在工業自動化場景中,DeviceNet和Modbus TCP是兩種常見的通信協議。DeviceNet通常用于連接現場設備(如傳感器、執行器等),而Modbus TCP則廣泛應用于以太網環境下的遠程監控和數據采集。當需要將基于DeviceNet協議的ABB機器人集成到支持Modbus TCP的控制系統中時,MODBUS TCP轉DEVICENET網關成為關鍵設備。
在汽車制造、焊接生產線等場景中,ABB機器人通常通過DeviceNet協議與本地控制器通信。隨著工廠數字化升級,新的生產管理系統可能基于Modbus TCP協議構建,此時需要通過網關實現DeviceNet與Modbus TCP的協議轉換,以實現機器人與上位機(如WinCC)的通信。硬件設備:MODBUS TCP轉DEVICENET網關。ABB機器人(支持DeviceNet接口)。以太網交換機、電纜等網絡設備。軟件工具:網關配置軟件(Gateway Configuration Studio)。
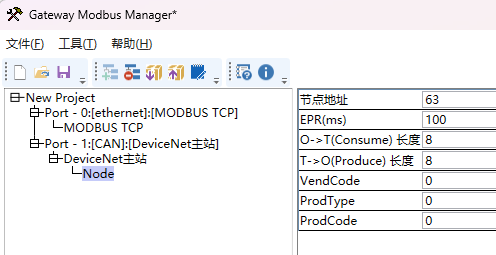
Modbus TCP客戶端(如WinCC、PLC等)。將網關的DeviceNet接口與ABB機器人的DeviceNet端口連接。將網關的Modbus TCP接口通過以太網連接到控制系統網絡。確保電源和信號線連接正確,避免松動或接觸不良。網關DeviceNet側配置:設置網關的DeviceNet站地址(0-31),確保與機器人配置一致。
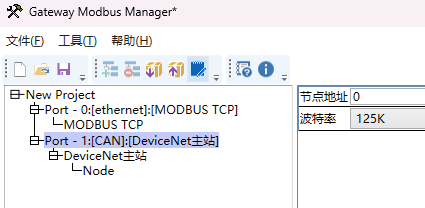
配置DeviceNet的波特率(125K、250K、500K),與機器人匹配。
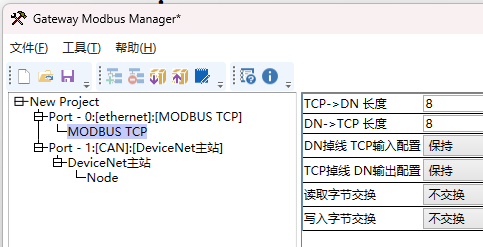
Modbus TCP側配置:設置網關的IP地址、子網掩碼、網關地址,確保與控制系統網絡兼容。
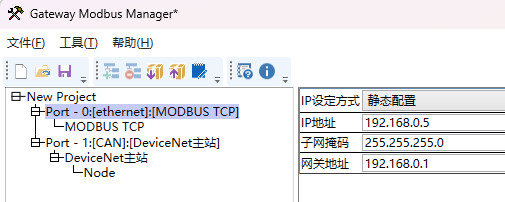
配置Modbus TCP一側的數據交換長度,字節順序以及掉線后數據處理方式。
使用網關配置軟件,將ABB機器人的DeviceNet數據地址映射到Modbus TCP寄存器地址。例如:將機器人的狀態信息(如關節角度、運行狀態)映射到Modbus TCP的保持寄存器(如40001-49999)。將控制指令(如運動軌跡、速度設定)從Modbus TCP映射到DeviceNet的控制字。注意:(內存映射自動對應,DviceNet從站數據會按順序映射到網關Modbus寄存器)啟動網關,檢查DeviceNet和Modbus TCP的通信狀態。通過Modbus TCP客戶端(如WinCC)讀取機器人狀態信息,并發送控制指令,驗證通信是否正常。通過以上配置案例,可以高效實現DeviceNet與Modbus TCP的協議轉換,滿足ABB機器人與現代控制系統的集成需求。如需更詳細的技術支持,可參考相關產品手冊或聯系設備供應商。
)












)





