1 PPO的講解
核心步驟,如策略網絡和價值網絡的定義、優勢估計、策略更新、價值更新等基礎功能的實現
2 代碼構成
可能涉及
初始化,Behavior Clone
3 動手強化學習
import pytorch as torch
class actorcritic ##等待補充?
4 PD Gains
在機器人學中,PD gains(比例 - 微分增益) 是指比例控制(Proportional control)和微分控制(Derivative control)中的增益參數,分別稱為 P gain(比例增益) 和 D gain(微分增益),它們是 PD 控制算法的核心組成部分,對機器人的運動控制性能起著關鍵作用。具體如下:
1. P gain(比例增益)
- 作用:與機器人當前的誤差(如位置誤差、角度誤差等)成正比,用于快速響應誤差。例如,當機器人的機械臂需要移動到某個目標位置時,若實際位置與目標位置存在誤差,比例增益會根據誤差大小輸出一個控制量,推動機械臂向減小誤差的方向運動。
- 影響:比例增益越大,系統對誤差的響應越迅速,但過大的比例增益可能導致系統超調(即運動超過目標位置),甚至產生震蕩,使機器人運動不穩定。
2. D gain(微分增益)
- 作用:與誤差的變化率成正比,用于預測誤差的變化趨勢。它能根據誤差變化的快慢調整控制量,抑制超調,增加系統的穩定性。例如,當機械臂接近目標位置時,微分增益會檢測到誤差變化率減小,提前降低控制量,使機械臂平穩停止,避免沖過目標位置。
- 影響:合適的微分增益可以改善系統的動態特性,減少調整時間;但微分增益過大可能使系統對噪聲過于敏感(如傳感器噪聲會被放大影響控制),過小則難以有效抑制超調。
機器人學中的應用示例
在機器人的關節控制中,PD 控制常用于調節電機的輸出。例如,若機器人某關節需要從當前角度轉動到目標角度:
- 當角度誤差較大時,比例增益起主導作用,快速驅動關節向目標角度轉動;
- 隨著角度誤差減小,微分增益根據誤差變化率調整輸出,使關節平穩地停在目標角度,避免來回晃動。
## 機器人關節電機控制模式及參數class control:## 控制類型:位置控制、速度控制、扭矩控制control_type = 'P' # P: position, V: velocity, T: torques## PD驅動的參數## stiffness代表剛度系數k_p damping代表阻尼系數k_dstiffness = {'joint_a': 10.0, 'joint_b': 15.} # [N*m/rad]damping = {'joint_a': 1.0, 'joint_b': 1.5} # [N*m*s/rad]## 公式如下,與action的轉化為什么要有這樣的比例因子暫未明白# action scale: target angle = actionScale * action + defaultAngleaction_scale = 0.5## decimation: Number of control action updates @ sim DT per policy DT## 仿真環境的控制頻率/decimation=實際環境中的控制頻率decimation = 4
5 相關研究分享
1 CMU的H2O
Learning Human-to-Humanoid Real-Time Whole-Body TeleoperationLearning Human-to-Humanoid Real-Time Whole-Body Teleoperation![]() https://human2humanoid.com/
https://human2humanoid.com/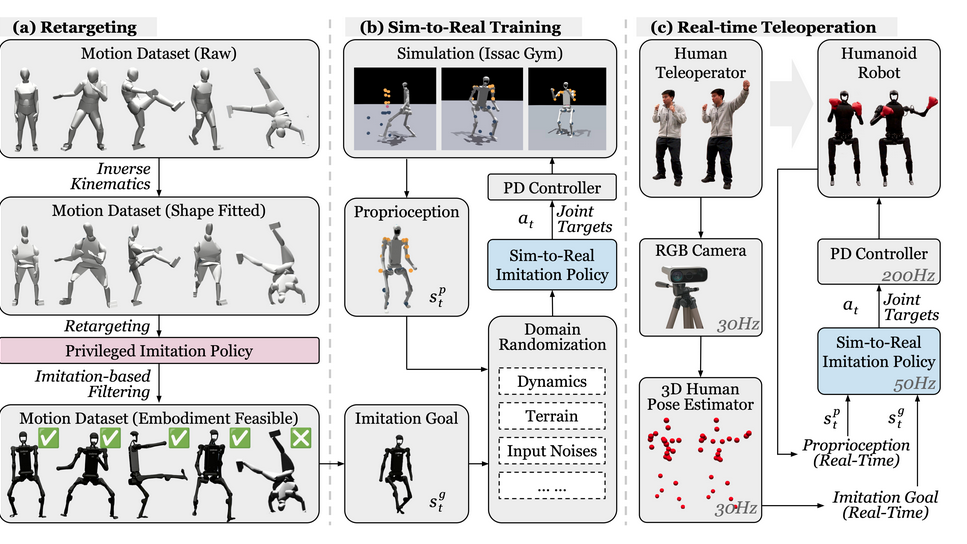
2 leggedgym
ETH開發的庫函數
https://github.com/leggedrobotics/legged_gym![]() https://github.com/leggedrobotics/legged_gym
https://github.com/leggedrobotics/legged_gym
如何使用?:
- Train:
python legged_gym/scripts/train.py --task=anymal_c_flat
- To run on CPU add following arguments:
--sim_device=cpu,--rl_device=cpu(sim on CPU and rl on GPU is possible).- To run headless (no rendering) add
--headless.- Important: To improve performance, once the training starts press
vto stop the rendering. You can then enable it later to check the progress.- The trained policy is saved in
issacgym_anymal/logs/<experiment_name>/<date_time>_<run_name>/model_<iteration>.pt. Where<experiment_name>and<run_name>are defined in the train config.- The following command line arguments override the values set in the config files:
- --task TASK: Task name.
- --resume: Resume training from a checkpoint
- --experiment_name EXPERIMENT_NAME: Name of the experiment to run or load.
- --run_name RUN_NAME: Name of the run.
- --load_run LOAD_RUN: Name of the run to load when resume=True. If -1: will load the last run.
- --checkpoint CHECKPOINT: Saved model checkpoint number. If -1: will load the last checkpoint.
- --num_envs NUM_ENVS: Number of environments to create.
- --seed SEED: Random seed.
- --max_iterations MAX_ITERATIONS: Maximum number of training iterations.
- Play a trained policy:
python legged_gym/scripts/play.py --task=anymal_c_flat
- By default, the loaded policy is the last model of the last run of the experiment folder.
- Other runs/model iteration can be selected by setting
load_runandcheckpointin the train config.
3 RL_rsl
https://github.com/leggedrobotics/rsl_rl![]() https://github.com/leggedrobotics/rsl_rl
https://github.com/leggedrobotics/rsl_rl
快速、簡單地實現RL算法,旨在在GPU上完全運行。 這段代碼是一個進化過程。rl-pytorchNVIDIA 的 Isaac GYM 發布。
使用框架的環境存儲庫:
Isaac Lab(建立在NVIDIA Isaac Sim之上):https://github.com/isaac-sim/IsaacLabLegged-Gym(基于 NVIDIA Isaac Gym 構建):https://leggedrobotics.github.io/legged_gym/
PPO主要分支支持PPO和學生教師蒸餾,以及我們研究的其他功能。這些包括:
- 隨機網絡蒸餾(RND)
 https://proceedings.mlr.press/v229/schwarke23a.html - 通過添加來鼓勵探索 好奇心驅動的內在獎勵。
https://proceedings.mlr.press/v229/schwarke23a.html - 通過添加來鼓勵探索 好奇心驅動的內在獎勵。 - 基于對稱性的增強https://arxiv.org/abs/2403.04359 - 使學習的行為更加對稱。



















