灰度傳感器概覽
一、定義與核心功能
1. 定義
灰度傳感器是一種基于 光反射原理 的光電傳感器,通過檢測物體表面對入射光(多為紅外光或可見光)的反射強度,將光信號轉換為電信號,從而判斷目標物體的 灰度值(顏色深淺)或表面特性。其核心在于利用不同顏色、材質對光的反射率差異(如黑色反射率低、白色反射率高),實現非接觸式的定性或定量檢測。
2. 核心功能
- 灰度識別:區分物體表面的黑白、深淺程度(如0-255級灰度值量化)。
- 狀態判斷:通過灰度差異識別目標物體的存在、位置、邊界或類別(如黑白線循跡、顏色分揀)。
- 表面特性檢測:間接反映物體材質(如光澤度、粗糙度)或缺陷(如污漬、劃痕)。
二、分類
1. 按檢測方式分類
-
單點式(點對點):
- 結構:單個發射-接收對管(如紅外LED+光敏三極管),檢測單點反射光強。
- 特點:體積小、成本低,適用于簡單場景(如循跡小車、黑白分揀)。

-
線陣式(一維掃描):
- 結構:多個檢測單元線性排列(如16/32/64通道),可獲取一條直線上的灰度分布。
- 應用:工業表面缺陷檢測、印刷品邊緣定位、紙張褶皺檢測。
-
面陣式(二維成像):
- 結構:集成圖像傳感器(如CCD/CMOS),輸出二維灰度圖像(分辨率如640×480)。
- 功能:接近灰度攝像頭,支持復雜圖像處理(如OCR、條形碼識別、輪廓分析)。
2. 按光源類型分類
- 紅外式:
- 發射紅外光(波長850-940nm),內置濾光片過濾可見光,抗環境光干擾強,適合室內外復雜光照場景(如機器人導航、工業檢測)。
- 可見光式:
- 直接利用環境光或可見光光源(如白光LED),依賴光照條件,精度較低,僅用于光照穩定的簡單場景(如玩具循跡)。
3. 按輸出信號分類
- 模擬型:輸出連續電壓信號(如0-5V),需模數轉換(ADC)后處理,精度取決于傳感器靈敏度和電路噪聲。
- 數字型:輸出開關量(如高低電平),預設閾值區分黑白(如黑線檢測時輸出低電平),無需復雜算法,響應速度快。
4. 按結構原理分類
- 反射式(漫反射):發射與接收端同側,檢測物體反射光(最常見,如循跡傳感器)。
- 對射式:發射與接收端分置,檢測光路是否被遮擋(嚴格來說屬于光電開關,但可通過反射光強變化檢測灰度,較少見)。
三、工作原理
1. 硬件架構
- 發射端:紅外LED或可見光LED,發射固定波長的光束。
- 接收端:光敏元件(光敏電阻、光敏二極管/三極管),將反射光轉換為電信號。
- 信號處理電路:放大、濾波、模數轉換(模擬型)或閾值比較(數字型),輸出可用信號。
2. 物理原理
-
反射率公式:
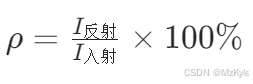
其中,黑色物體 (ρ < 20%),白色物體 (ρ > 80%),灰度值與 (ρ) 正相關。
-
距離特性:
接收光強隨距離增加呈平方衰減,最佳檢測距離需通過標定確定(通常5-20mm,避免飽和或信號過弱)。
3. 信號輸出邏輯
-
模擬型:電壓信號

,如白色表面輸出3V,黑色表面輸出0.5V。 -
數字型:預設閾值 V t V_t Vt?, V o V_o Vo? > V t V_t Vt? 判為白色(高電平),反之為黑色(低電平)。
四、典型應用場景
1. 機器人與智能設備
- 循跡導航:
- 智能小車通過單點傳感器實時檢測地面黑線(如黑色膠帶反射率低,輸出低電平),調整電機轉速實現路徑跟蹤。
- 避障與分揀:
- 工業機械臂通過線陣傳感器識別傳送帶上黑白工件,分類抓取;掃地機器人識別地毯(深色)切換清潔模式。
2. 工業與制造業
- 表面缺陷檢測:
- 檢測金屬表面劃痕(劃痕處反射率突變)、PCB焊點漏焊(焊盤與基板灰度差異)。
- 印刷與包裝:
- 監測標簽位置偏移(對比標準灰度模板)、檢測二維碼/條形碼印刷質量(黑白條邊界清晰度)。
3. 醫療與科研
- 醫學檢測:
- 血液細胞分析儀通過灰度掃描檢測細胞形態(黑白對比度反映細胞密度);膠片掃描儀獲取X光片灰度圖像。
- 實驗教學:
- 高校實驗室用于PID控制實驗(循跡小車速度調節)、傳感器原理演示(灰度信號與反射率關系)。
4. 其他領域
- 農業:檢測作物葉片病害(病斑處灰度異常)、分揀水果成熟度(顏色深淺對應灰度值)。
- 交通:車牌識別預處理(灰度化減少色彩干擾)、路面標線檢測(輔助自動駕駛)。
五、優缺點與技術限制
1. 優點
- 成本低廉:單點式傳感器價格僅幾元至幾十元,遠低于顏色傳感器或攝像頭。
- 響應迅速:納秒級光信號響應,適合實時控制(如高速流水線檢測)。
- 抗干擾性強:紅外式傳感器通過濾光片屏蔽可見光,適應強光、逆光等復雜環境。
- 易集成:體積小(多為模塊化設計),兼容Arduino、STM32等主流控制平臺。
2. 缺點
- 顏色識別局限:
- 僅能區分灰度,無法識別具體顏色(如深紅與深灰反射率相近時誤判)。
- 材質依賴性:
- 光澤度高的物體(如鏡面、金屬)可能導致反射光強異常,粗糙表面(如毛氈)反射率不穩定。
- 距離敏感性:
- 檢測距離變化±2mm可能導致信號波動,需嚴格固定安裝位置或增加測距補償。
- 二維信息缺失:
- 單點/線陣傳感器無法獲取立體信息,復雜場景需多傳感器陣列或結合其他傳感器(如超聲波)。
3. 技術限制與應對
- 環境光干擾:強光下(如陽光直射)使用紅外式傳感器+窄帶濾光片,或增加遮光罩。
- 溫度漂移:紅外LED發光效率隨溫度變化,需定期校準或加入溫度補償電路。
- 閾值標定:通過黑白標準塊(如反射率0%和100%)采集信號,計算中間閾值
六、與相關技術的對比
| 技術 | 核心區別 | 典型應用 | 成本 | 復雜度 |
|---|---|---|---|---|
| 灰度傳感器 | 單點/線陣檢測,輸出模擬/數字信號,僅灰度判斷 | 循跡、黑白分揀、簡單缺陷檢測 | 低 | 低 |
| 顏色傳感器 | 支持RGB三通道檢測,識別具體顏色(如紅、綠、藍) | 彩色分揀、屏幕色彩校準 | 中 | 中 |
| 灰度攝像頭 | 輸出二維灰度圖像,需算法處理(如邊緣檢測、圖像分割) | OCR、條形碼識別、復雜表面檢測 | 高 | 高 |
| 激光傳感器 | 檢測距離與輪廓,精度高但不區分顏色 | 三維建模、避障導航 | 很高 | 高 |
七、技術參數與選型要點
- 靈敏度:最小可檢測的反射率變化(如1%反射率差)。
- 分辨率:模擬型傳感器的ADC位數(如12位對應4096級灰度);數字型的閾值穩定性。
- 工作距離:最佳檢測范圍(如5-15mm),需匹配應用場景(如小車循跡距離通常10mm)。
- 響應頻率:每秒最大檢測次數(如10kHz適用于高速流水線)。
- 功耗:發射端LED電流(如20mA)和接收端靜態電流(如5mA),低功耗場景需優先選擇。
八、總結
灰度傳感器是低成本、高性價比的灰度檢測工具,在黑白區分、路徑跟蹤、簡單缺陷檢測等場景中具有不可替代的優勢。盡管存在顏色識別單一、依賴距離等局限,但其模塊化設計和易集成性使其成為入門級機器人、工業自動化的首選傳感器。隨著多傳感器融合技術的發展,灰度傳感器常與攝像頭、超聲波等配合使用,構建更智能的環境感知系統,未來在物聯網、智能家居等領域的應用將持續擴展。
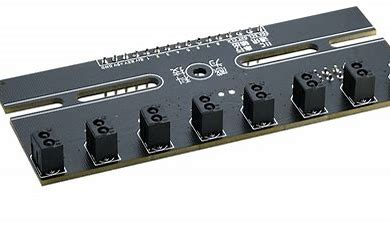
電賽常用灰度傳感器
六路、八路、十二路灰度傳感器屬于線陣式灰度傳感器的細分分類,其核心區別在于檢測通道數量的不同。
一、分類依據與核心概念
-
通道數量定義
- 六路:6個獨立檢測通道,可同步采集6個點的灰度值。
- 八路:8個通道,適用于中等密度檢測需求。
- 十二路:12個通道,提供更高密度的檢測點。
- 本質:屬于線陣式傳感器的一維掃描陣列,通過增加通道數量提升檢測分辨率。
-
硬件結構差異
- 物理排列:通道以直線形式排列(如間距1-5mm),每個通道包含獨立的發射-接收對管(如紅外LED+光敏三極管)。
- 信號處理:多通道傳感器需集成多路模數轉換(ADC)或閾值比較電路,部分支持并行輸出(如八路傳感器的8位并行數據)。
- 通信接口:高級型號(如十二路)可能支持IIC、UART等總線協議,簡化數據傳輸。
二、技術特點與性能對比
| 參數 | 六路 | 八路 | 十二路 |
|---|---|---|---|
| 檢測密度 | 低(點間距大) | 中 | 高(點間距小) |
| 分辨率 | 較低 | 中等 | 高 |
| 檢測范圍 | 5-20mm | 5-20mm | 5-20mm |
| 響應時間 | 較快(μs級) | 中等 | 較慢(ms級) |
| 成本 | 低 | 中等 | 高 |
| 典型應用 | 簡單循跡 | 工業檢測 | 高精度掃描 |
-
分辨率提升:
十二路傳感器在10mm長度內分布12個檢測點,點間距約0.8mm,可檢測更細微的灰度變化(如0.5mm寬的劃痕),而六路傳感器點間距約1.6mm,可能漏檢更小缺陷。 -
信號處理復雜度:
多通道傳感器需處理更多數據,例如十二路傳感器每秒可輸出數萬字節數據,需搭配高性能微控制器(如STM32F4)或FPGA進行實時處理。
三、典型應用場景
1. 機器人與智能設備
-
循跡導航:
- 八路傳感器用于競賽機器人(如FLL、VEX),通過中間六路檢測黑線,左右兩路識別岔路口。
- 十二路傳感器用于高精度路徑跟蹤,如AGV小車在復雜工廠環境中避障。
-
分揀與識別:
- 六路傳感器識別黑白工件,八路傳感器區分黑白紅三色(需結合閾值算法),十二路傳感器分析印刷品顏色均勻性。
2. 工業與制造業
-
表面缺陷檢測:
- 十二路傳感器掃描金屬板材,檢測0.1mm級劃痕或污漬(如汽車鋼板生產線)。
- 八路傳感器用于PCB板焊點檢測,通過灰度突變判斷漏焊或虛焊。
-
印刷質量控制:
- 六路傳感器監測標簽位置偏移,八路傳感器檢測條形碼印刷對比度,十二路傳感器分析油墨厚度均勻性。
3. 科研與教育
- 教學實驗:
- 六路傳感器用于高校PID控制實驗(如循跡小車速度調節),八路傳感器演示多傳感器融合算法。
- 十二路傳感器用于圖像識別教學,通過掃描一維灰度分布模擬二維圖像采集。
四、優缺點與選擇建議
1. 優點
- 高密度檢測:多通道提升分辨率,適合復雜場景(如十二路傳感器檢測精密部件)。
- 結構靈活:線陣式設計可定制長度(如10mm至100mm),適應不同檢測區域需求。
- 成本可控:六路/八路傳感器價格低廉(約10-50元),十二路傳感器價格較高(約200-500元),但仍低于二維攝像頭。
2. 缺點
- 二維信息缺失:僅能獲取一維灰度分布,需結合其他傳感器(如超聲波)實現立體感知。
- 環境敏感性:強光或鏡面反射可能干擾信號,需搭配遮光罩或紅外濾光片。
- 數據處理壓力:十二路傳感器每秒輸出數萬數據點,需優化算法避免延遲。
3. 選擇建議
- 簡單任務:選擇六路傳感器(如玩具小車循跡)。
- 中等精度:八路傳感器(如工業黑白分揀)。
- 高精度需求:十二路傳感器(如半導體晶圓檢測)。
- 預算限制:優先選擇八路傳感器,平衡成本與性能。
五、與相關技術的對比
| 技術 | 核心區別 | 典型應用 | 成本 | 復雜度 |
|---|---|---|---|---|
| 單點傳感器 | 僅1個檢測點,無法掃描 | 基礎循跡、簡單避障 | 低 | 低 |
| 線陣攝像頭 | 輸出一維灰度圖像,需算法處理 | 工業表面檢測、文檔掃描 | 高 | 高 |
| 二維攝像頭 | 輸出二維圖像,支持復雜視覺算法 | 人臉識別、物體分類 | 很高 | 很高 |
六、總結
六路、八路、十二路灰度傳感器通過增加檢測通道數量,實現了從基礎到高精度的一維灰度掃描。其核心價值在于性價比與分辨率的平衡:
- 六路:適合教育、玩具等簡單場景。
- 八路:工業檢測的主流選擇。
- 十二路:科研與高端制造的必備工具。
隨著自動化需求的增長,多通道灰度傳感器將與其他傳感器(如激光雷達、視覺攝像頭)深度融合,推動智能檢測技術的發展。

















![實習技能記錄【2】-----LVGL[基本概念]](http://pic.xiahunao.cn/實習技能記錄【2】-----LVGL[基本概念])
(列表初始化、右值引用和移動語義、類的新默認成員函數、lambda表達式))
