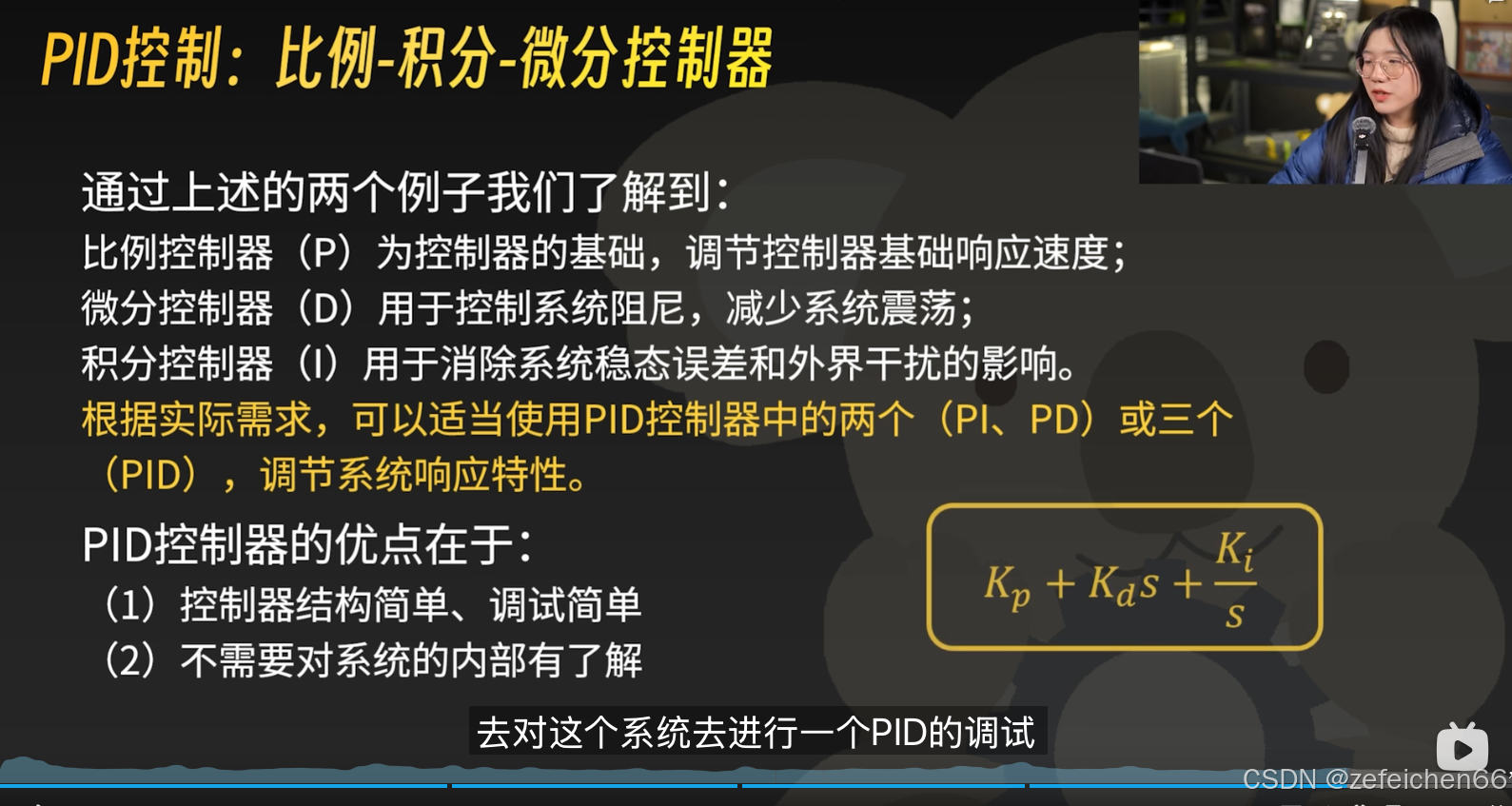
在過程控制中,按偏差的比例(P,Proportional)、積分(I,Integral)和微分(D,Differential)進行控制的PID控制器(亦稱PID調節器)是應用最為廣泛的一種自動控制器。
硬核-
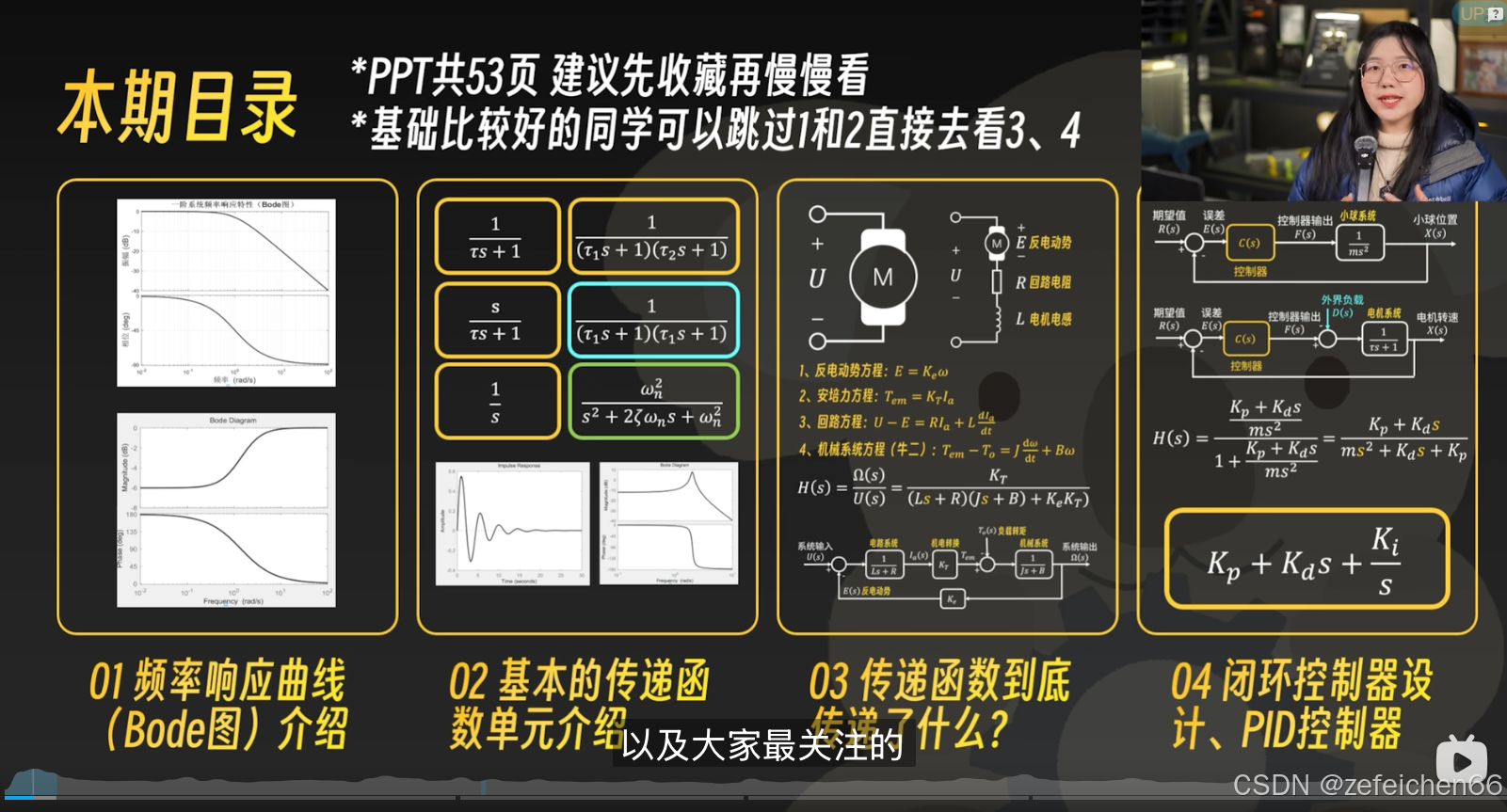
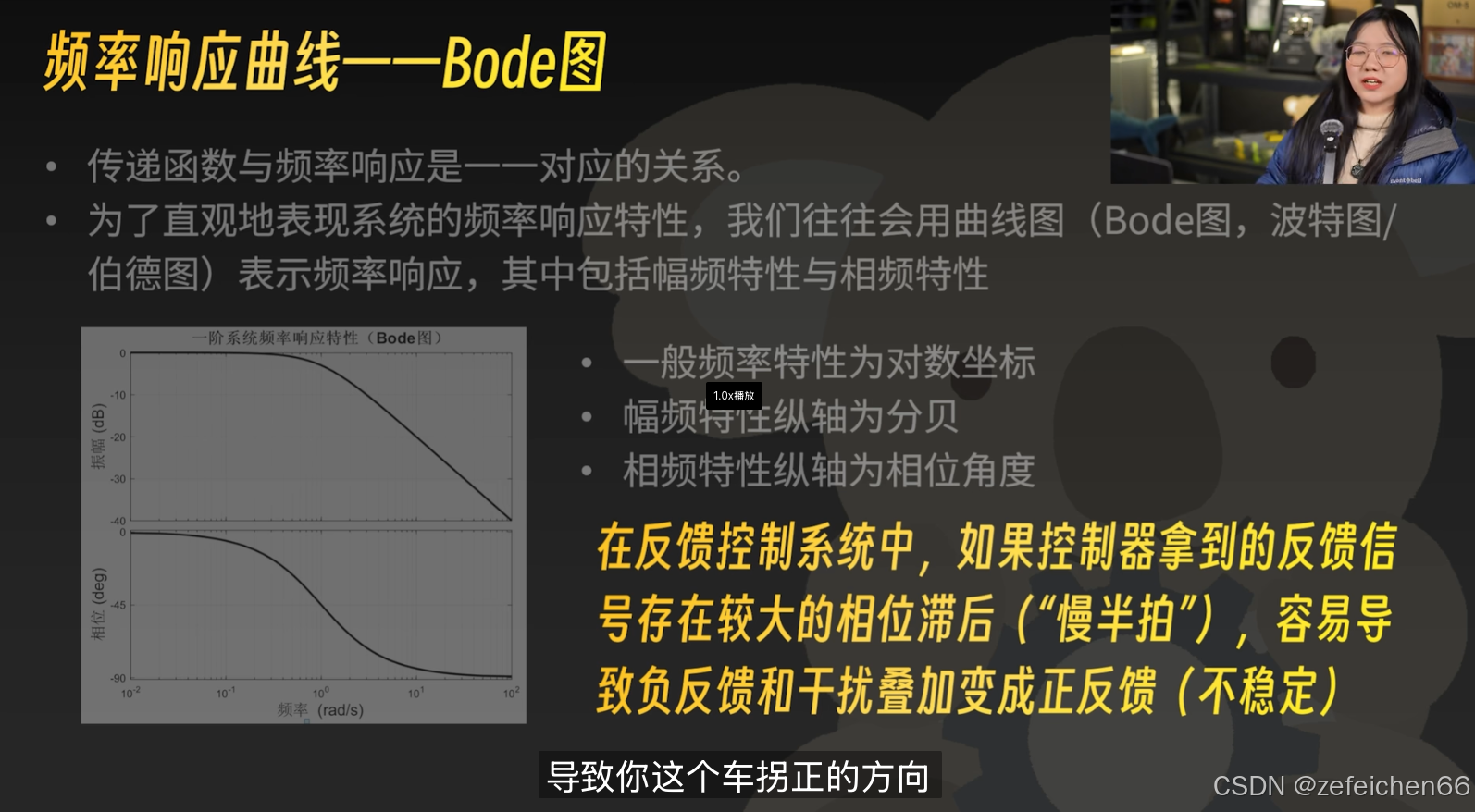
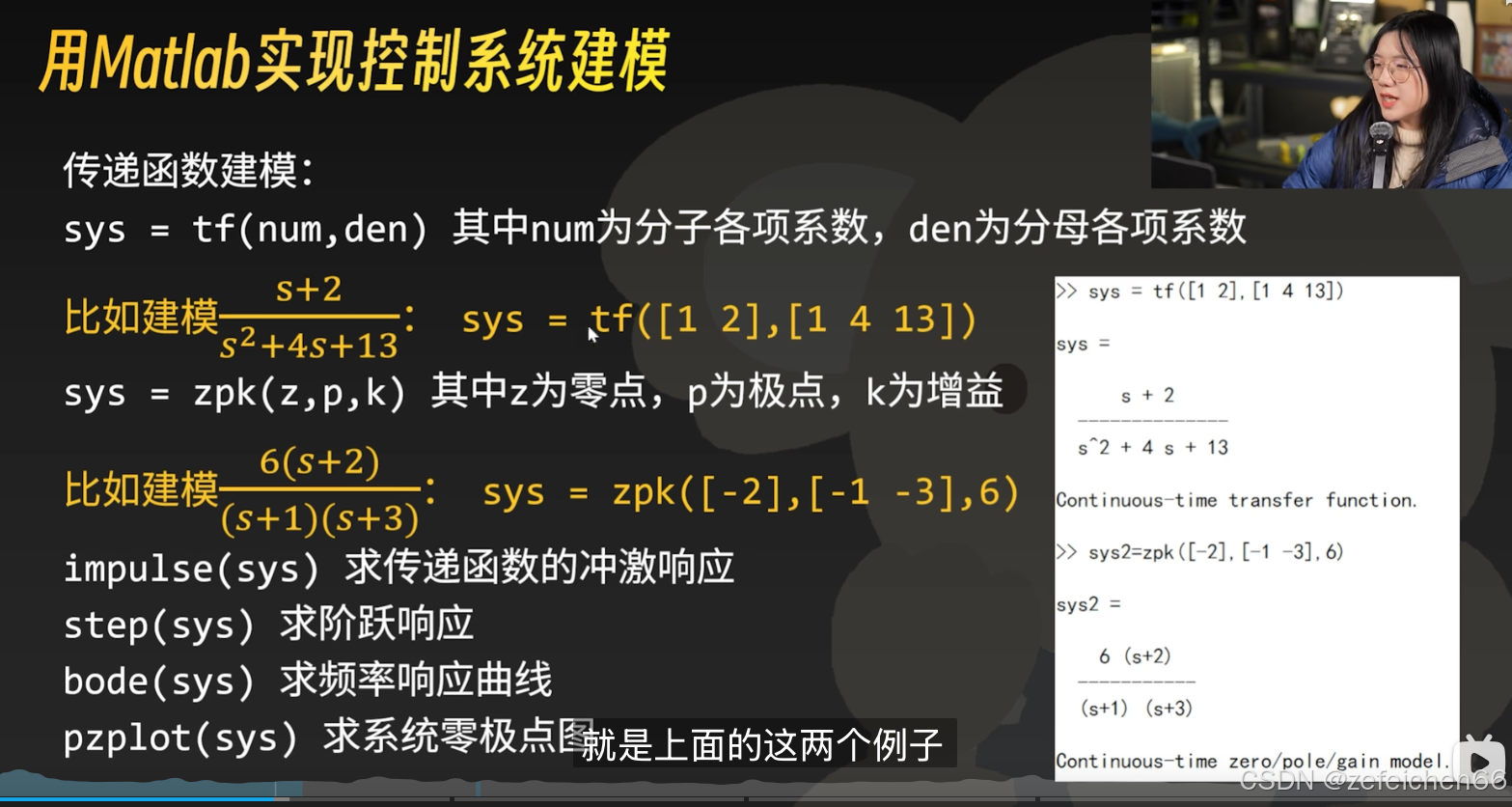
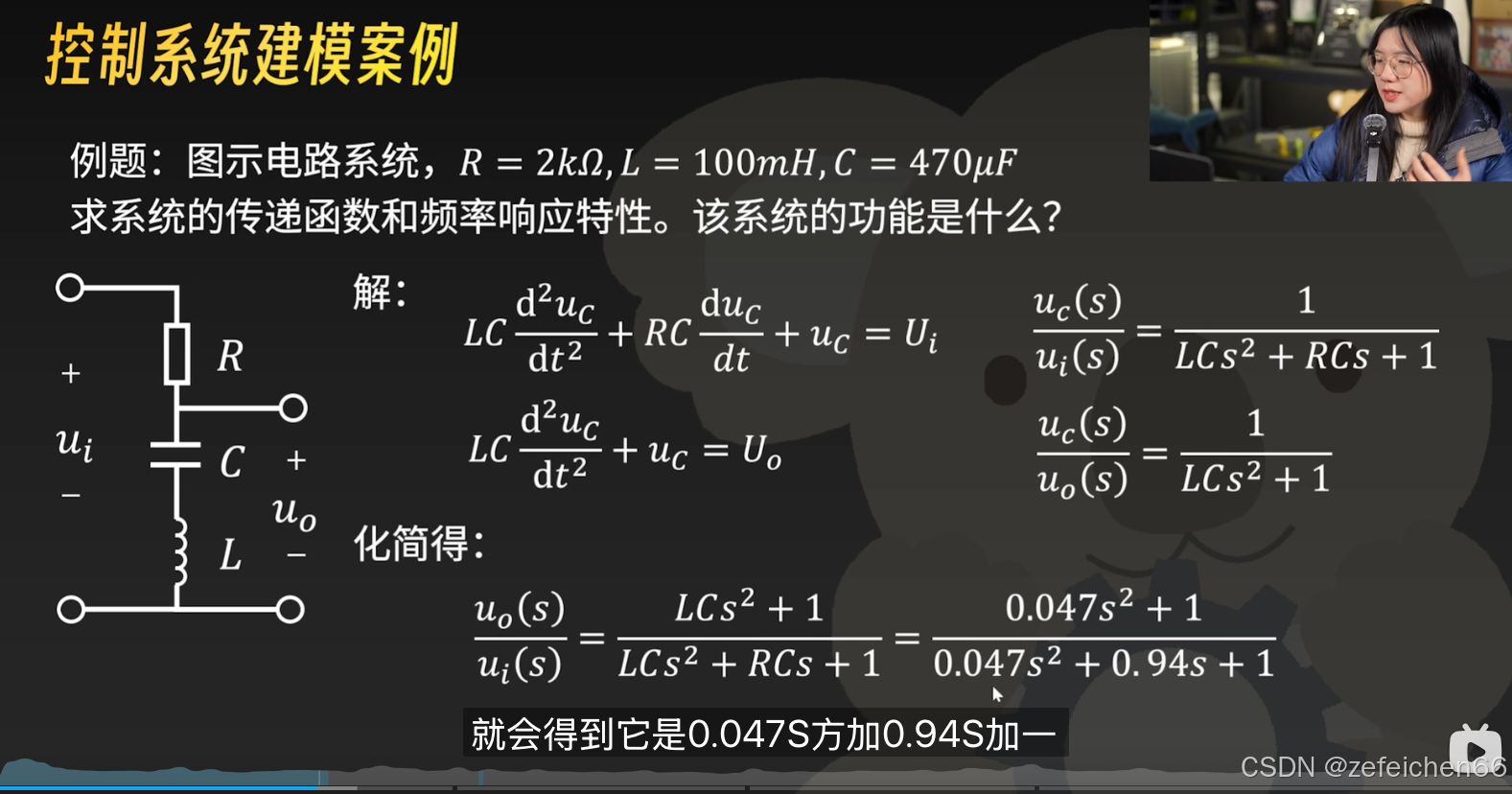
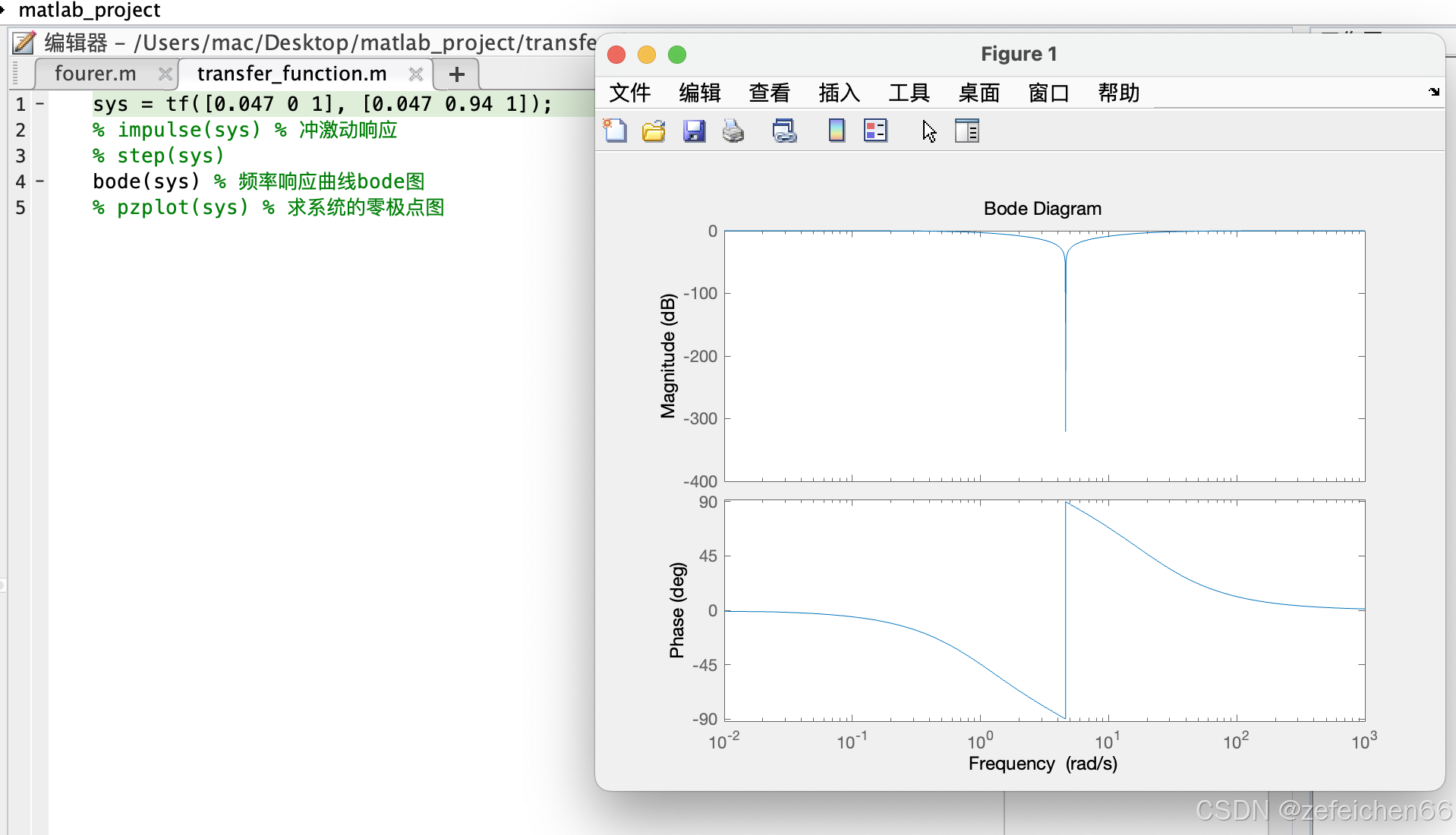
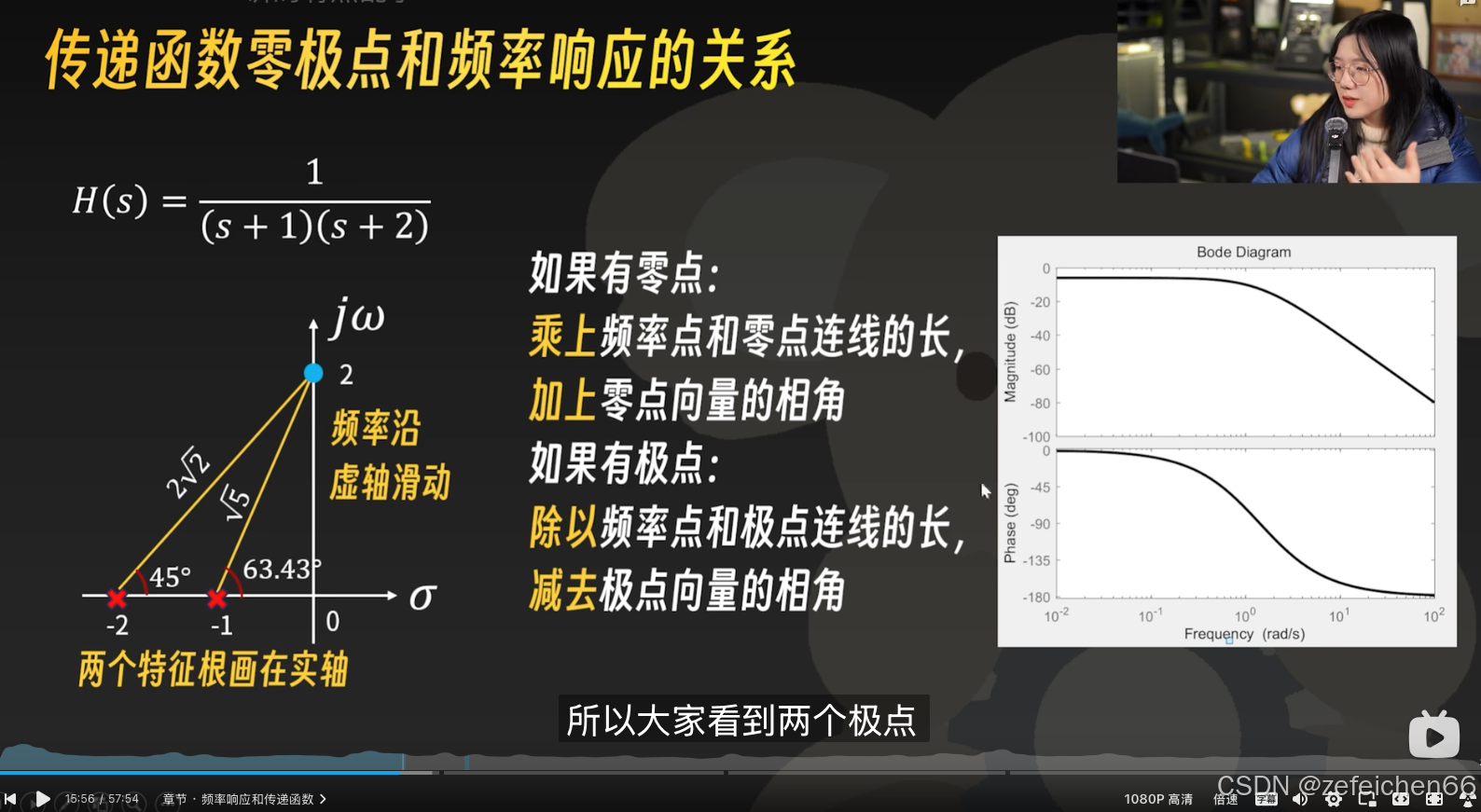
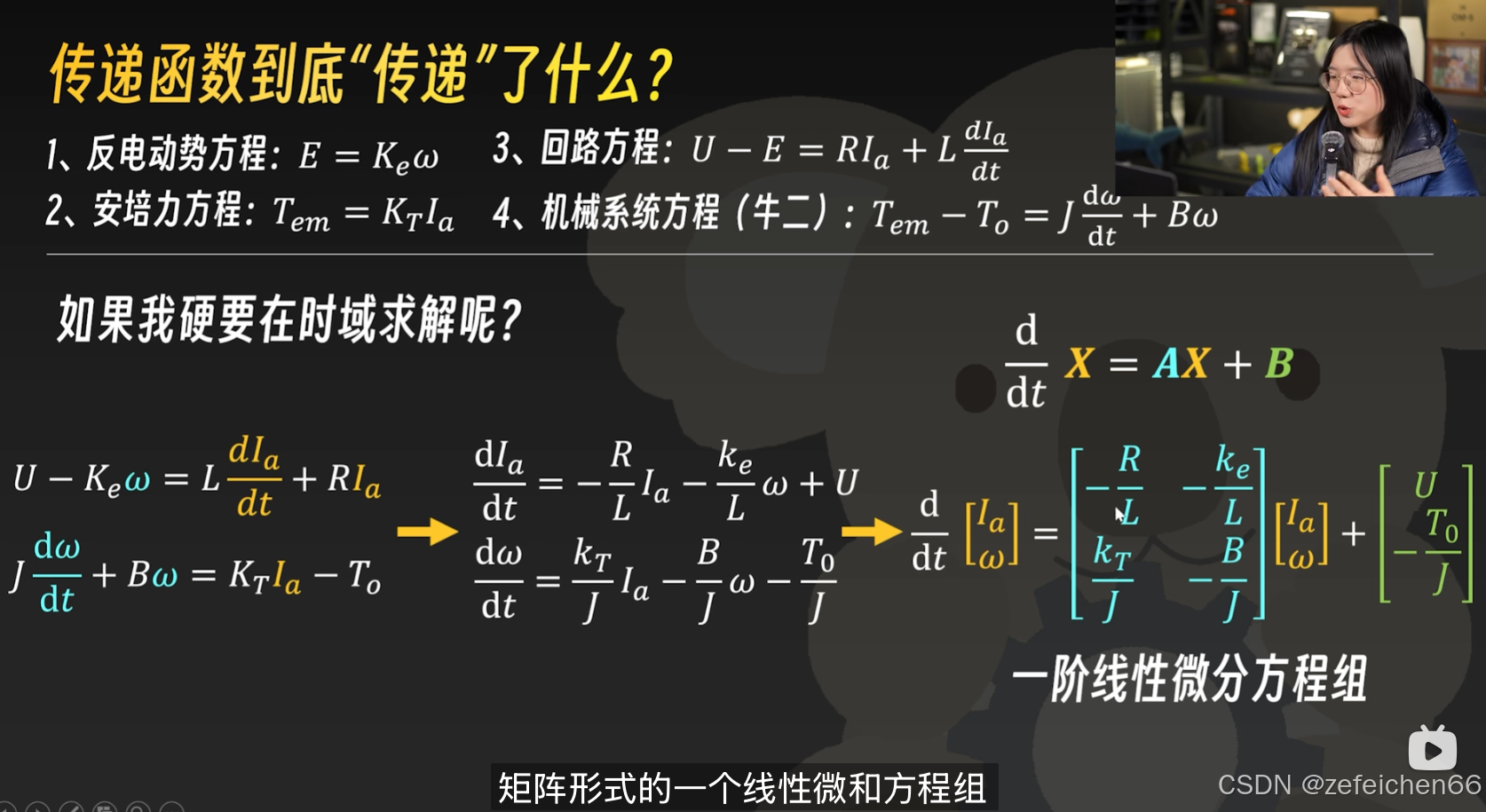
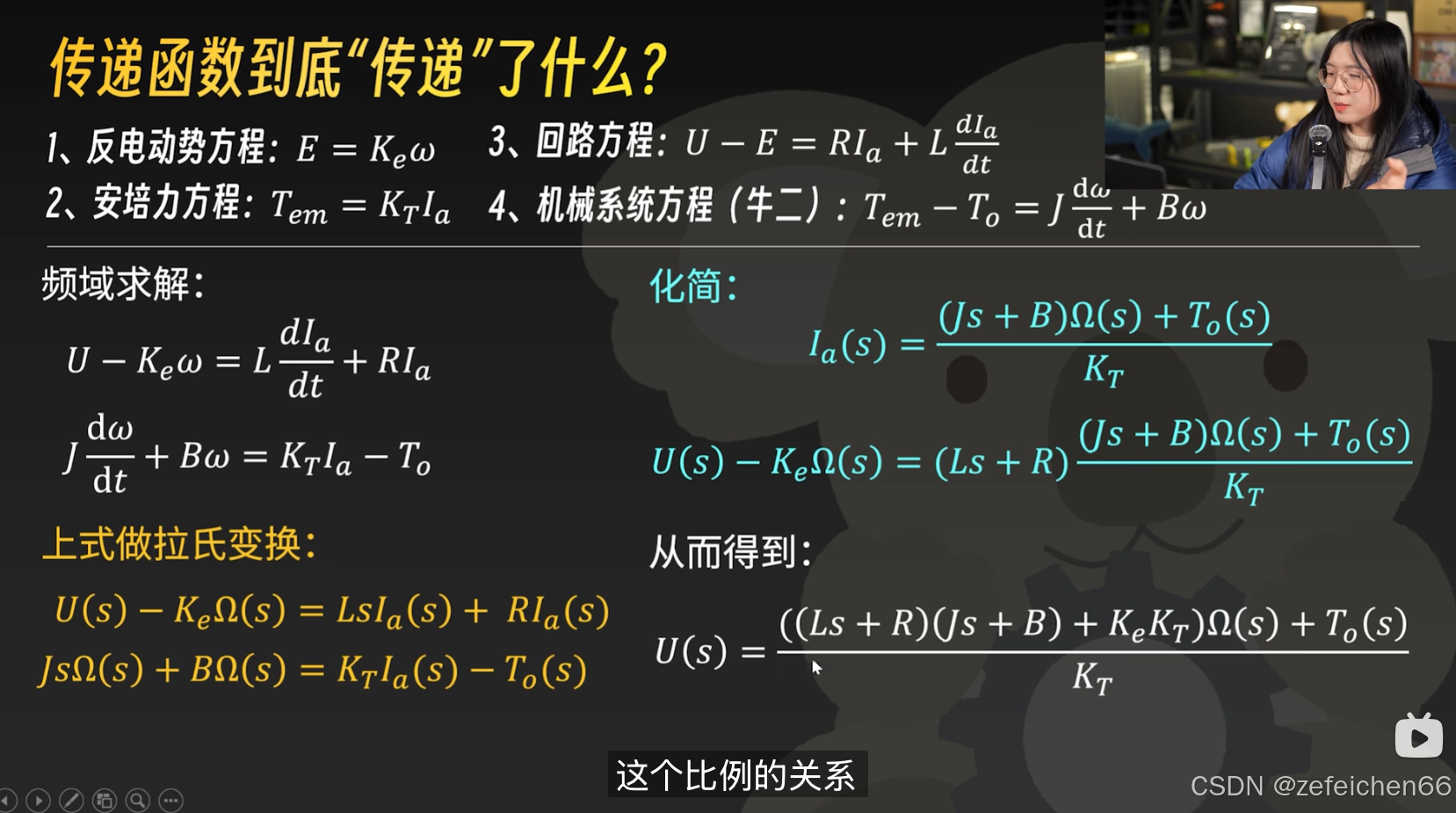
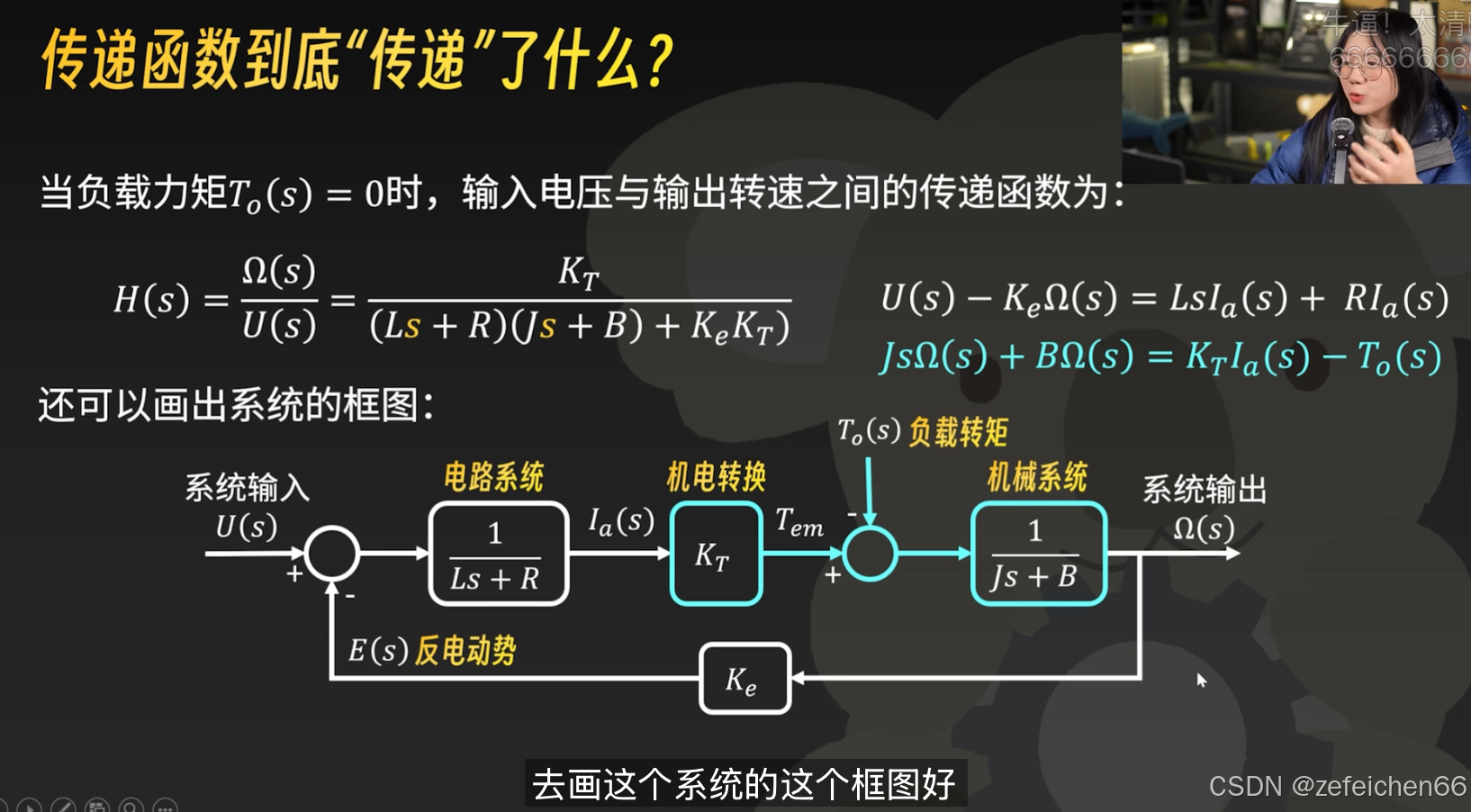
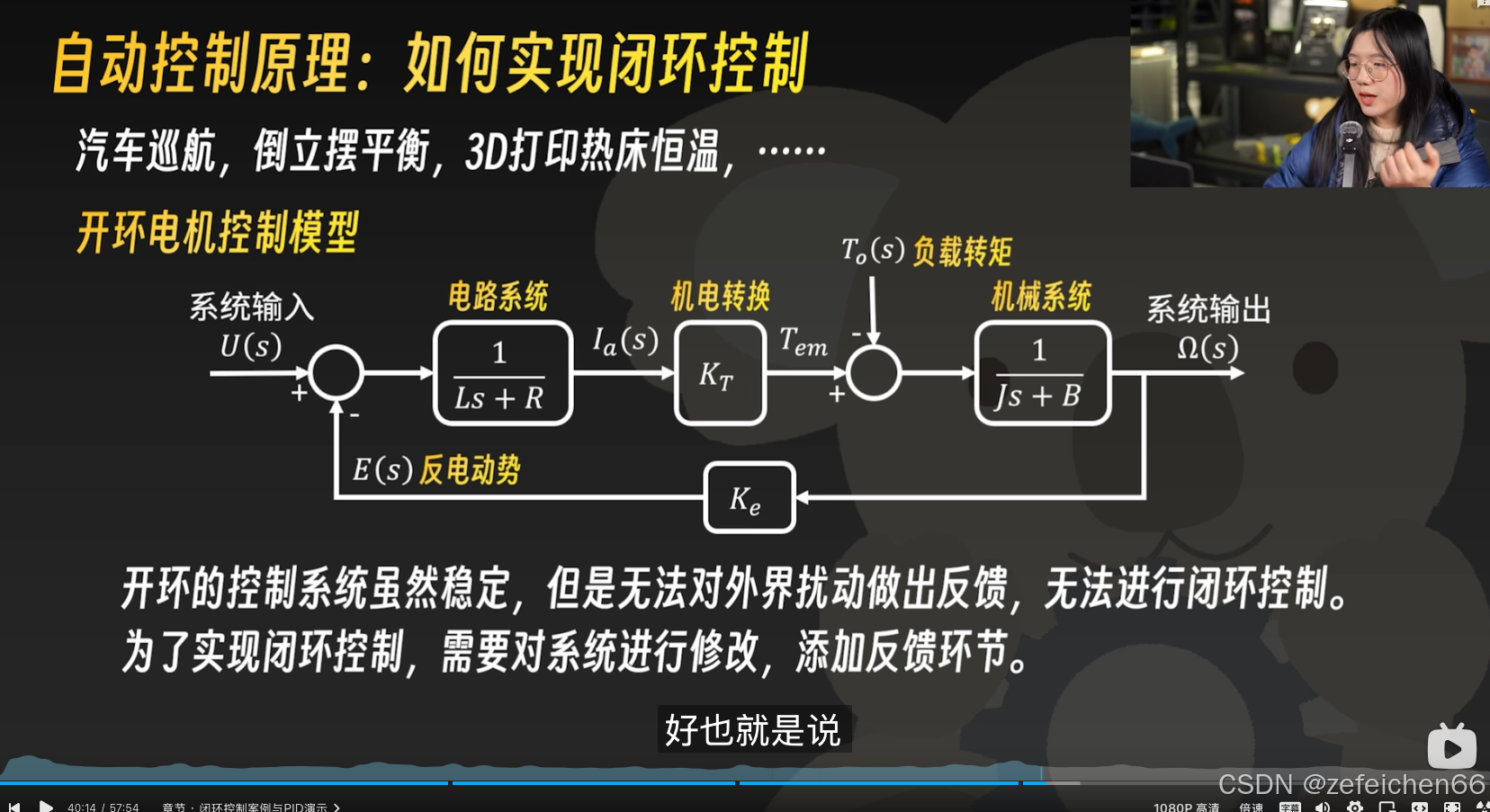
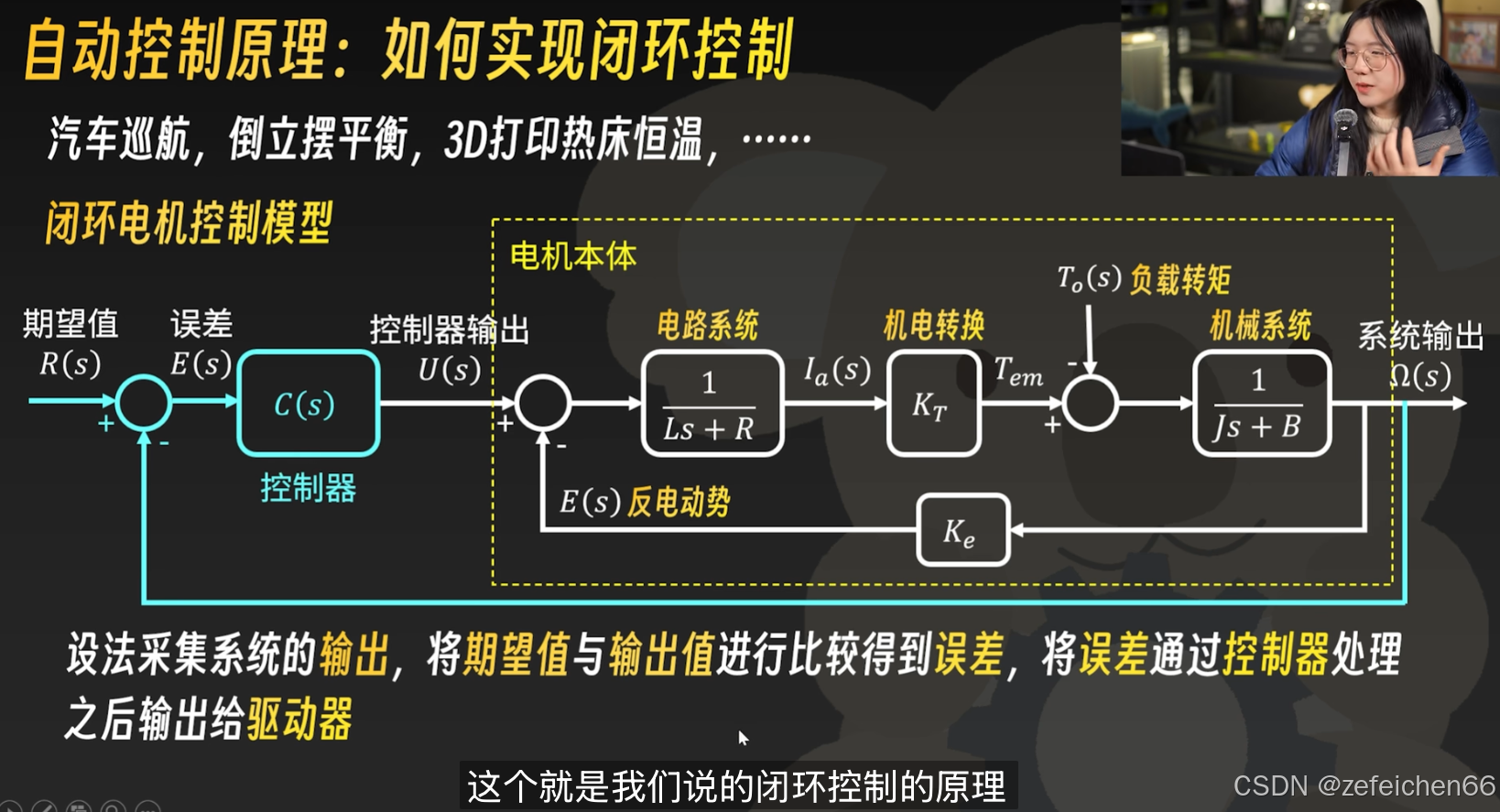
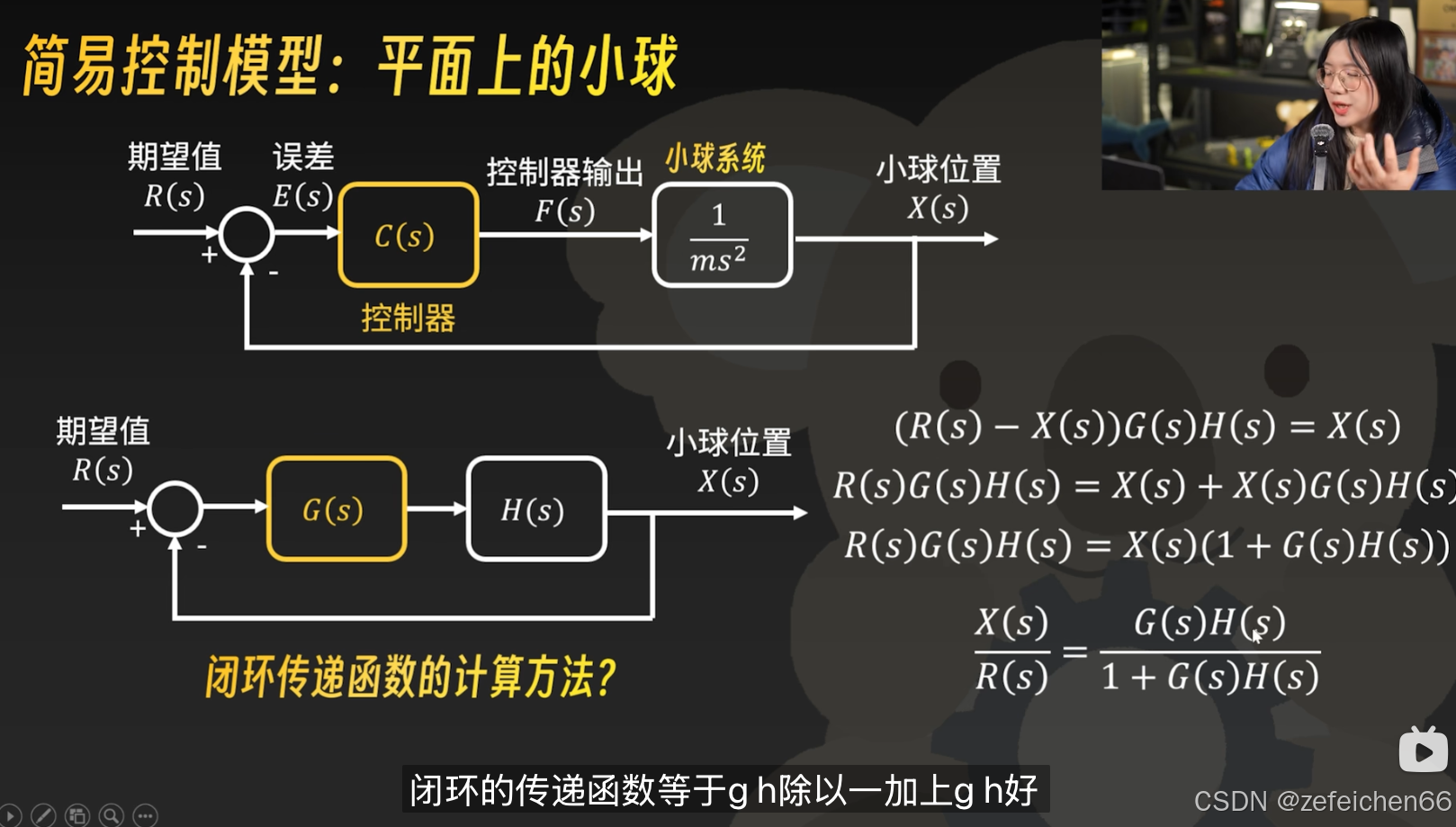
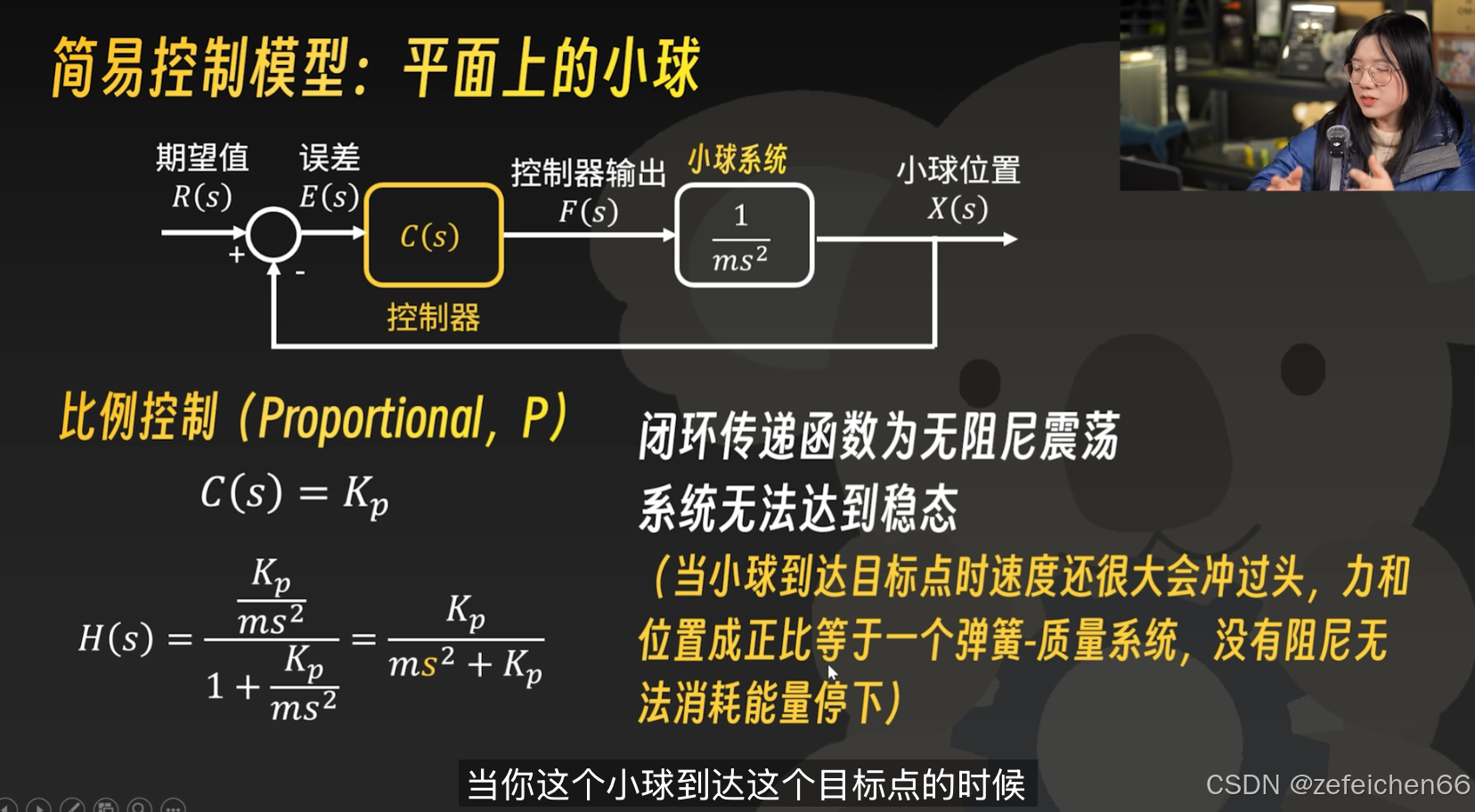
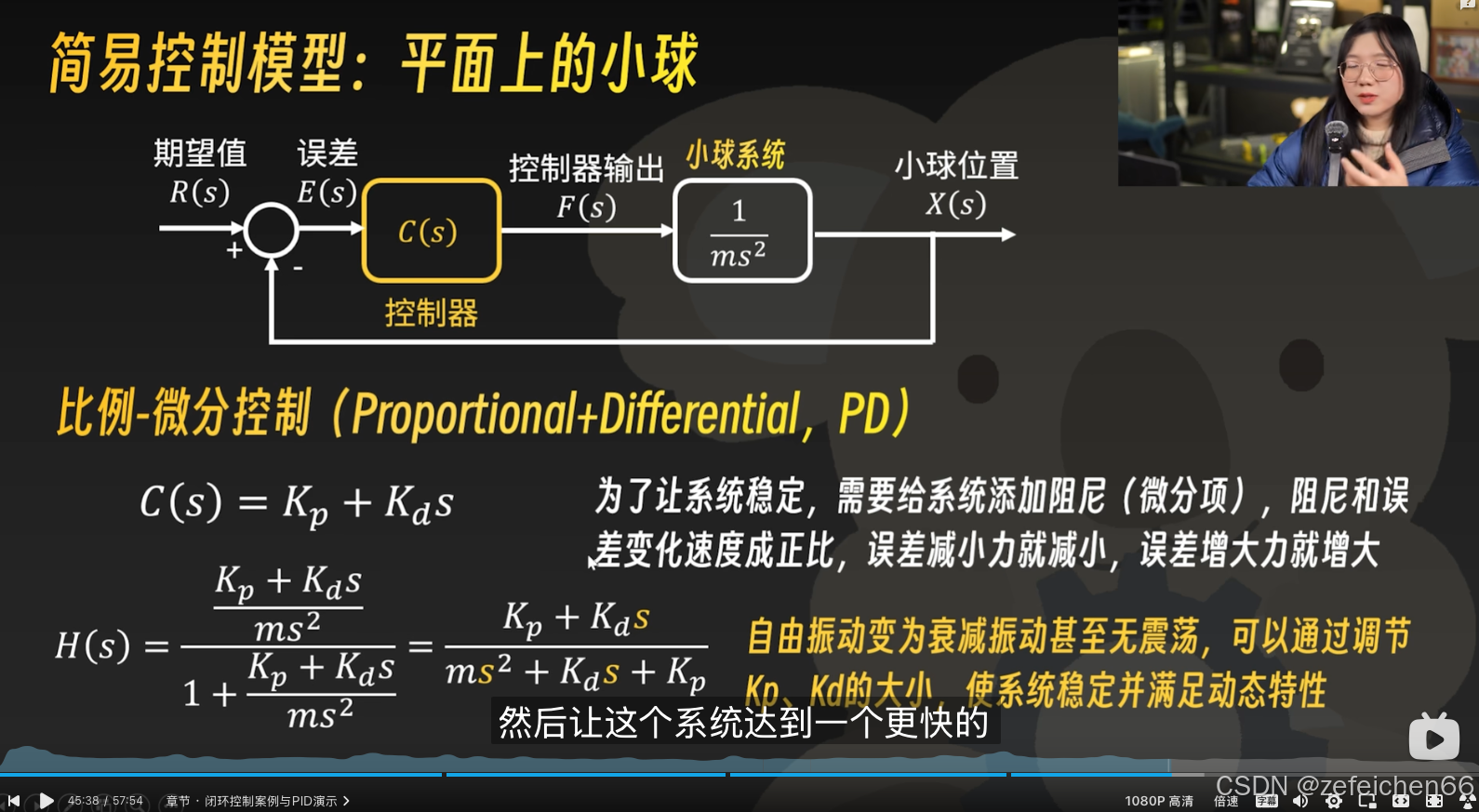
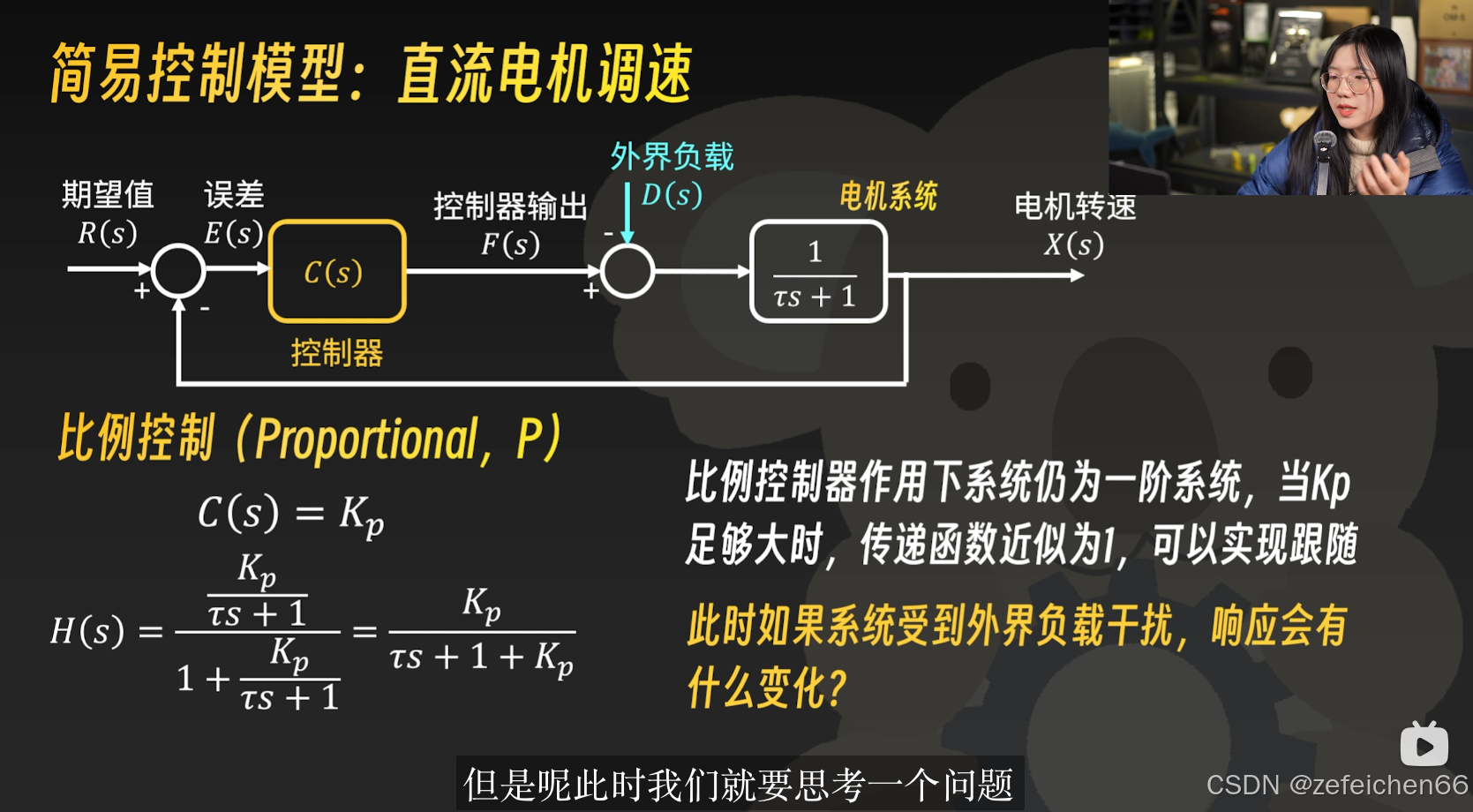
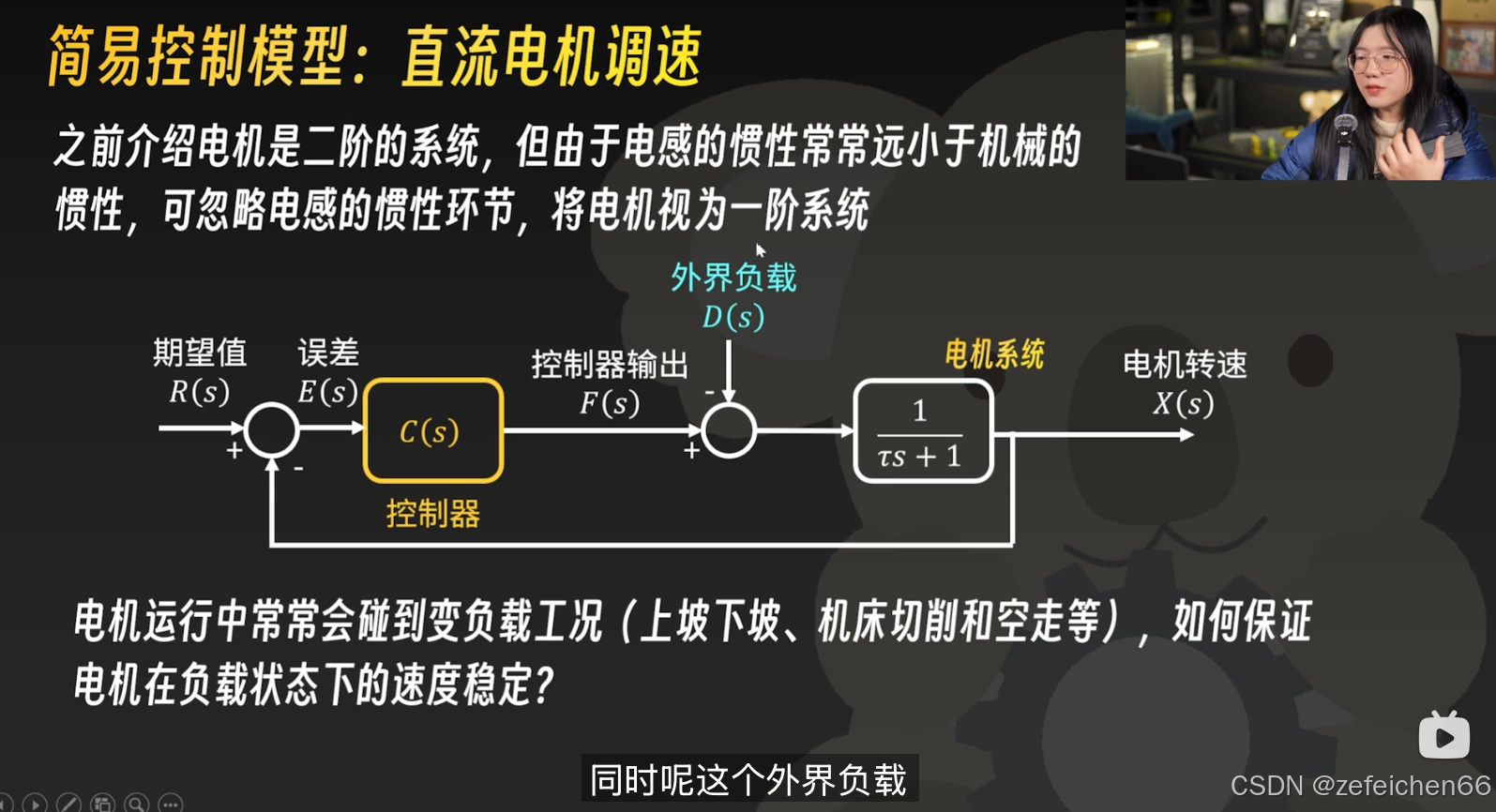
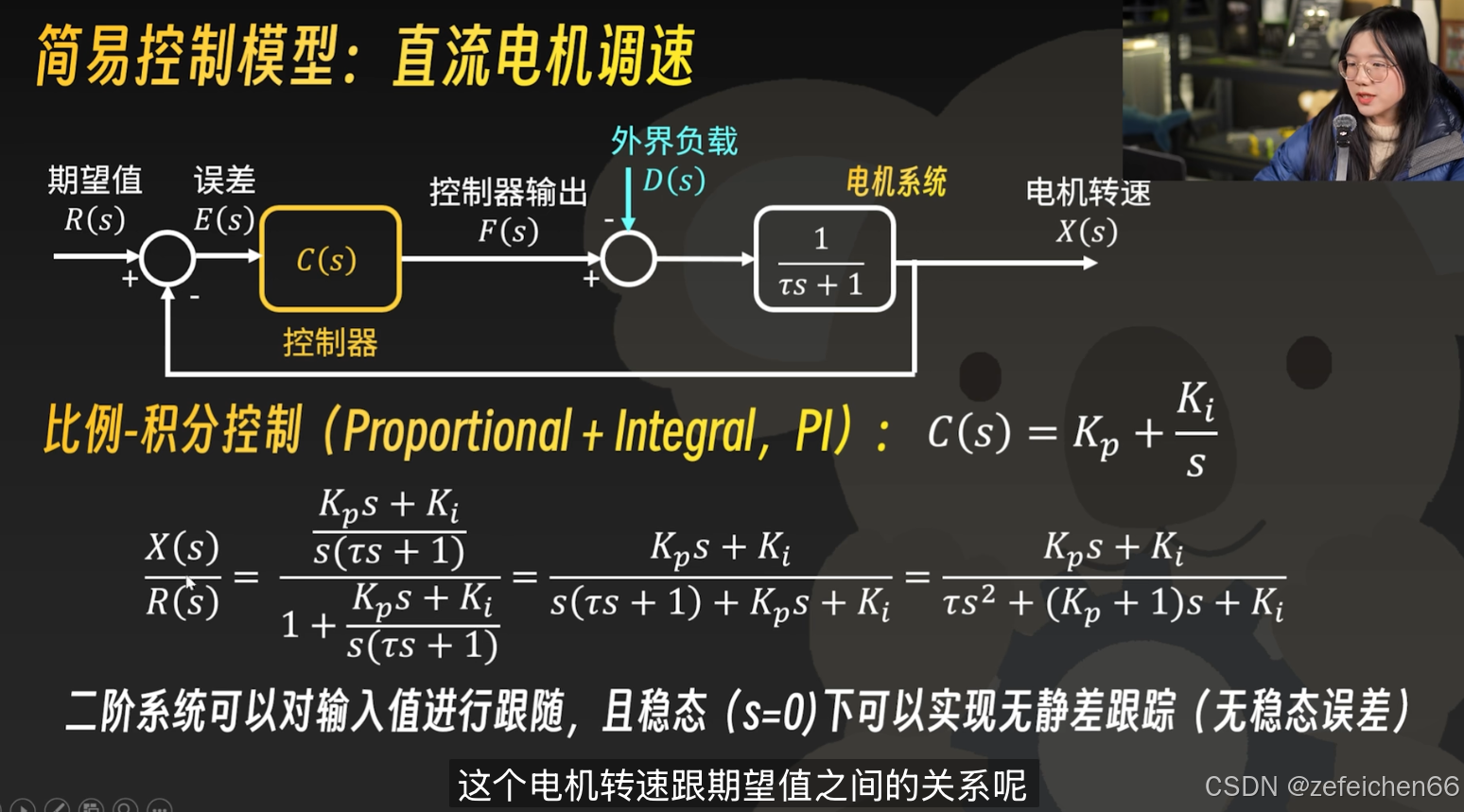
PID控制底層原理是什么?傳遞函數又傳遞了什么?線性系統分析與控制課程 | 自動控制原理 | 考拉學姐講機電控制
游戲
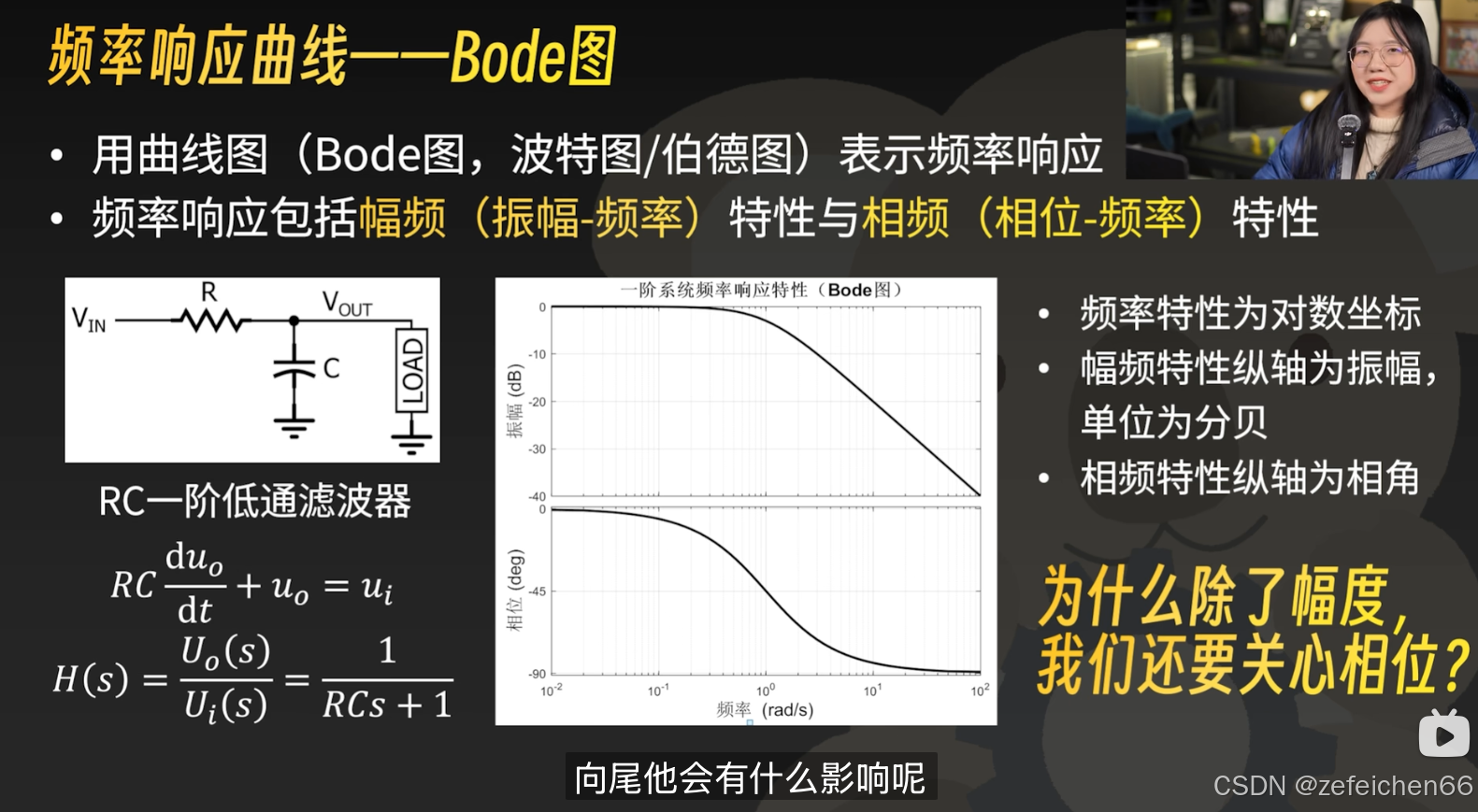
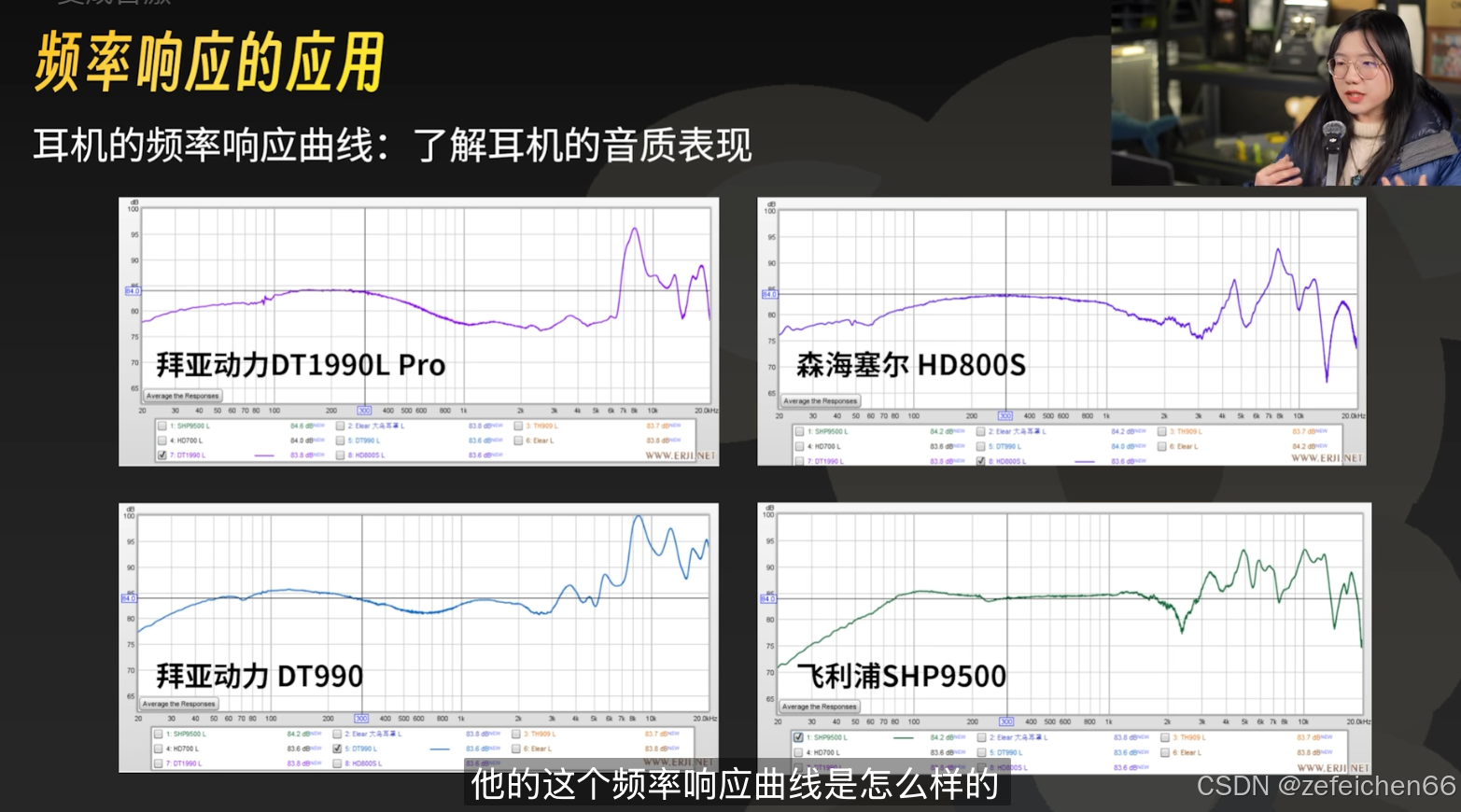
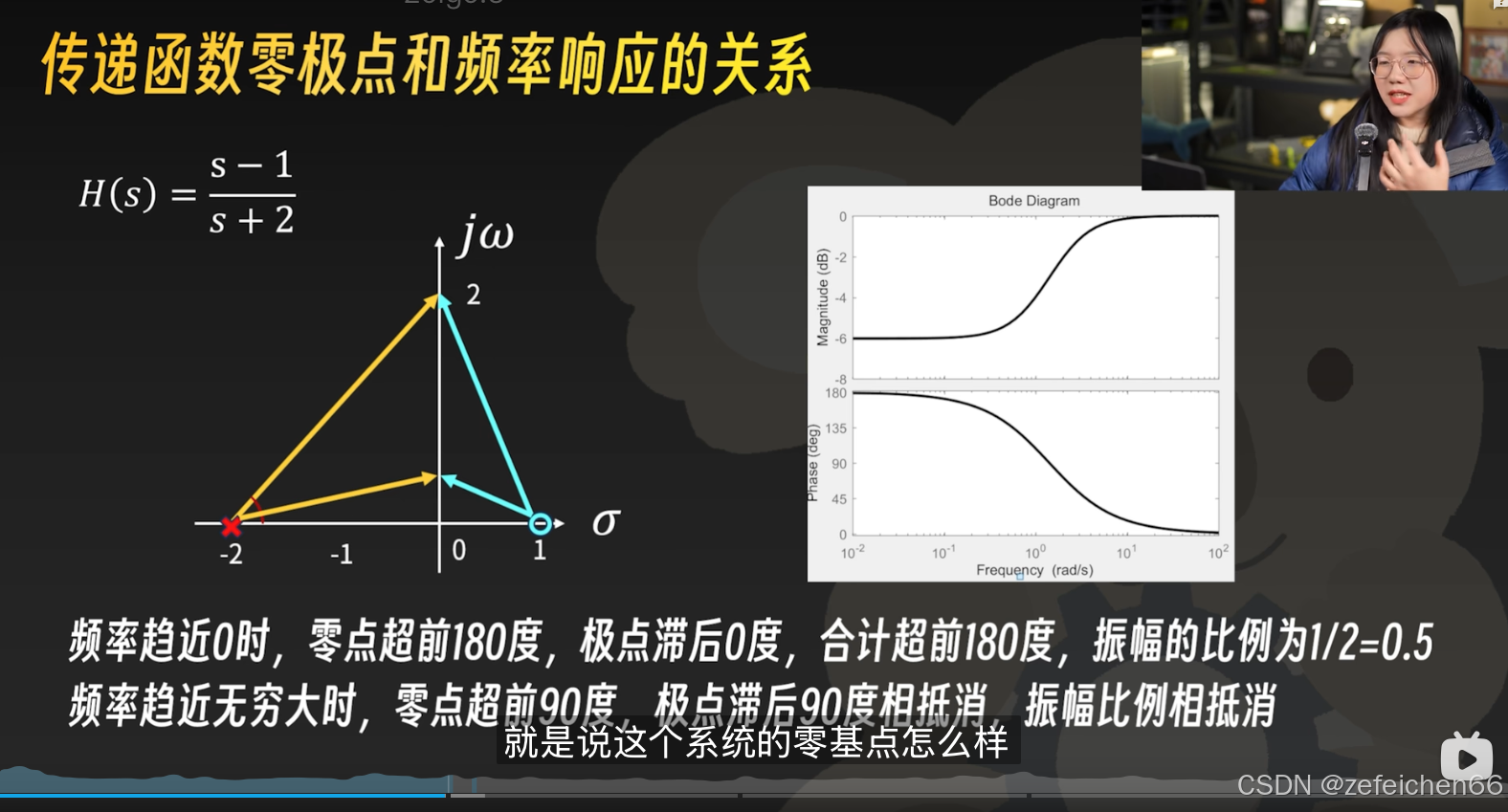
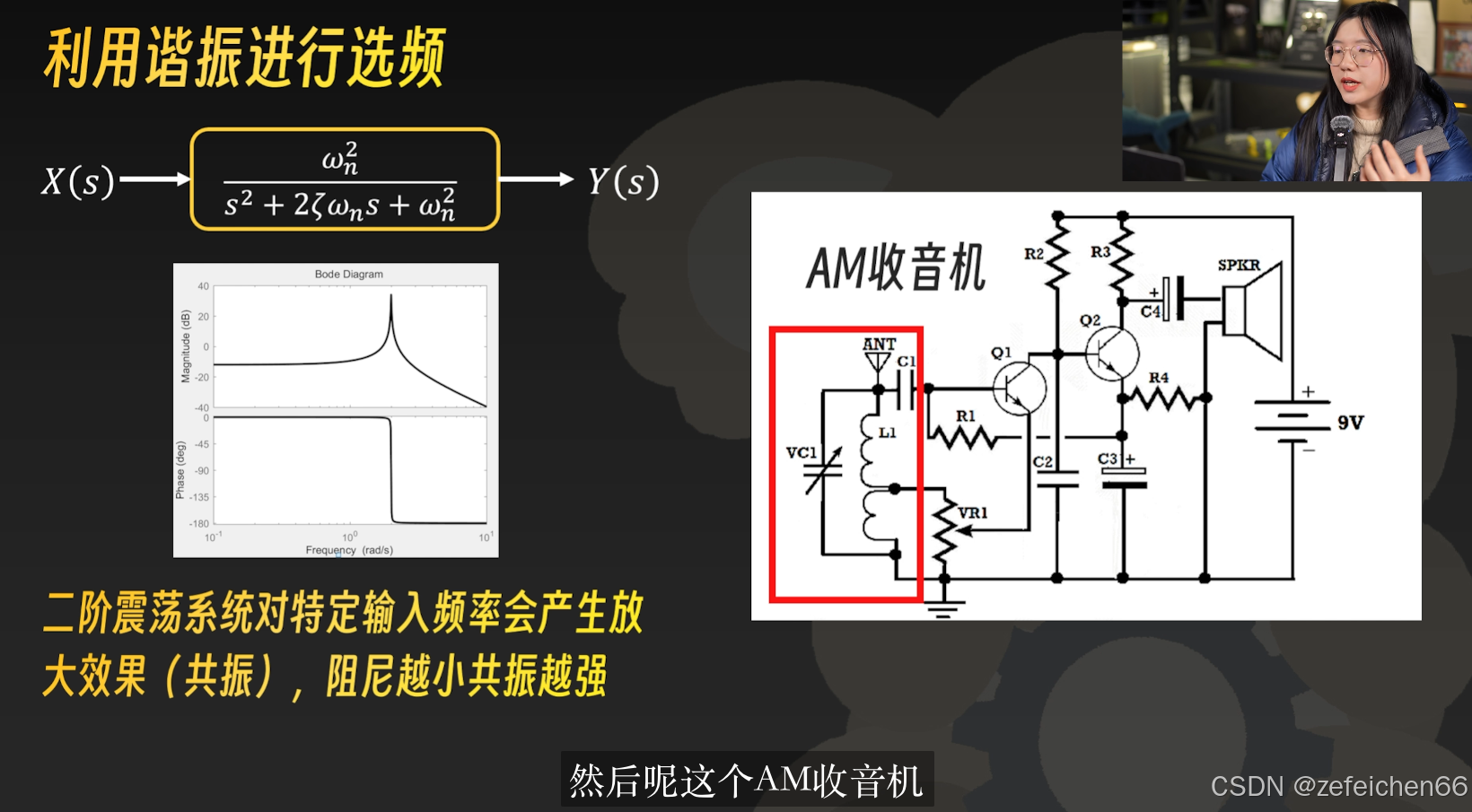
伯德圖是系統頻率響應的一種圖示方法。伯德圖由幅值圖和相角圖組成,兩者都按頻率的對數分度繪制,故伯德圖常也稱為對數坐標圖。伯德圖描述了在電路中輸入信號頻率變化對輸出信號的影響,表達了控制系統輸出信號對輸入信號頻率響應兩方面的變化:增益和相位。增益的單位分貝,簡單可以理解為輸出信號比輸入信號的放大倍數。電壓分貝和放大倍數有直接的對應關系,用y表示電壓分貝,用x表示放大倍數,y=20lg(x)
如何看懂波特圖
伯德圖Ⅰ:怎么理解伯德圖Bode Plot

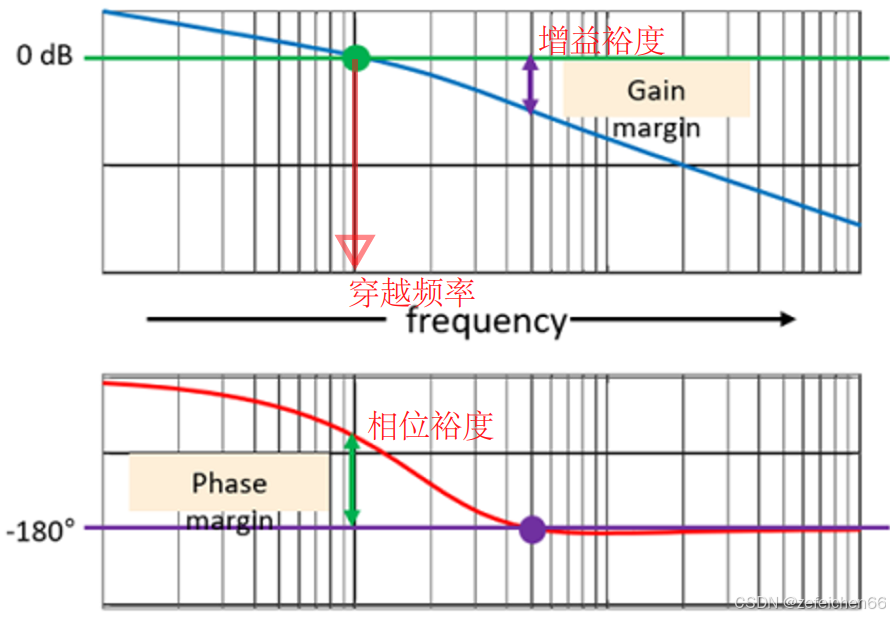
增益裕度和相位裕度
在增益為0dB處,對應穿越頻率,對應著相位裕度。相位裕度是相位響應曲線在穿越頻率點與-180度之間的相位差。
在相位為180度處,對應著增益裕度。增益裕度是增益響應曲線在相位為-180度的頻率點與0dB之間的增益差。
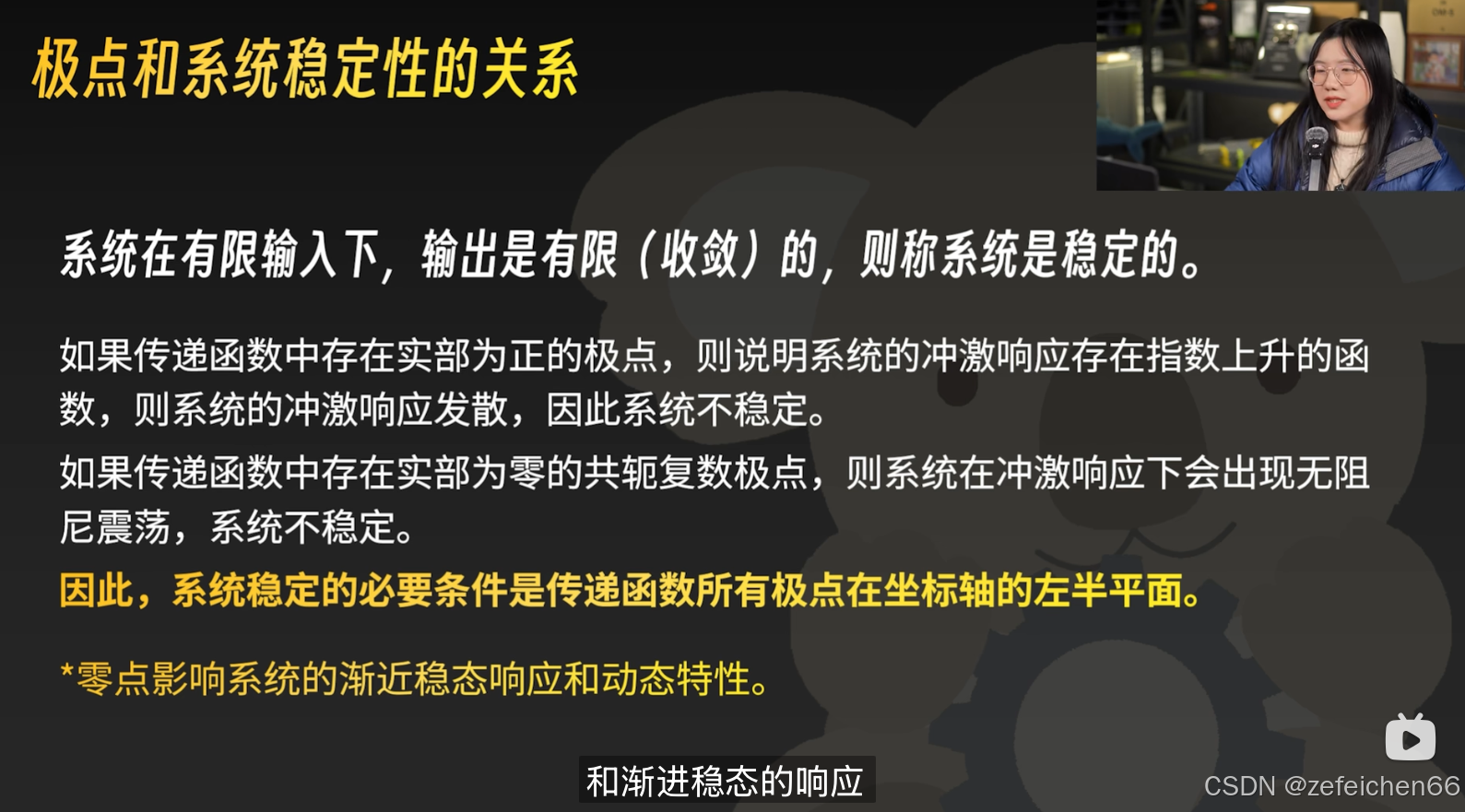
相位裕度、增益裕度表征著系統與不穩定性的“距離”。相位裕度、增益裕度越大,說明控制系統越強健,越穩定。
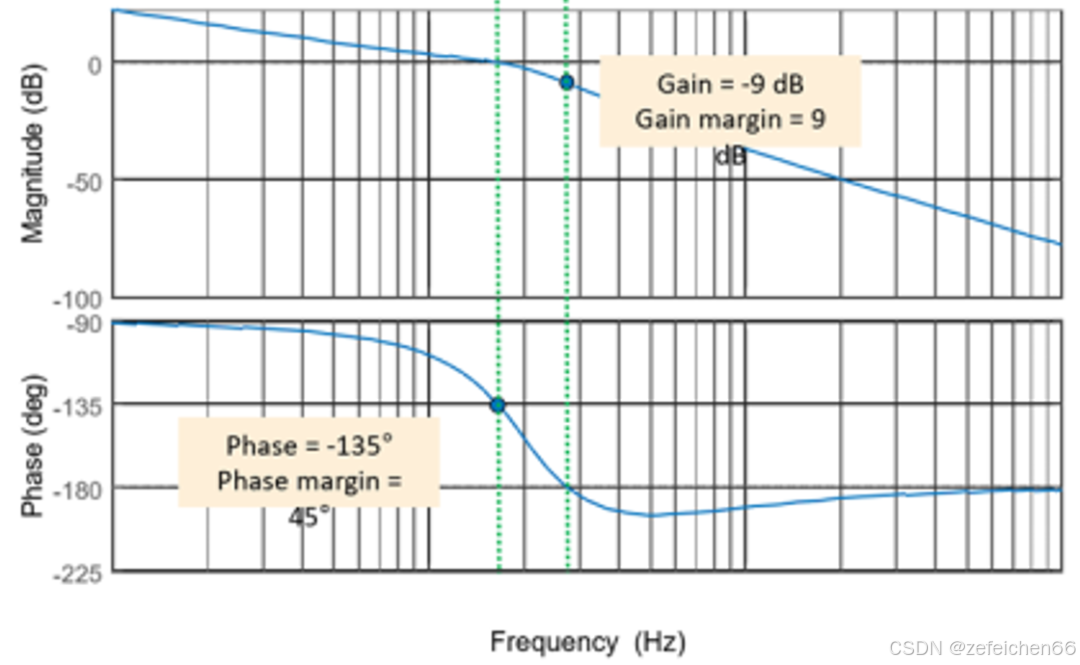
當然,如果相位裕度過大,意味著系統的響應速度慢,所以需要將相位裕度調整到合理范圍內。
下圖在穿越頻率處(0dB),相位裕度為45°。在相位為-180°處,增益裕度為9,可判斷為穩定系統。
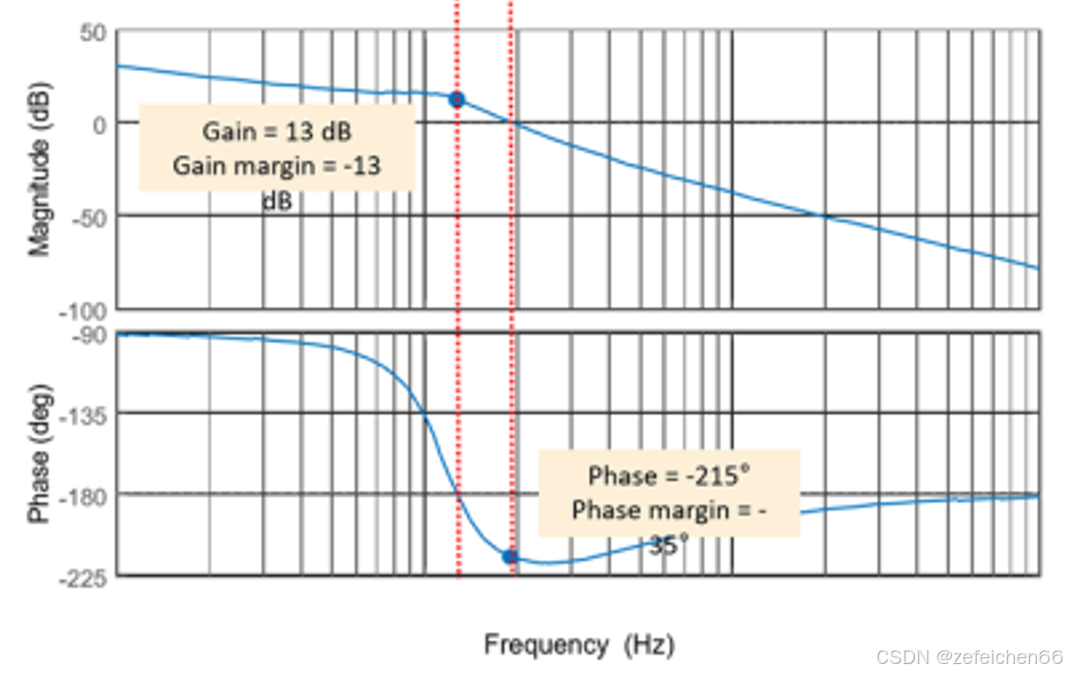
下圖在穿越頻率處(0dB),相位裕度為35°。在相位為-180°處,增益裕度為-13,可判斷為不穩定系統。























頁面谷歌不收錄!必須改回分頁嗎?)







