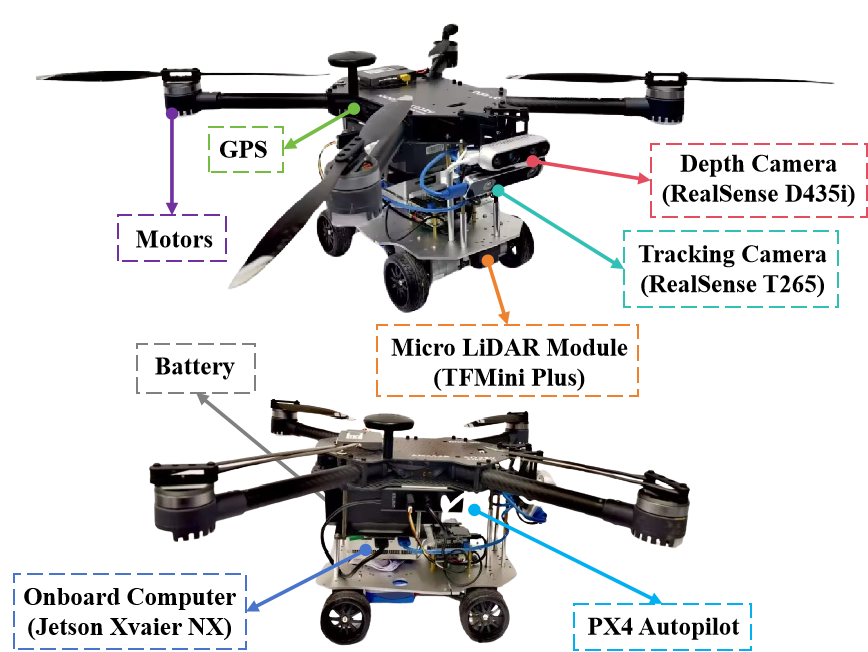
隨著空陸兩棲機器人(AGR)在應急救援和城市巡檢等領域的應用范圍不斷擴大,其在復雜動態環境中實現自主導航的挑戰也日益凸顯。對此香港大學王俊銘基于阿木實驗室P600無人機平臺自主搭建了一整套空地兩棲機器人,使用Prometheus開源框架完成算法的仿真驗證與實機部署。繼AGRNav[ICRA’24]和HE-Nav[RA-L’24]等研究成果后,王俊銘同學近期發表的OMEGA [RA-L 2025]和OccRWKV[ICRA 2025]論文,為解決復雜動態環境下的自主導航問題提供了創新思路。這些研究不僅拓展了空地兩棲機器人的應用場景,也為提升其在不確定環境中的適應能力奠定了理論基礎。
空地兩棲機器人系列內容
OccRWKV (ICRA’25) 首個RWKV-based 的3D語義占用網絡。
OMEGA (RA-L’24) 首個空陸兩棲機器人動態導航系統,高效應對動態環境。
HE-Nav (RA-L’24) 首個ESDF-free空陸兩棲導航系統,高效應對雜亂環境。
AGRNav (ICRA’24) 首個遮擋感知空陸兩棲導航系統,高效應對遮擋豐富環境。
本文主要針對最新的研究成果 OccRWKV (ICRA’25)和 OMEGA (RA-L’24) 進行解讀。
OMEGA導航系統
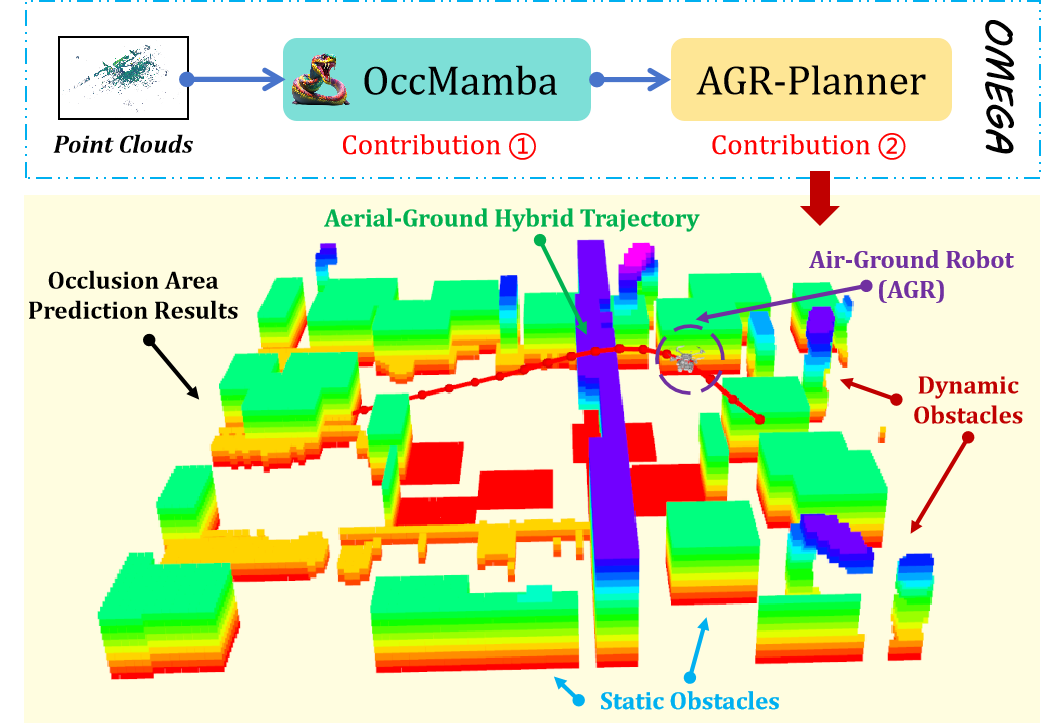
傳統空地機器人導航系統依賴3D語義占用網絡預測遮擋區域,并通過ESDF(歐幾里得符號距離場)進行路徑規劃。但在動態場景中(如人群密集區),該方案會出現感知延遲且規劃低效等問題。而*OMEGA 是首個專為空地兩棲機器人設計、確保在高度遮擋和快速變化的環境中高效自主導航。
技術亮點
OMEGA系統通過OccMamba感知網絡與AGR-Planner規劃器實現端到端優化。
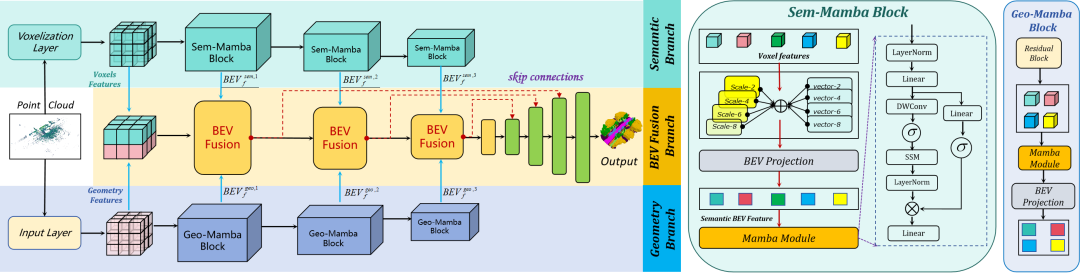
OccMamba網絡:
-
創新性地提出了一種三分支網絡結構,將語義和幾何預測解耦為不同的部分,通過集成Sem-Mamba與Geo-Mamba模塊,高效地進行3D語義占用預測。
-
引入Mamba狀態空間模型,利用線性復雜度捕獲長距離依賴。
-
特征投影至BEV空間融合,計算負載降低37%(22.1 FPS實時推理)。
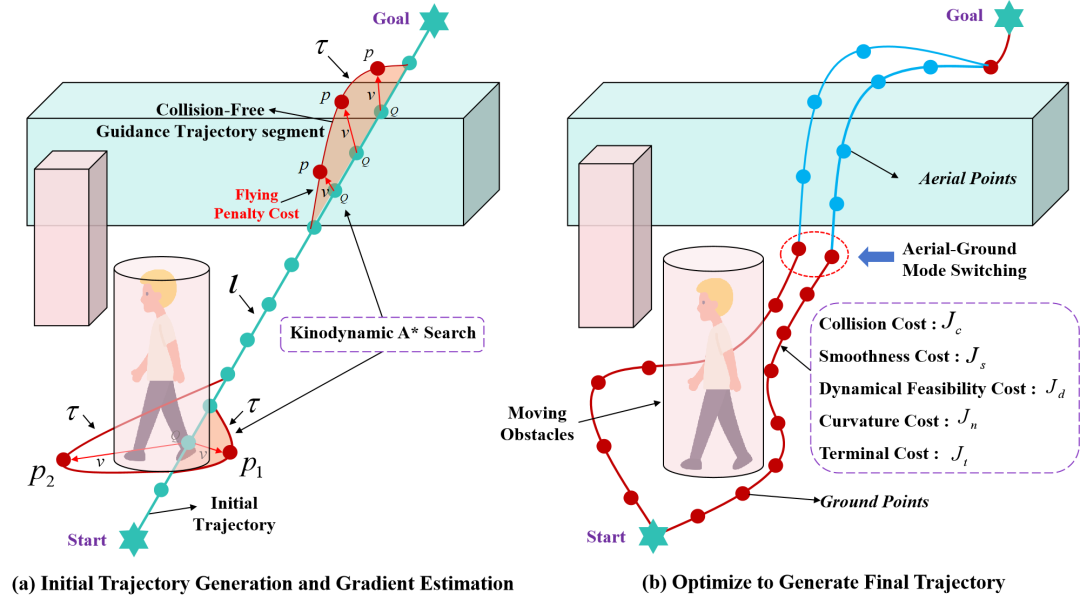
AGR-Planner規劃器:
-
ESDF-Free路徑搜索:結合Kinodynamic A*算法與梯度優化,規劃時間從6.5s縮短至0.8s。
-
引入能量消耗約束項,讓空地模式切換的決策效率提升3倍。
實機驗證
-
在SemanticKITTI數據集上,OccMamba的mIoU達25.0(SOTA)
-
實測動態環境規劃耗時僅0.8秒,成功率98%
開源鏈接
https://jmwang0117.github.io/OMEGA/
OccRWKV 3D語義占用網絡
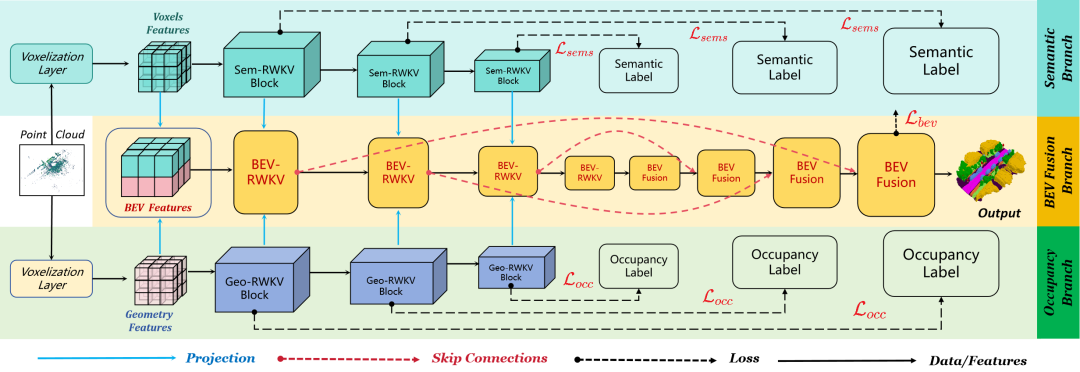
現有3D語義占據網絡普遍存在計算冗余,而OccRWKV是首個基于RWKV架構設計的3D語義占用網絡,能夠實現線性復雜度的全局特征建模。
技術突破
-
**雙支路解耦設計:**將語義預測(識別物體類別)與幾何預測(判斷占據空間)分離為獨立分支,避免特征干擾。
-
**RWKV注意力機制:**通過類似人腦記憶的循環網絡結構,在包含256×256×32個三維單元的立體地圖中,用線性增長的計算量實現跨區域特征關聯。
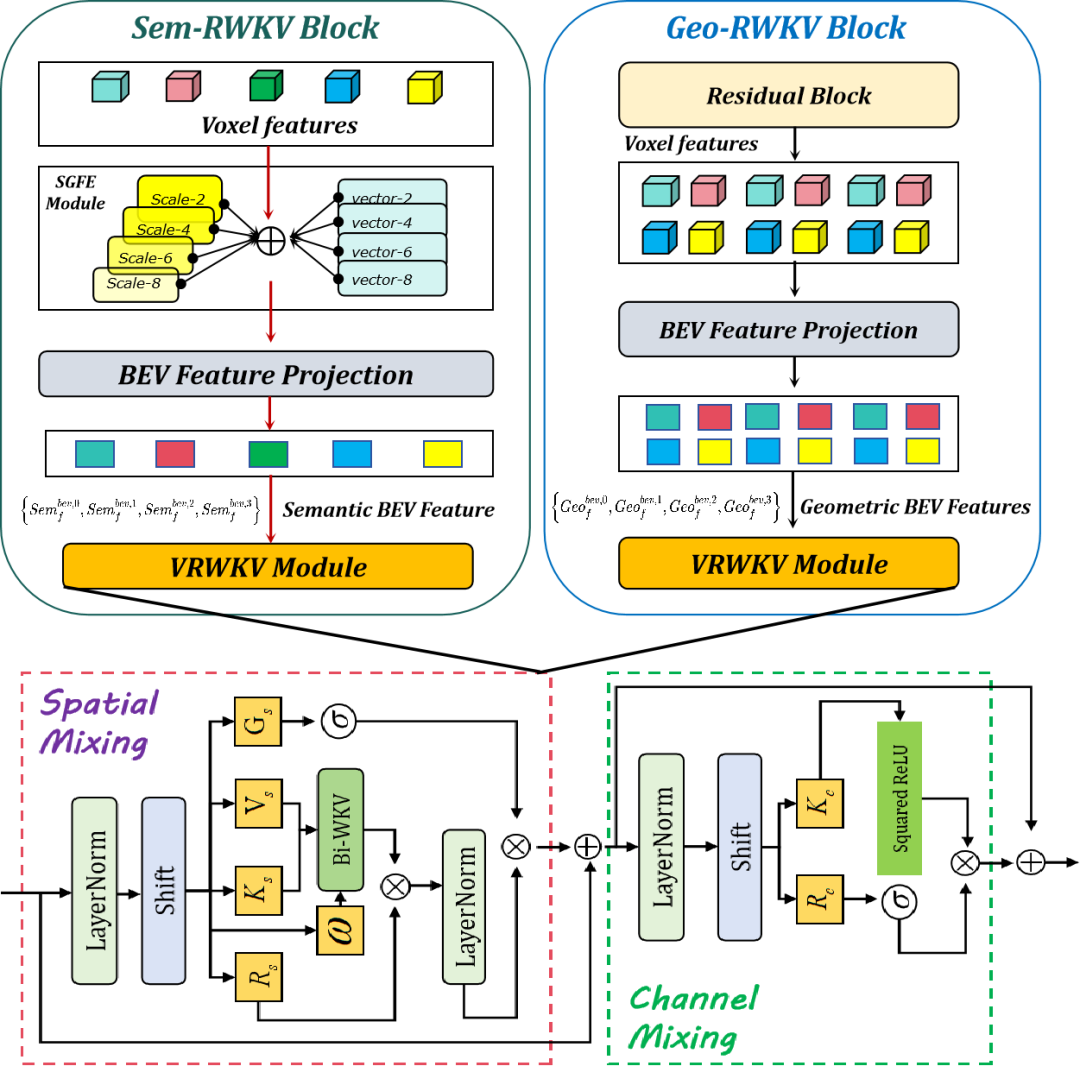
- **BEV空間投影:**將三維特征壓縮至鳥瞰圖空間融合,計算量降低78.5%。
實驗驗證
-
部署速度22.2 FPS(Jetson Xavier NX)滿足機器人實時需求。
-
零樣本遷移實驗顯示,在未知環境導航任務中移動時間降低16.5%。
開源鏈接
https://jmwang0117.github.io/OccRWKV/


)
![[LeetCode 1871] 跳躍游戲 7(Ⅶ)](http://pic.xiahunao.cn/[LeetCode 1871] 跳躍游戲 7(Ⅶ))
)





)








)