方的區域被硬湊到了一個窗口里,比如最上面的一排像素,滾動到了最下面,這樣他和之前最下面的像素沒啥聯系啊,計算注意力沒必要啊。
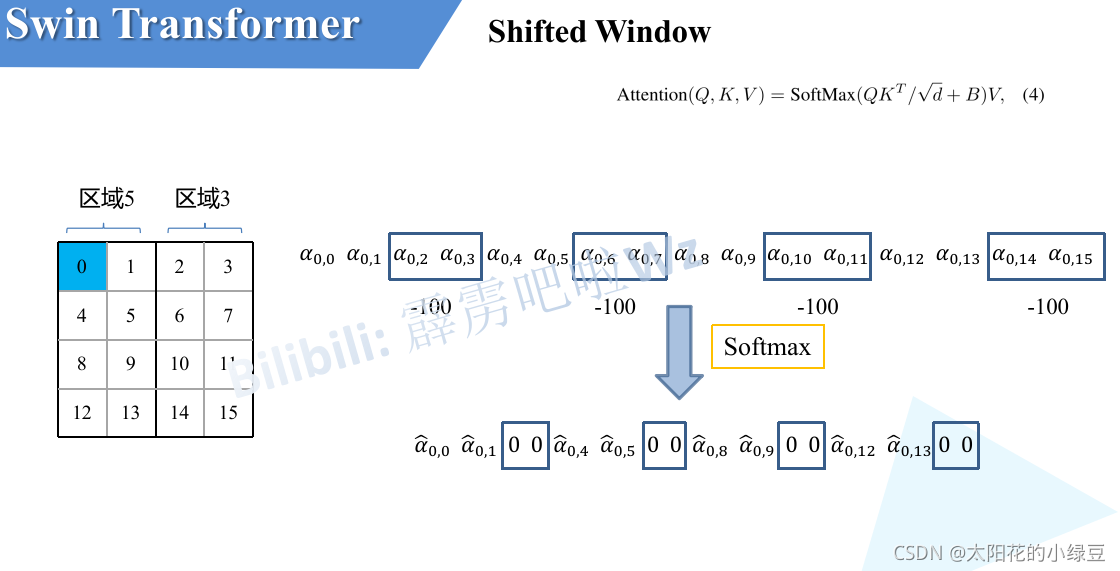
第三步:使用“注意力掩碼” 為了解決這個問題,模型在計算注意力之前,會使用一個“掩碼 (Mask)”。這個掩碼會告訴模型:最下面一排像素和倒數第二排像素的圖塊是硬湊過來的,你們之間不準計算注意力?在計算時,它會給這些不該交流的圖塊組合一個極大的負值(比如 -100),這樣經過 Softmax 之后,它們之間的注意力權重就幾乎為 0 了。
比如,像素0屬于區域5,當像素0計算注意力時,就把區域3內所有像素添加一個-100,這樣就不會計算硬湊的模塊注意力了
第四步:計算完畢,物歸原主 在帶有掩碼的注意力計算完成之后,再把特征圖“反向滾動”回去,恢復到它本來的樣子。
通過?“循環移位 -> 帶掩碼計算 -> 逆向移位”?這一套流程,Swin Transformer 巧妙地在邏輯上實現了跨窗口的信息流動,但在實際計算時,處理的窗口數量和大小從未改變。
模塊三:Patch Merging (圖塊合并)
一、設計的核心動機:為何不直接用 CNN 的池化 (Pooling)?
在深入了解 Patch Merging 的“如何做”之前,我們必須先明白“為什么這么做”。CNN 中最常見的降采樣方法是最大池化 (Max Pooling) 或平均池化 (Average Pooling)。
池化的問題:池化操作非常粗暴。比如最大池化,在一個 2x2 的區域里,它只保留最大的那個值,其他三個值的信息就被完全丟棄了。這是一種不可逆的信息損失。雖然它在早期 CNN 中很有效,但對于需要精細建模的 Transformer 架構來說,這種信息損失是不可接受的。
Patch Merging 的設計:先保留全部,再學習如何提煉。 它認為,2x2 區域內的 4 個圖塊(像素)都包含了有用的信息,我們不應該武斷地扔掉任何一個。正確的做法是,把這 4 份信息完整地“打包”在一起,然后通過一個可學習的網絡層(線性層),讓模型自己去決定如何從這包信息中提煉出最重要的部分。
我們可以把它看做,一個3x3的正方形網格,網格內像素值為1,對特征圖進行采樣,每次采樣只保留正方形四個角的像素,這樣我們就可以采樣到4個新的特征圖,隨后將這四個新的特征圖拼接到一起,再通過一個線性層將通道數降為 2C。
因此,Patch Merging 的本質是一種無損、可學習的降采樣(下采樣)方法。
總結:三大模塊如何協同工作
Swin Transformer 的整個架構就是這三大原則的完美體現:
分階段 (Stage) 設計:網絡被劃分為多個階段,每個階段的最后通過 Patch Merging(原則二)來降低分辨率、加深特征,構建層次。
階段內 Block 設計:在每個階段內部,多個 Transformer Block 成對出現,交替使用 W-MSA(原則一)和 SW-MSA(原則三),在當前尺度下高效地學習局部特征并進行跨窗口的信息融合。
最終,Swin Transformer :
W-MSA先在自己的窗口內學習。
通過SW-MSA跨區域學習,交換關鍵信息。
通過Patch Merging,進行多尺度層次融合
它既有 CNN 的結構效率和層次感,又有 Transformer 的動態關系建模能力,是一個真正集兩者之長的天才杰作。
的 Qt 程序)


是 右Ctrl 鍵(即鍵盤右側的 Ctrl 鍵)筆記250802)

)

腳本)











