YOLOv2:目標檢測的升級之作
在目標檢測領域,YOLO(You Only Look Once)系列算法以其高效的速度和創新的檢測方式受到了廣泛關注。今天,我們就來深入探討一下 YOLOv2,看看它是如何在繼承 YOLOv1 的基礎上進行改進,提升性能并推動目標檢測技術的發展。
一、YOLOv2 的背景與動機
YOLOv1 作為 YOLO 系列的開山之作,首次提出了一種新穎的單次檢測框架。它將目標檢測任務視為一個回歸問題,直接從圖像像素到邊界框坐標和類別概率的映射,避免了傳統兩階段檢測方法(如 Faster R-CNN)中復雜的區域候選提取和多次特征提取過程,從而實現了極高的檢測速度。然而,YOLOv1 也存在一些不足之處,例如定位精度不夠高、對小目標的檢測效果不佳等。YOLOv2 的出現正是為了解決這些問題,進一步提升目標檢測的性能。
二、YOLOv2 的架構與關鍵改進
(一)架構概覽
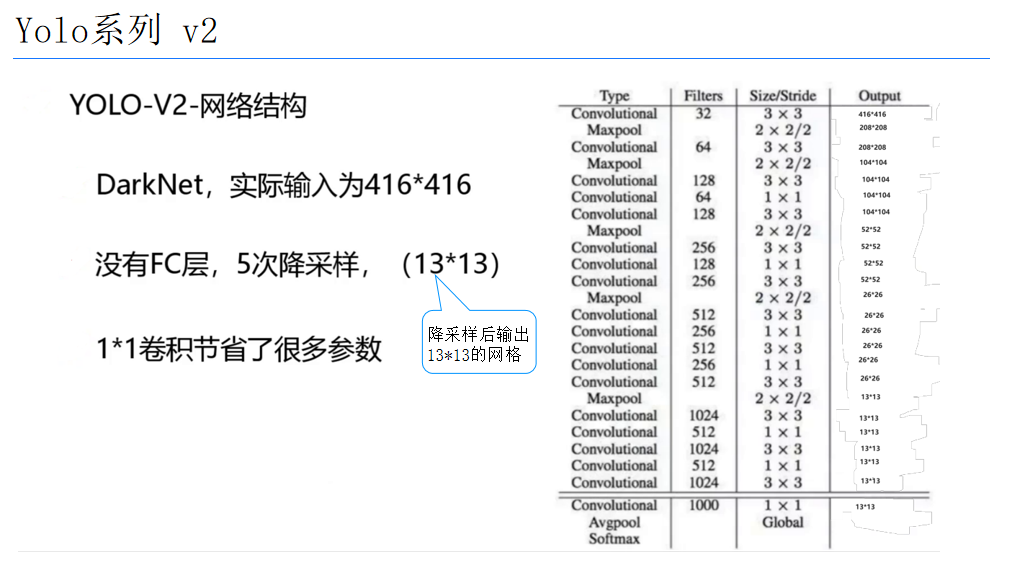
YOLOv2 的架構在 YOLOv1 的基礎上進行了優化。它采用了 Darknet-19 作為特征提取網絡,這是一個輕量級的卷積神經網絡,由 19 個卷積層組成。與 YOLOv1 使用的 Darknet-16 相比,Darknet-19 在保持計算效率的同時,增強了特征提取的能力。YOLOv2 的檢測部分仍然是基于錨框(anchor boxes)的,但對錨框的生成和使用方式進行了改進。
(二)關鍵改進點
-
Batch Normalization
YOLOv2 在每個卷積層后都加入了批量歸一化(Batch Normalization)操作。批量歸一化可以穩定訓練過程,加速收斂速度,同時還能起到一定的正則化作用,減少過擬合的風險。通過批量歸一化,YOLOv2 的訓練過程更加穩定,模型的泛化能力也得到了提升。
-
高分辨率分類器
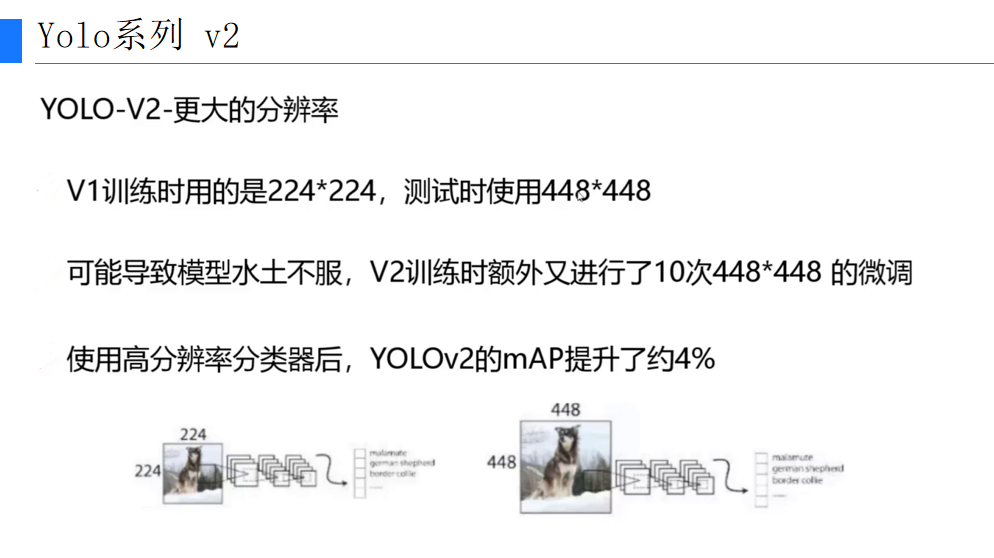
YOLOv2 在訓練初期使用高分辨率的輸入圖像(448×448)來訓練分類器,而不是直接使用檢測任務的輸入分辨率(416×416)。這樣做的目的是讓模型能夠學習到更豐富的細節特征,從而提高對小目標的檢測能力。在訓練后期,再將輸入分辨率調整為 416×416,以適應檢測任務的實際需求。
-
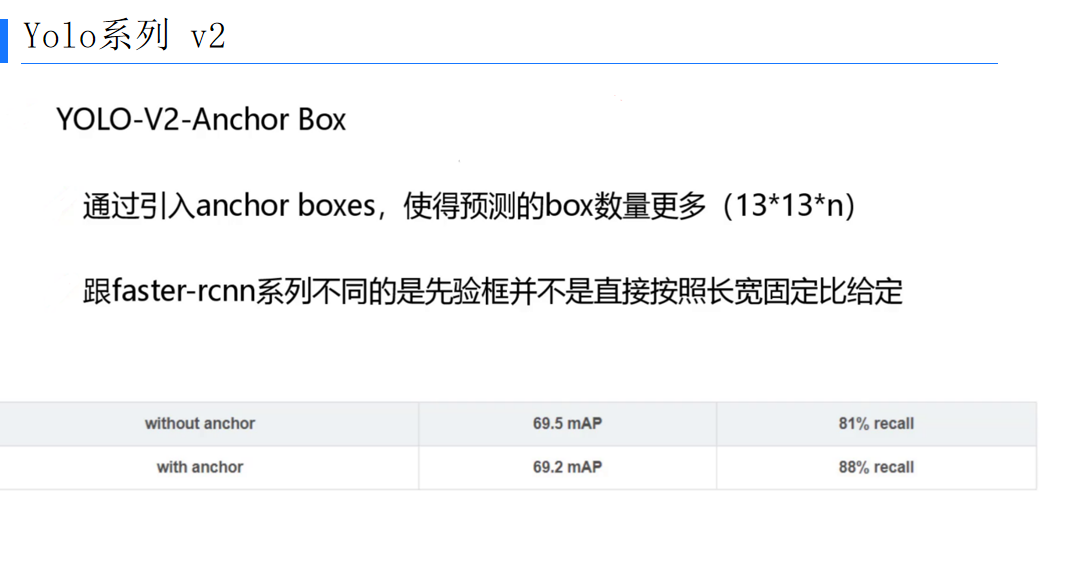
錨框聚類
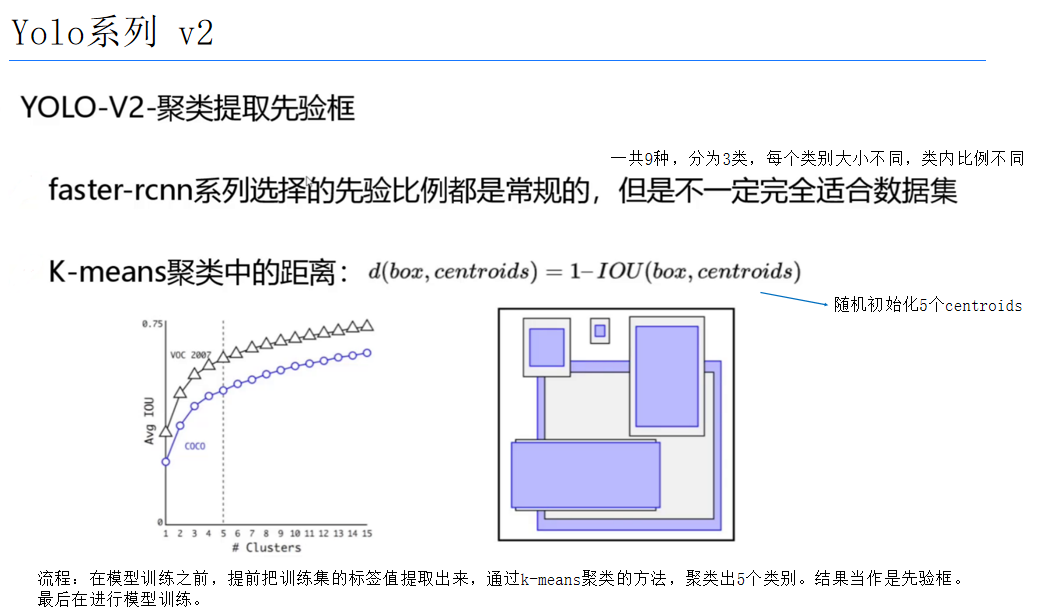
YOLOv1 使用了預定義的錨框尺寸,這些尺寸是手動設置的,可能與實際數據集中的目標尺寸分布不太匹配。YOLOv2 引入了錨框聚類技術,通過對訓練數據集中目標邊界框的尺寸進行聚類分析,生成一組更符合數據分布的錨框。這些經過聚類得到的錨框能夠更好地匹配目標的形狀和大小,從而提高檢測的準確性。
-
多尺度訓練
為了使模型能夠更好地適應不同尺寸的目標,YOLOv2 采用了多尺度訓練策略。在訓練過程中,模型會隨機選擇不同尺寸的輸入圖像進行訓練,而不是固定使用一種尺寸。這樣可以增強模型對不同尺度目標的魯棒性,提高其在實際檢測場景中的表現。 -
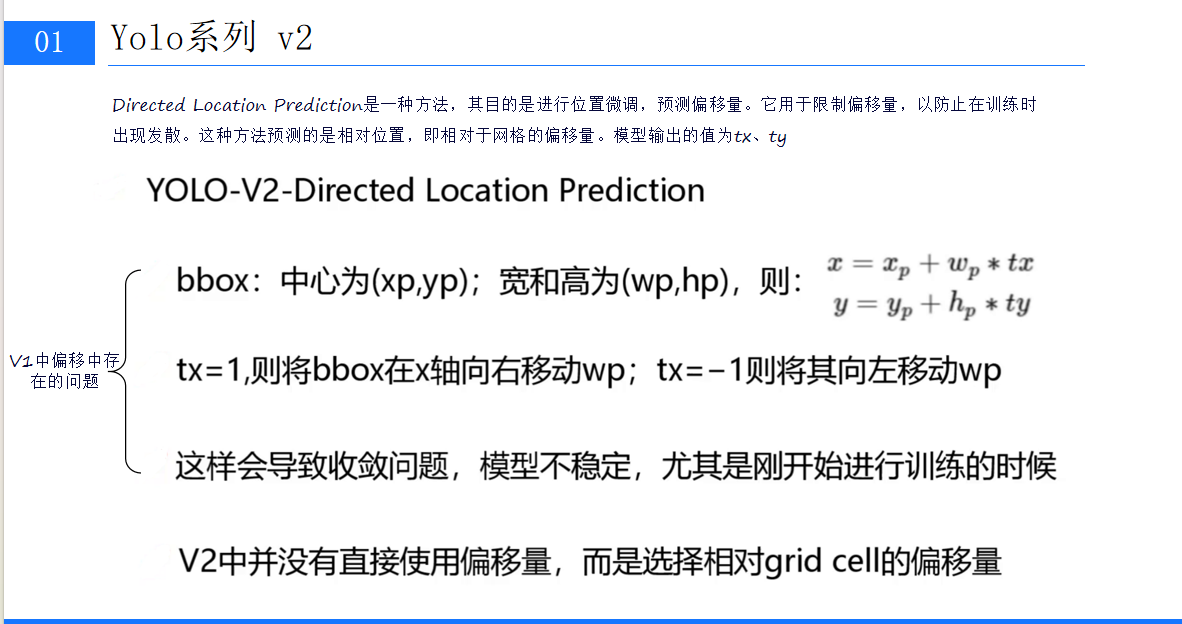
維度聚類和直接位置預測
YOLOv2 對邊界框的預測方式也進行了改進。它將邊界框的寬度和高度預測改為相對于錨框的偏移量預測,并且使用維度聚類技術來優化錨框的尺寸。同時,對于邊界框的中心位置預測,YOLOv2 直接預測相對于網格單元的偏移量,而不是預測絕對坐標。這種改進方式使得邊界框的預測更加準確,尤其是對于小目標的定位精度有了顯著提升。
-
類別預測的改進
在類別預測方面,YOLOv2 借鑒了 Faster R-CNN 的思想,將類別預測與邊界框預測解耦。它先預測邊界框的置信度,然后在置信度較高的邊界框中進行類別預測。這種解耦的方式可以提高類別預測的準確性,避免了因邊界框預測不準確而導致的類別誤判問題。
三、YOLOv2 的性能表現
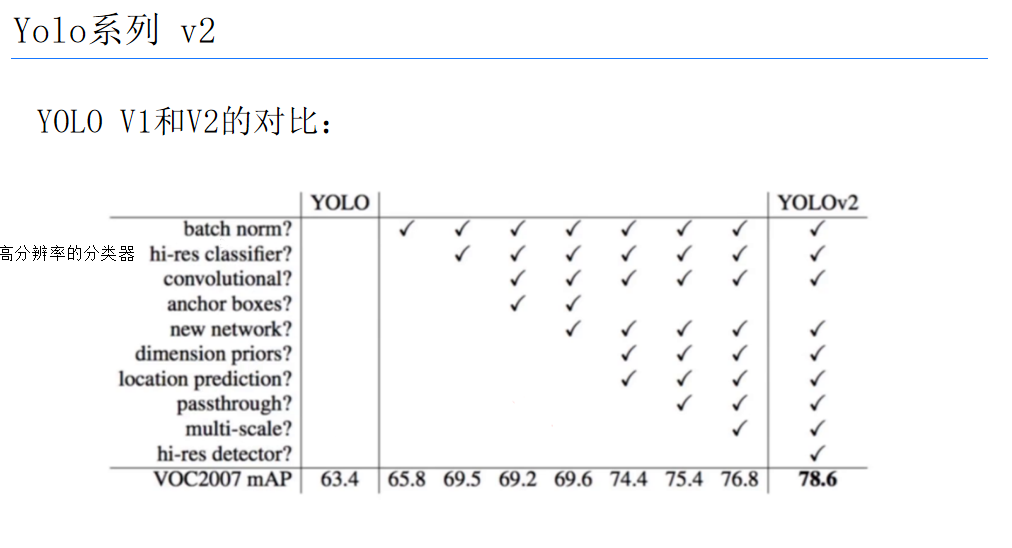
YOLOv2 在多個公開數據集上的實驗結果表明,它在速度和精度之間取得了良好的平衡。與 YOLOv1 相比,YOLOv2 的平均精度(mAP)有了顯著提升,同時保持了較高的檢測速度。例如,在 Pascal VOC 數據集上,YOLOv2 的 mAP 可以達到 78.6%,而在 COCO 數據集上,其 mAP 也達到了 57.9%。這些性能指標表明,YOLOv2 在目標檢測任務中已經達到了一個較高的水平,能夠滿足許多實際應用場景的需求。
四、YOLOv2 的應用場景
YOLOv2 的高效性和良好的性能使其在許多實際應用中得到了廣泛的應用。例如,在視頻監控領域,YOLOv2 可以實時檢測視頻中的目標,如行人、車輛等,為安防監控提供技術支持。在自動駕駛領域,YOLOv2 可以快速準確地檢測道路上的交通標志、行人、車輛等目標,為自動駕駛系統提供重要的環境感知信息。此外,YOLOv2 還可以應用于機器人視覺、工業檢測、醫學圖像分析等多個領域,為這些領域的發展提供了有力的支撐。
五、總結與展望
YOLOv2 作為 YOLO 系列的一個重要版本,通過一系列的改進,在目標檢測的精度和速度方面都取得了顯著的進步。它不僅繼承了 YOLOv1 的高效性,還解決了 YOLOv1 存在的一些問題,如定位精度不高、對小目標檢測效果不佳等。YOLOv2 的出現為實時目標檢測任務提供了一個更加可靠的解決方案,推動了目標檢測技術的發展。然而,目標檢測領域仍然面臨著許多挑戰,如如何進一步提高對復雜場景中目標的檢測精度、如何更好地處理遮擋和光照變化等問題。隨著深度學習技術的不斷發展和創新,相信 YOLO 系列算法以及其他的先進目標檢測算法將在未來的目標檢測任務中發揮更加重要的作用,為計算機視覺領域的發展做出更大的貢獻。








:live555創建RTSP服務器源碼剖析,創建h264文件rtsp服務器源碼深度剖析)




——從應用到設計)
![洛谷 P1955 [NOI2015] 程序自動分析](http://pic.xiahunao.cn/洛谷 P1955 [NOI2015] 程序自動分析)
![[Java] 輸入輸出方法+猜數字游戲](http://pic.xiahunao.cn/[Java] 輸入輸出方法+猜數字游戲)
)


