1.概述
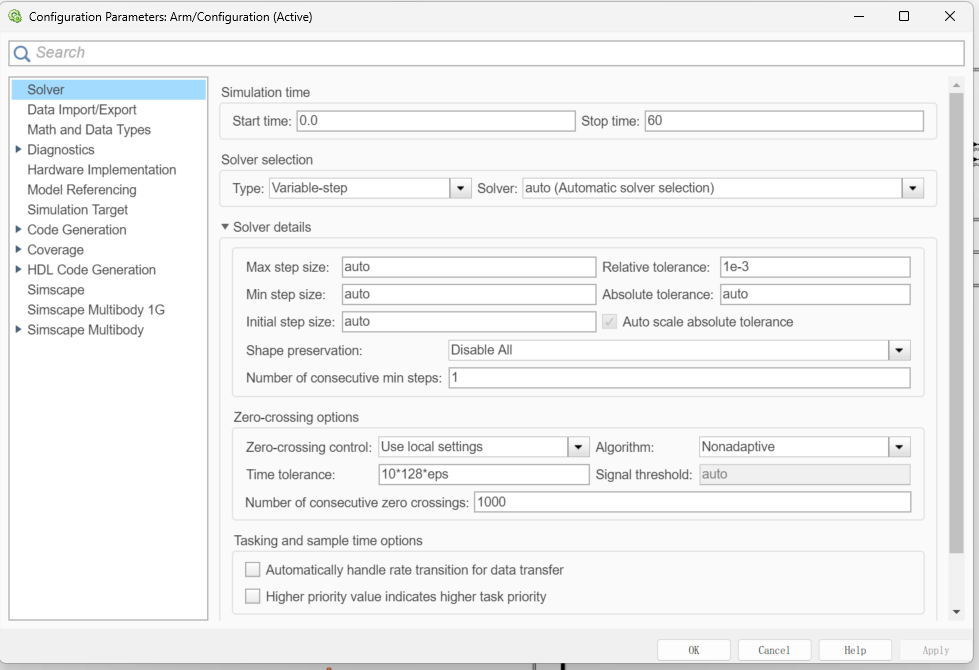
Simulink 的仿真設置(Model Settings)是確保仿真準確性的關鍵配置,主要包括仿真時間、步長、解法器選擇等核心參數的設定。 ?可以通過快捷鍵?Ctrl+E?打開仿真設置界面
2.核心參數
2.1 求解器Solver配置
- 時間范圍:設置仿真開始時間(通常為0)和結束時間(需根據系統動態響應特性調整,如階躍響應超調時間+2倍調節時間)。
- 解法器類型:
- 變步長(Variable-step):適用于非線性、時變系統,支持誤差控制和過零檢測。推薦解法器:
- ode45:默認選項,適用于大多數連續/離散混合系統(非剛性),基于四階/五階龍格庫塔法。
- ode15s:處理剛性系統(特征值差異大),如熱力學模型或電路仿真。
- ode23t:適用于適度剛性系統且需避免數值振蕩的場景(如柔性機械系統)。
- 固定步長(Fixed-step):用于實時系統或硬件在環(HIL)仿真,推薦解法器:
- ode5(對應ode45固定步長版):適用于非剛性系統。
- discrete:純離散系統(如數字控制算法)。
- 變步長(Variable-step):適用于非線性、時變系統,支持誤差控制和過零檢測。推薦解法器:
- 步長參數:
- 變步長:最大步長(Maximum step size)建議設為仿真時間/50(默認),長仿真時間(>15s)需加密采樣(如每秒5-10點)。
- 固定步長:需與模塊采樣時間對齊,避免速率轉換錯誤。
- 誤差控制:
- 相對誤差(Relative tolerance):默認1e-3(0.1%),高精度場景設為1e-4。
- 絕對誤差(Absolute tolerance):默認auto(1e-6),零初始狀態系統需手動調整
2.2 數據I/O(Workspace I/O)配置
- 輸入/輸出管理:
- 使用From Workspace導入MATLAB變量(需包含時間戳,格式如[t, u])。
- 通過To Workspace記錄信號數據至結構體/時間序列(TimeSeries),支持后續MATLAB分析。
- 信號記錄:
- 激活"Log signals to workspace"選項,自動記錄所有示波器(Scope)數據。
- 使用Signal Logging模塊選擇性記錄關鍵信號。
2.3 診斷設置(Diagnostics)
- 速率轉換檢測:
- 多任務模式(Multitasking):檢測模塊間非法速率轉換(如慢模塊直接驅動快模塊),強制插入Unit Delay或Zero-Order Hold。
- 單任務模式(Singletasking):適用于非實時系統,忽略速率轉換錯誤。
- 代數環處理:
- 啟用"Algebraic Loop"警告,優先通過引入中間狀態變量消除環,或設置"Automatically solve algebraic loops using"為"Back-substitution"。
- 過零檢測:
- 對含 discontinuous模塊(如Relay)的系統,啟用"Zero-crossing detection"提高仿真精度
3.優化
3.1 性能調優技巧
- 并行計算:啟用"Enable parallel simulation"(需MATLAB Parallel Computing Toolbox),加速大規模模型仿真。
- 內存優化:關閉非必要信號記錄,使用"Limit data points to last"限制存儲數據量。
- 代碼生成兼容性:固定步長模式下選擇"ert.tlc"(Embedded Coder)模板,確保與生成的C代碼時序一致。
3.2 特殊系統配置
- 混合系統:連續部分使用ode45,離散部分設置固定步長,通過"Multirate Solvers"協調執行。
- 分布式仿真:將模型拆分為子系統,通過"Model Reference"或"Subsystem"并行仿真。
4.典型應用場景
| 場景類型 | 推薦設置 | 典型模塊示例 |
|---|---|---|
| 連續控制系統 | ode45 + 變步長,相對誤差1e-4,最大步長0.1*Td(Td為系統時間常數 | PID控制器、傳遞函數模塊 |
| 電力電子系統 | ode23t + 變步長,過零檢測啟用,離散PWM模塊固定步長1e-6s | SVPWM、IGBT模型 |
| 數字信號處理 | discrete固定步長,與FPGA時鐘同步,啟用"Signal Propagation"診斷 | FFT、FIR濾波器 |
| 剛性系統 | ode15s + 變步長,絕對誤差1e-5,禁用過零檢測(避免頻繁步長調整) | 機器人逆運動學、化學反應器 |


)
















