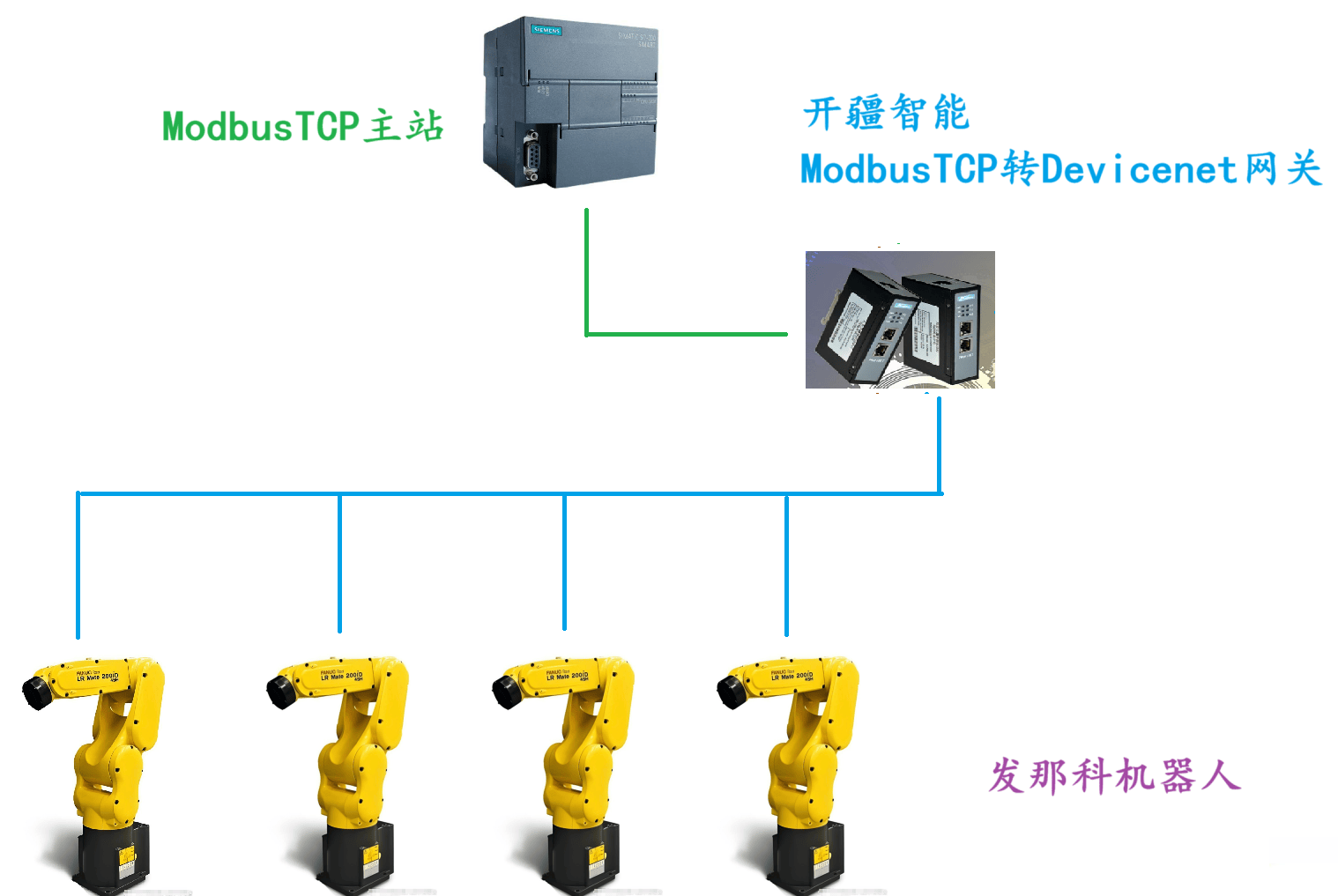
本案例是ModbusTCP主站通過開疆智能ModbusTCP轉Devicenet網關連接發那科機器人的配置案例,操作分為三個配置1:ModbusTCP主站配置2:ModbusTCP轉Devicenet網關配置3:FANUC機器人配置,具體過程如下
配置過程
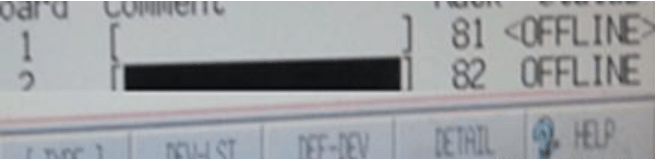
主菜單—IO—Devicenet—如圖1
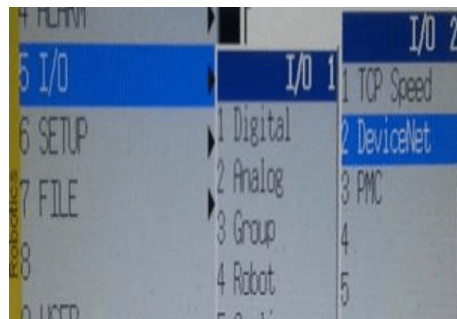
圖1
進入81叢站選項第1項,先關掉通訊設置,OFFLINE,就停止報錯。圖 1-2
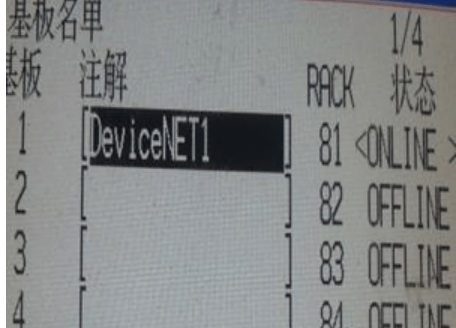
1-2
—按細節進入到圖 1-3
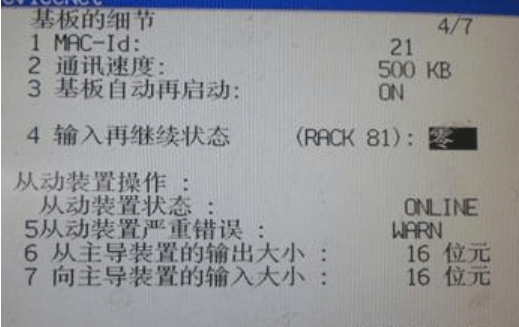
1-3
MAC-ID=叢站號,機器人在PLC里面的第幾個從站,基板自動啟動設為ON, 4: 輸入再繼續狀態設為零。
主菜單如圖1-4—選82基板
圖G-1-1
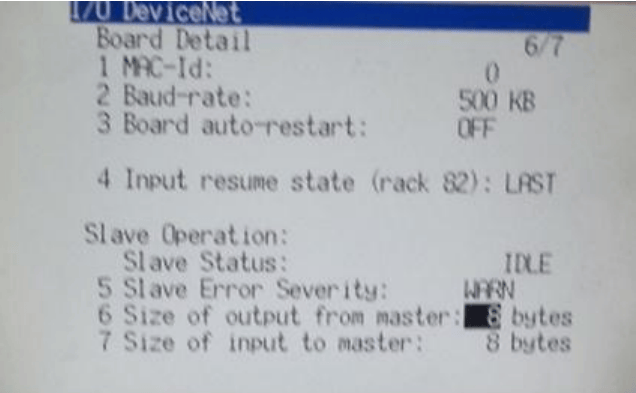
把基板里面的短接換到MASTER里面來進入如圖G-1-1—按F4細節(DETAIL)—進入到G1-1-2畫面MAC-ID站號為0此為主站號所以可以不設, 第2項:通訊訊速度為500KB,3項:基板自動再啟動為OFF。
4:輸入再繼續狀態為零。
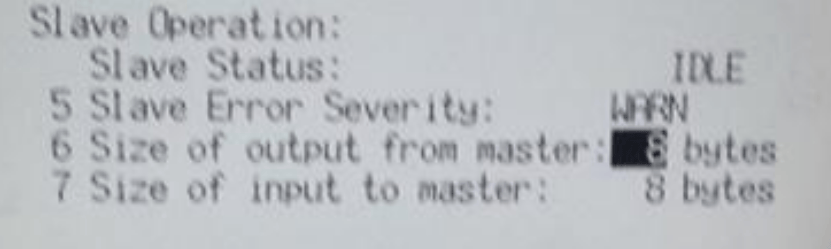
5:叢站裝置嚴重錯誤:WARN
6:從主站輸出為 8位
7:往主站輸入為 8位
設好后退出到G-1-1畫面,線路如果沒問題的情況下是會ONLINE的。

H-1-1
H-1-2
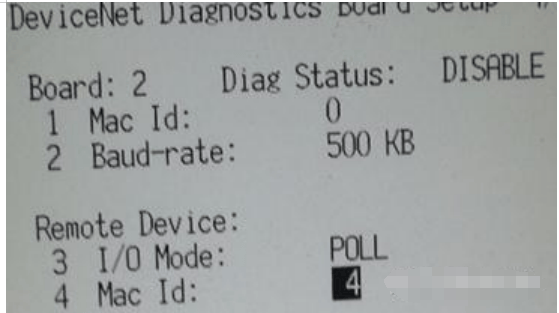
在G-1-1畫面光標移至82基板上,老機器要先把81跟82全部OFF掉才能操作下一步,按翻頁(NEXT)鍵,進入H-1-1畫面—按F3鍵,診斷(DIAG)出現H-1-2畫面1:主站MAC ID 站號為0。 2:Baud-rate:速度為500KB 。
3:I/O mode (IO方式)= POLL(點對點)
4:MAC ID 4 (站號)如是DI輸入模塊拔在第4個站,涂膠機是第1個站輸出模塊為第2個站,3、4為兩個輸入模塊。
模塊有個拔碼,拔在哪就輸入哪個站號去搜索
設好后按 右下的F4搜索,有些新機器人是不
需要在OFFLINE的狀態下搜索的一般模塊與
基板兩端需要裝中央電阻,如線路沒問題是可
以搜索到的。也可以接個小模塊用很短的線來
做試驗收。搜索出來后得到如下畫面下一頁。
i-1-1
搜索出來的結果是,模塊的型號位數都會顯示出來,如 i - 1-1-按F3添加—F4應用,如果有多塊板可以按以上步驟全部搜索出來。
退出到G-1-1畫面光標移到82基板處—按DEV-LST-——進入可以看到搜索到的板,如圖 i-1-2 先OFF掉再返到G-1-1畫面打開81、82基板ONLIN后重新進入到DEV-LST(i-1-2)畫面,再打開小叢站的ON。設置完成重新啟動。
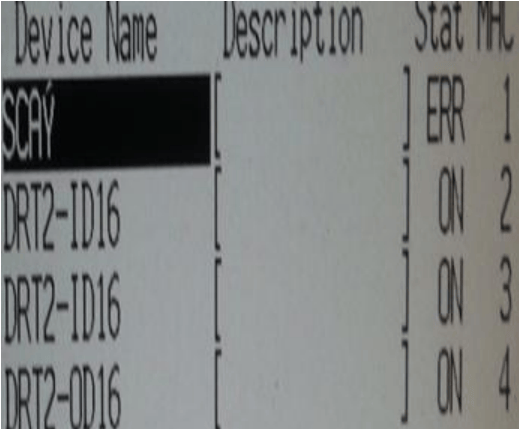
ModbusTCP轉Devicenet網關配置過程
打開網關配置軟件“Gateway Configuration Studio”新建項目選擇TCP-DevicenetM
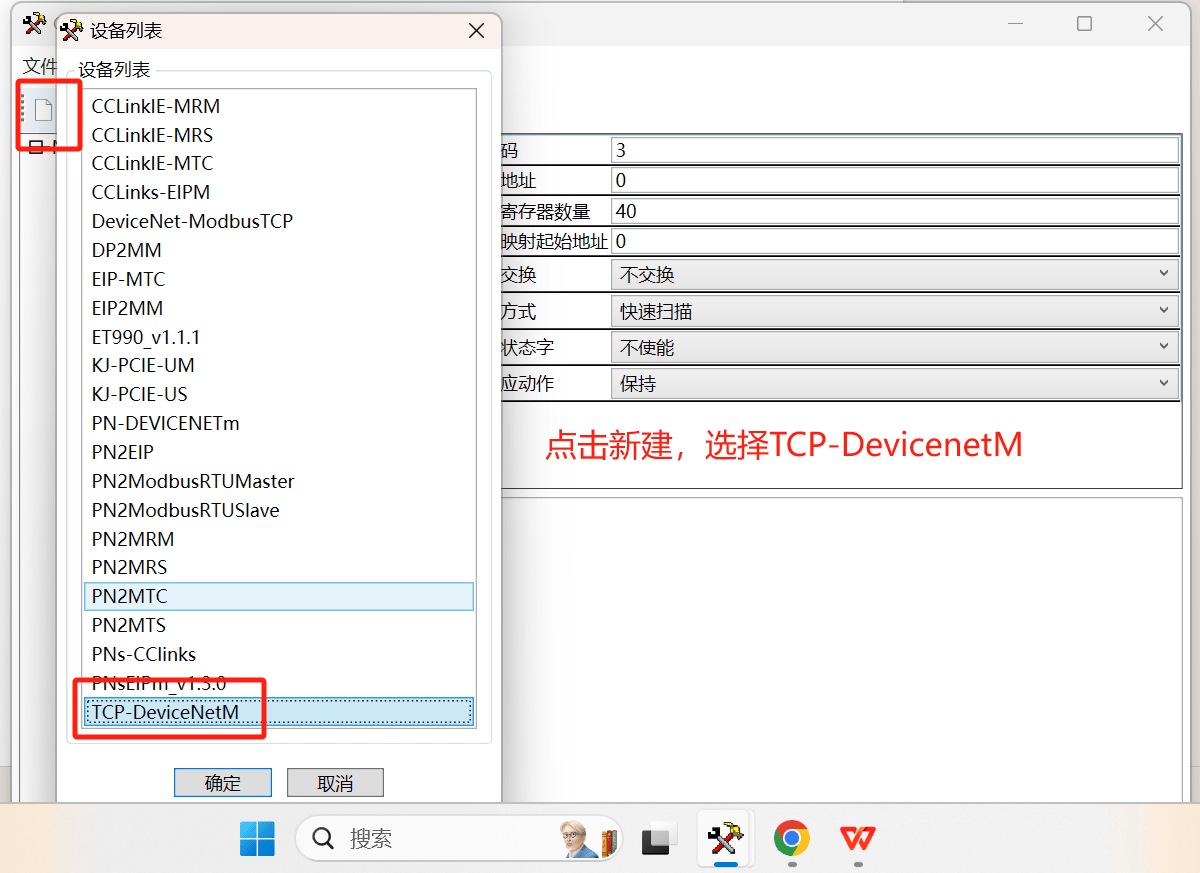
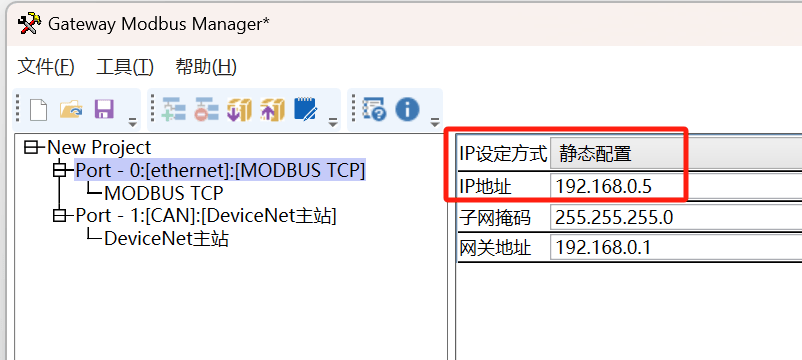
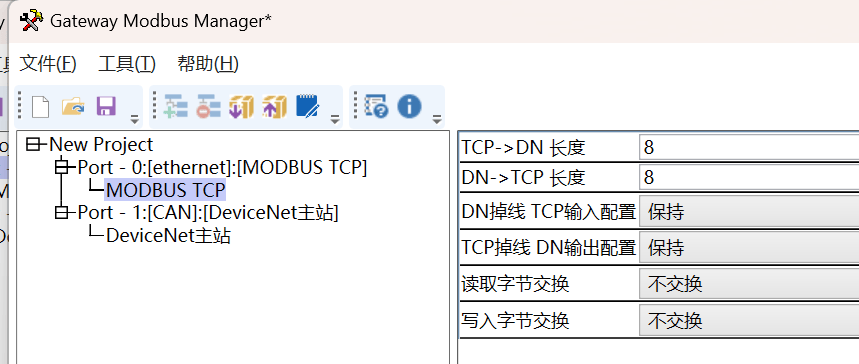
首先設置網關的ModbusTCP一側的IP地址以及數據長度。并設置網關短線后的數據處理方式以及字節交換順序
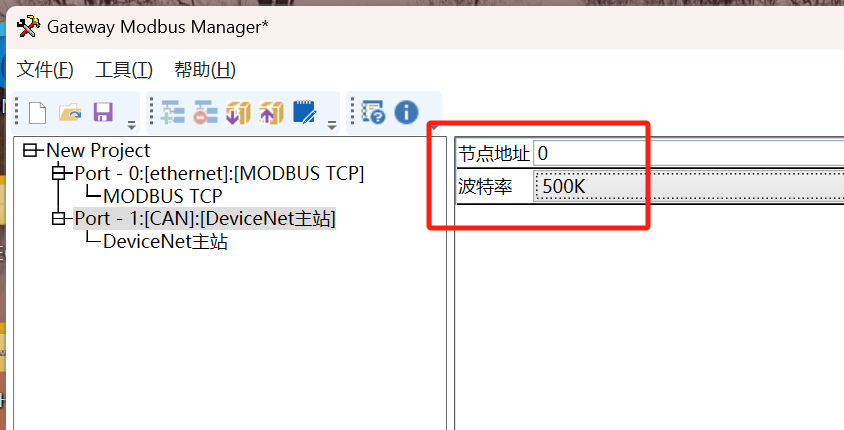
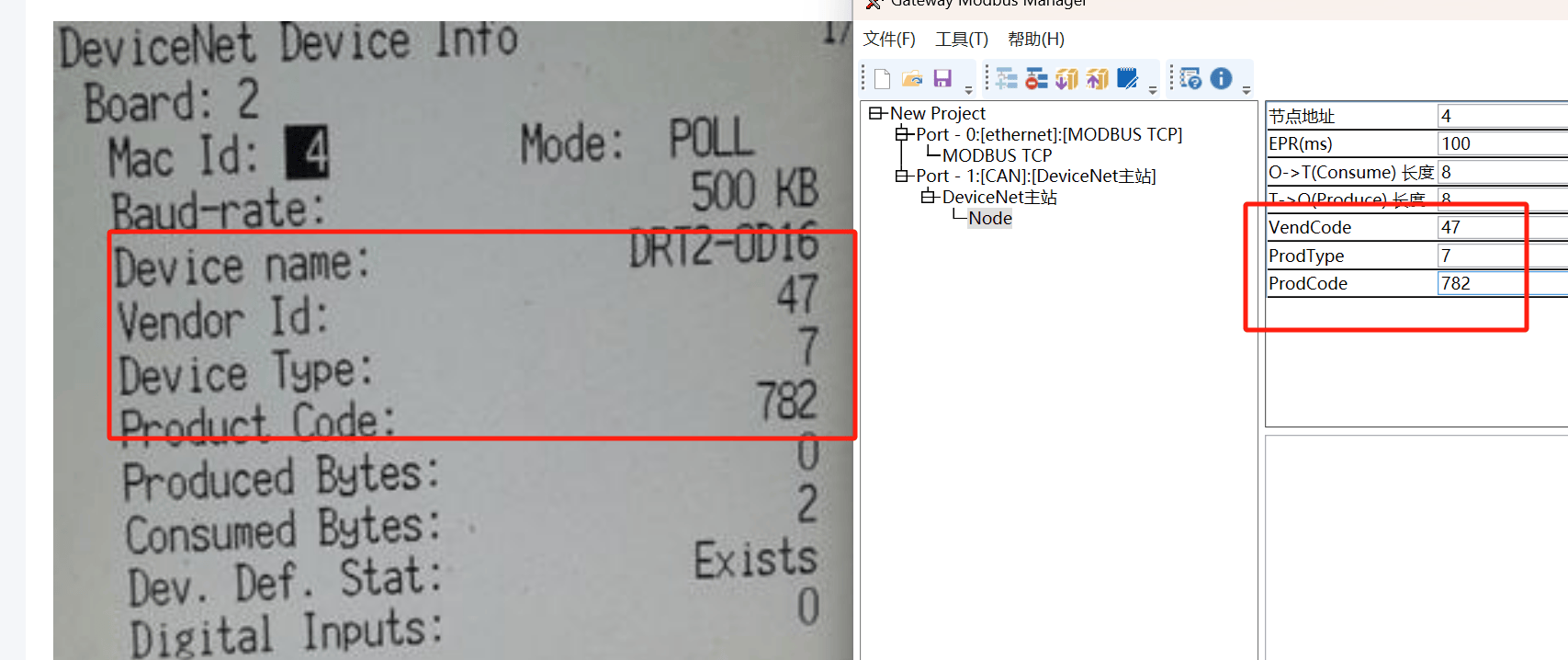
設置網關的Devicenet節點地址以及波特率,與機器人配置保持一致。
填寫從站參數站地址,數據長度等和從站保持一致。

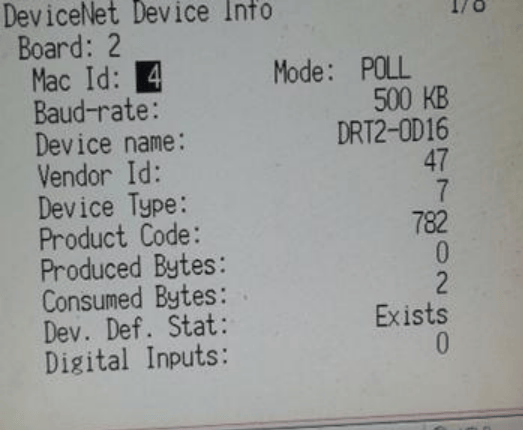
機器人地址設為4,所以網關同步保持一致
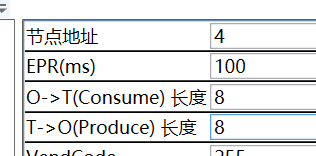
同樣,字節數長度為8字節,同樣保持一致
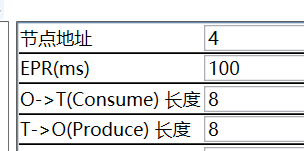
VendCode,ProdType及ProdCode三個參數參考前面圖中提供的參數
到此,網關與機器人配置結束,配置完成下載后將ModbusTCP主站連接到網關的ModbusTCP口即可開始對機器人進行讀寫。









)


:移動應用核心指標解析與用戶分層營收策略)



)

)
