在城市配送、應急物資投放和倉儲揀選等場景,人們期待無人機能夠獨立完成“取-運-投”全流程。然而主流多旋翼通常采用下掛式夾爪或機械臂,包裹懸在機體下方,帶來重心下移、轉動慣量增加等問題。為突破這一結構瓶頸,清華大學機械工程系趙慧嬋副教授團隊(Soft Robotics Lab),于今年5月在機器人頂刊The International Journal of Robotics Research 發表論文 “A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。論文提出 “中空四旋翼 + 柔性包覆抓手” 架構,通過將機身中央鏤空為貨倉并在內壁嵌入可充氣硅膠抓手,使質心保持在螺旋槳平面,兼顧穩定飛行與高效抓取,為末端物流提供了一種緊湊、穩健的新方案。
視頻來源:https://www.youtube.com/watch?v=qKxT7bOusKE
01 研究背景
目前,主流的空中抓取系統多采用以下兩種思路:
1. 懸掛式機械臂/夾爪:
常見于空中操作研究,夾爪安裝于無人機底部,抓取動作會導致重心偏移,飛控穩定性下降,且操控復雜。
2. 特種抓取機構
磁吸、吸盤、柔性夾爪等方案在特定目標上成功率高,但對包裹材質和尺寸依賴強,通用性與載重受限。
同時,傳統多旋翼中央艙被飛控、電池等設備占據,貨物只能懸掛,進一步放大質心變化并依賴人工或固定基站裝卸。
-
質心與慣量劇變,削弱姿態穩定性
-
抓取機構-飛控耦合復雜,控制難度高
-
高度依賴人工/基站,難以真正實現端到端自主投遞
02 技術亮點
本研究圍繞無人機空中抓取與投遞過程中的質心控制、抓取適應性與降落容差三大核心難點,提出了一種集中心載荷布局、柔性包覆夾爪與被動載荷引導于一體的高性能飛行平臺,顯著提升了多旋翼在載荷控制、任務適應性與作業效率方面的綜合能力。
中空四旋翼設計
研究團隊提出的Center-less Quadrotor打破傳統“中心-軸臂”布局,采用四旋翼框架圍繞中空載荷艙設計,將載荷直接置于無人機中心。
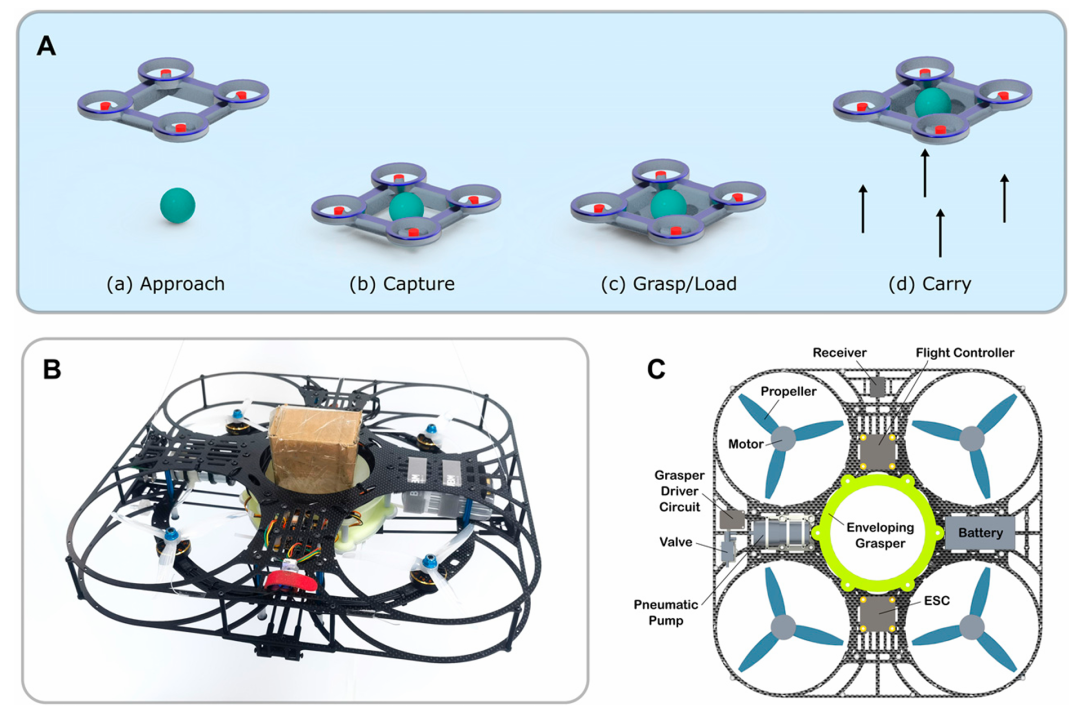
圖片來源:Yu Herng Tan等,《The International Journal of Robotics Research》(2025),論文“A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。
優勢:
1. 保證載荷始終位于無人機重心附近;
2. 減少飛行時的姿態干擾,提升控制一致性;
3. 載荷通過上下通道可自如進出,支持多種作業模式;
4. 動力電池、飛控和電調分別固定在四角梁內,避免了傳統中心艙堆疊造成的散熱、布線與結構沖突。
柔性包覆夾爪
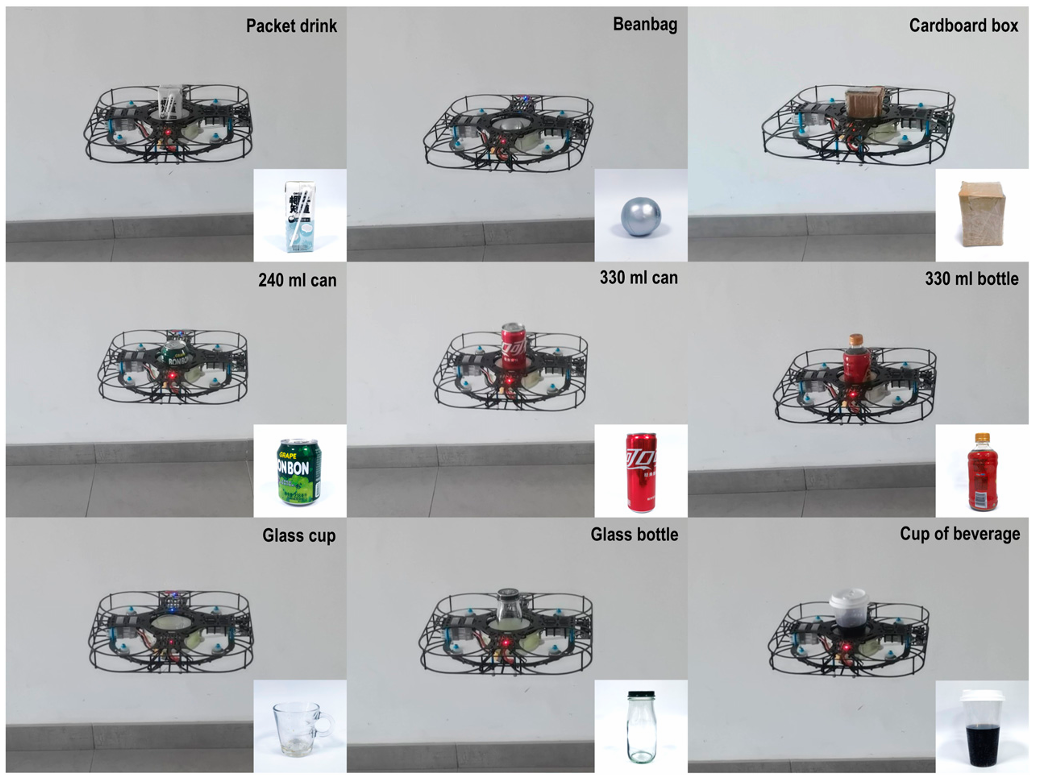
為兼容不同尺寸與材質的包裹,研究團隊在90mm中空貨倉內壁鋪設單腔體硅膠軟套,利用機載氣泵充氣驅動實現全包覆抓取。測試表明,夾爪最大可夾持500g物體,可靠承載高達自重60%的負載。具有如下特點:1. 環形硅膠夾持層,內置氣腔,通氣后向內膨脹包覆目標平均9.8s充滿、5.8s泄氣復位;2. 高適應性:可適應多種尺寸與形狀的物體;3. 高安全性:軟材料減小對物體的擠壓力,適合抓取易碎物。
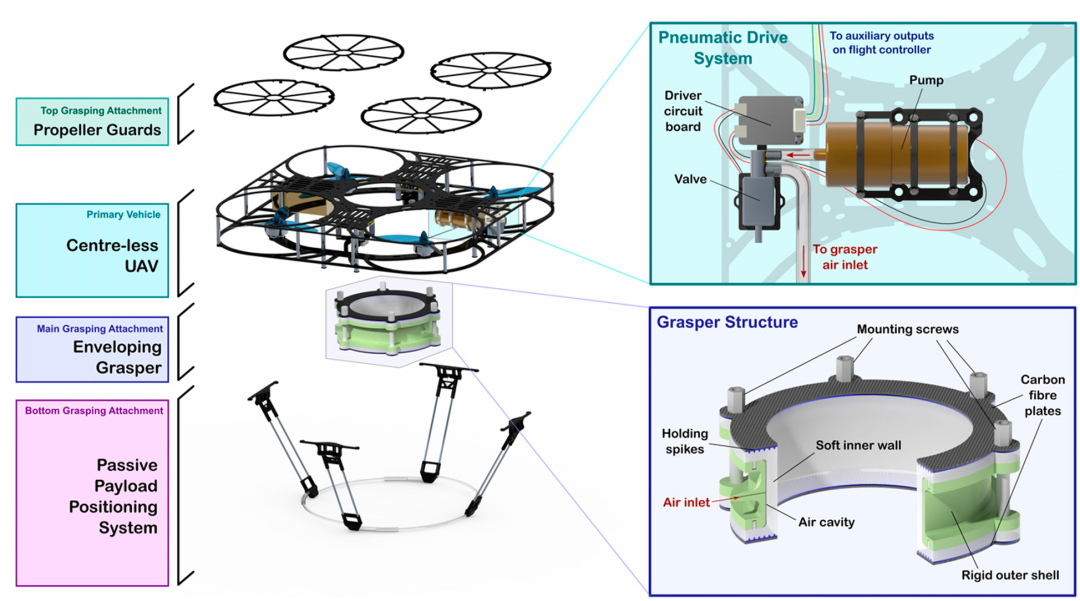
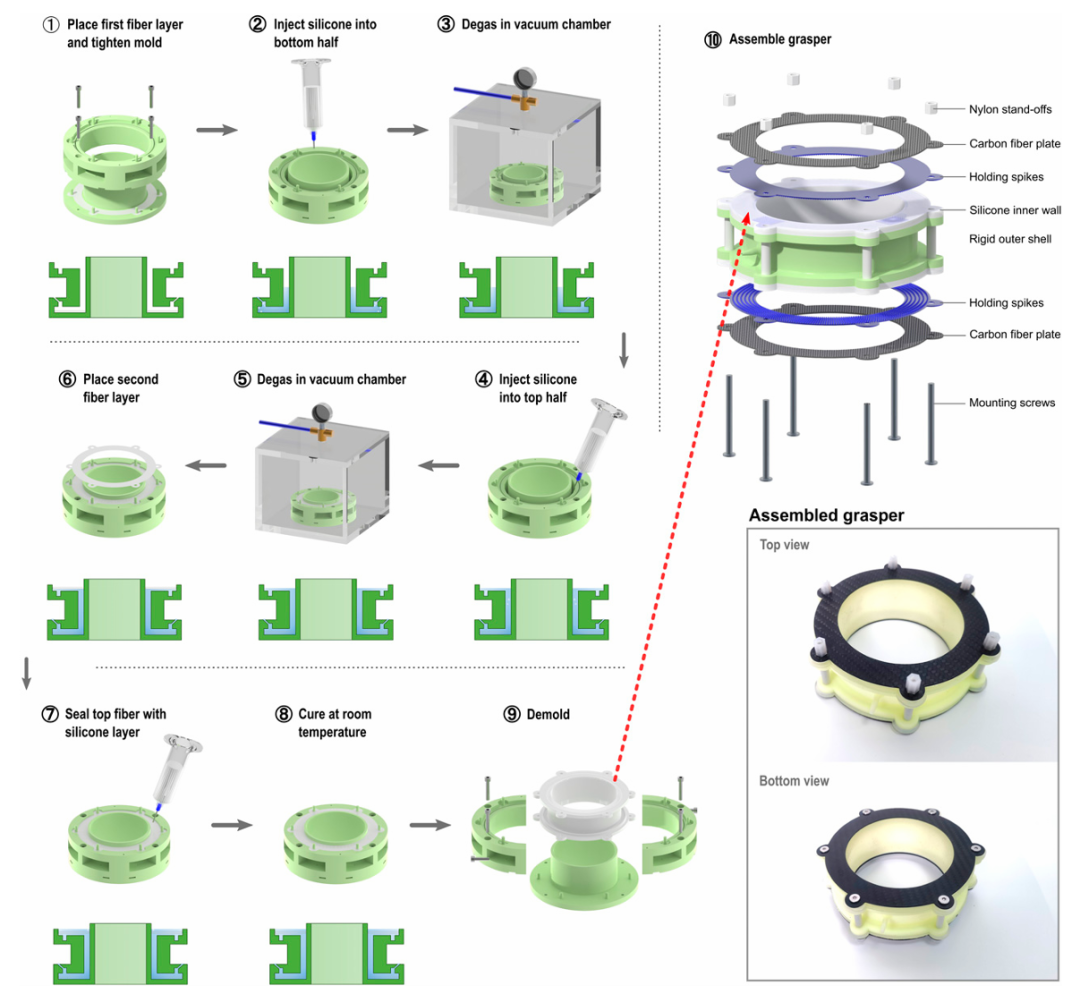
圖片來源:Yu Herng Tan等,《The International Journal of Robotics Research》(2025),論文“A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。
被動載荷引導系統(PPP)
針對抓取時無人機定位誤差的問題,團隊創新性地設計了被動載荷引導系統,在機體下方集成了一個PTFE伸縮環:
- 飛行階段環直徑保持約210mm,形成遠大于抓手的捕獲窗口;觸地瞬間導向環受壓沿滑軌回縮,直徑約為80mm,將包裹順勢推入位于機身中心的柔性抓手;
- 無需電機或傳感器,結構輕量,使有效捕獲面積擴大約6.9 倍,顯著放寬無人機降落定位精度要求并提升自主抓取成功率。
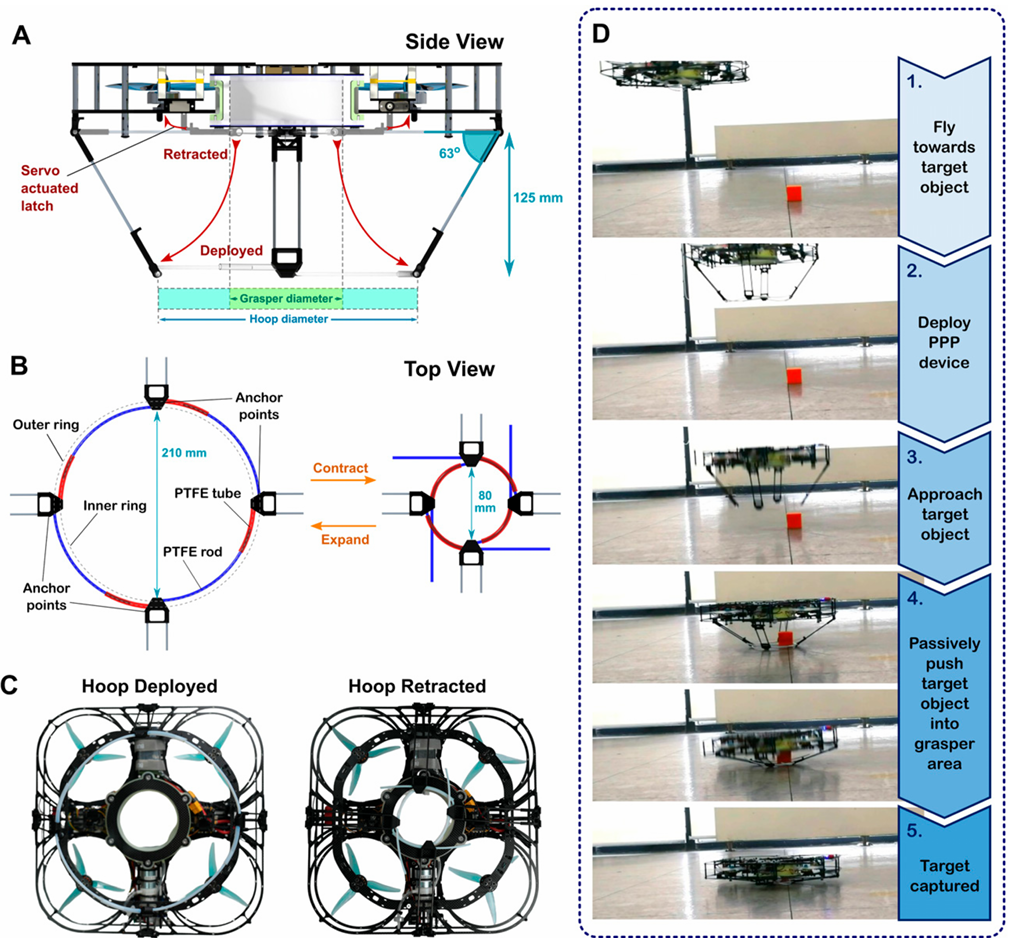
圖片來源:Yu Herng Tan等,《The International Journal of Robotics Research》(2025),論文“A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。
03 實驗測試
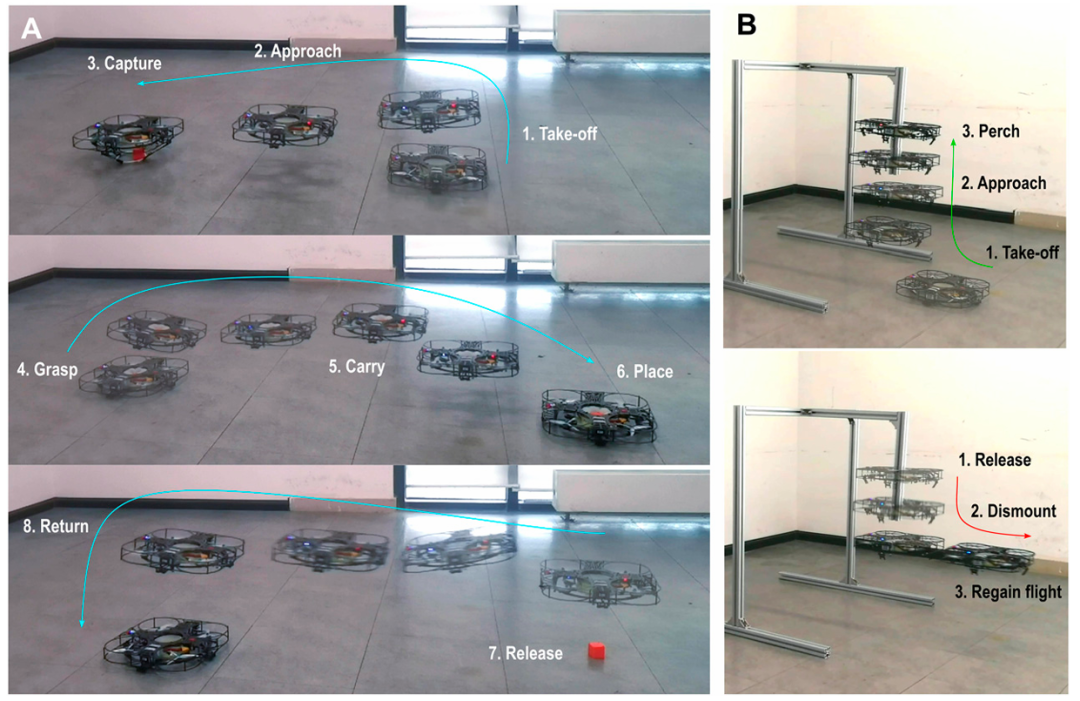
多物體“抓-運-投”演示
無人機搭載柔性夾爪,完成了多種典型物體的抓取飛行測試,目標包括:飲料罐、玻璃杯、軟包裝盒、異形玩具。此外,系統還支持空中倒掛抓取、垂直柱體停靠等擴展功能,具備良好的實用性與拓展潛力。
-
抓取-起飛成功率100%
-
運輸過程中滾/俯仰姿態均方誤差保持 ≤ 0.6 °
-
釋放點水平誤差<5 cm
圖片來源:Yu Herng Tan等,《The International Journal of Robotics Research》(2025),論文“A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。
被動載荷引導測試
團隊測試了被動載荷引導系統(PPP)在自主降落過程中的引導效果。
測試場景
-
無人機降落至目標物體上方,PPP展開后引導物體進入夾爪區域。
-
通過地面反作用力,環形引導器自動收縮,將物體準確送入抓取范圍。
測試結果
-
導向環將捕獲面積擴大約6.9倍,顯著放寬降落定位誤差。
-
無需電機或傳感器,可在一定程度上減輕對高精度環境感知與控制的依賴。
圖片來源:Yu Herng Tan等,《The International Journal of Robotics Research》(2025),論文“A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。
資源速遞
論文鏈接:https://journals.sagepub.com/doi/10.1177/02783649251339772
文章內容僅用于學術交流與技術分享,圖文資料版權歸原作者及期刊所有,如有侵權請聯系刪除。
如果您有感興趣的技術話題,請在留言區告訴我們!關注阿木實驗室,更多技術干貨不斷更新!
開發遇到棘手難題可以上阿木官方論壇:bbs.amovlab.com
有工程師親自解答10000+無人機開發者和你共同進步!


![命令執行漏洞和[GXYCTF2019]Ping Ping Ping](http://pic.xiahunao.cn/命令執行漏洞和[GXYCTF2019]Ping Ping Ping)
![[LeetCode]每日溫度](http://pic.xiahunao.cn/[LeetCode]每日溫度)












)


