Robosuite框架是一個用于機器人模擬和控制的強大工具,支持多種類型的機器人。
官方文檔:Overview — robosuite 1.5 documentation
開源地址:https://github.com/ARISE-Initiative/robosuite
目錄
1、通過鍵盤或SpaceMouse遠程控制機器人
2、選擇機器人夾抓
3、夾抓控制
4、記錄軌跡數據并回放
5、多種機器人任務執行
1、通過鍵盤或SpaceMouse遠程控制機器人
主要功能包括:
-
遠程控制:通過鍵盤或 SpaceMouse 遠程控制機器人的末端執行器。
-
多臂支持:支持單臂和雙臂環境,適應不同的任務需求。
-
控制器選擇:支持多種控制器,適應不同的控制策略。
-
設備靈敏度調整:通過參數調整輸入設備的靈敏度,適應不同的操作需求。
運行效果:
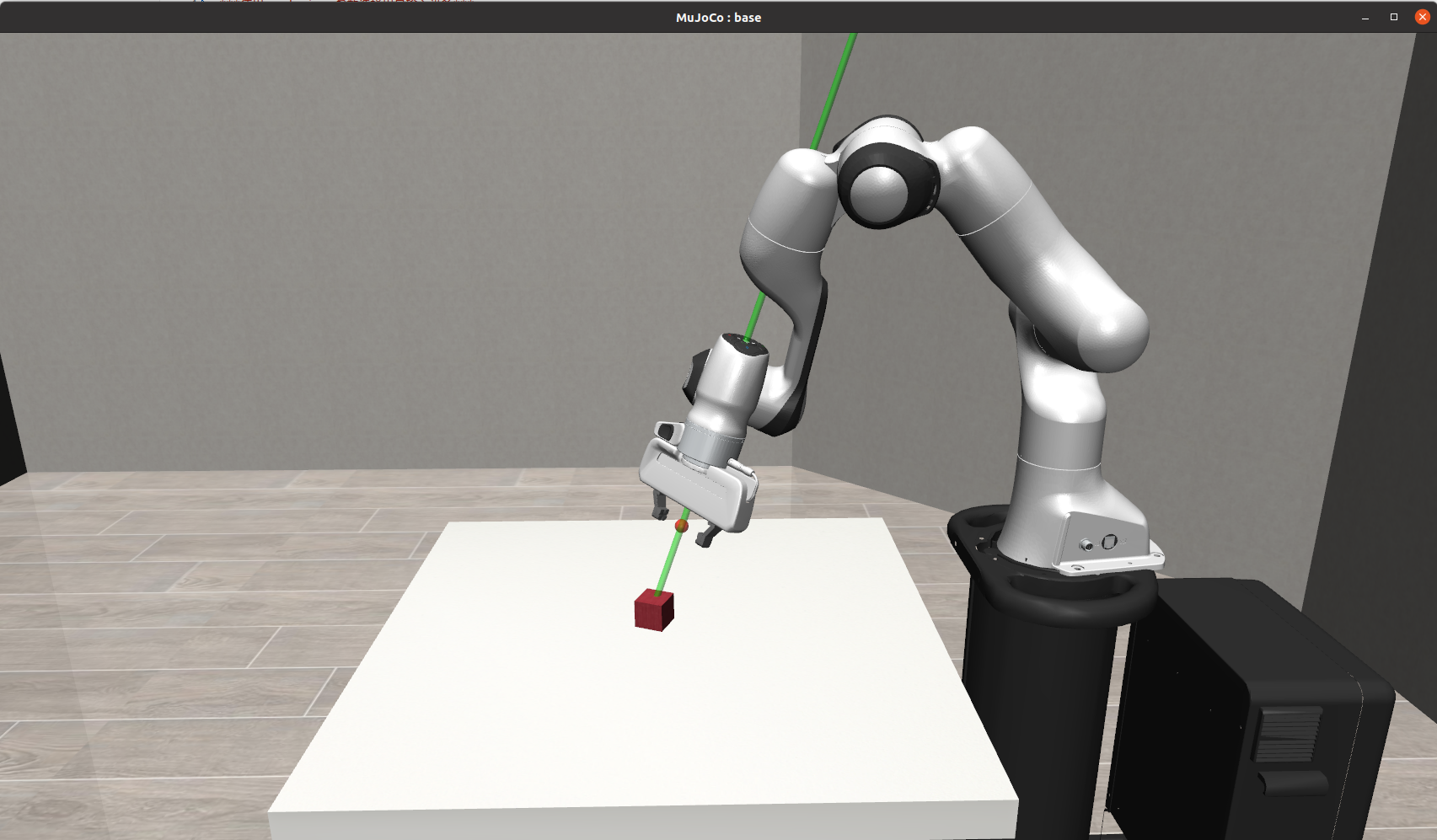
控制機械臂移動的鍵盤按鍵:H、Y、P、O、; 、.
示例代碼
import argparse
import timeimport numpy as npimport robosuite as suite
from robosuite import load_composite_controller_config
from robosuite.controllers.composite.composite_controller import WholeBody
from robosuite.wrappers import VisualizationWrapperif __name__ == "__main__":parser = argparse.ArgumentParser()parser.add_argument("--environment", type=str, default="Lift") # 環境名稱parser.add_argument("--robots", nargs="+", type=str, default="Panda", help="使用的機器人") # 機器人名稱parser.add_argument("--config", type=str, default="default", help="指定環境配置(如果需要)") # 環境配置parser.add_argument("--arm", type=str, default="right", help="控制的臂(例如雙臂)'right' 或 'left'") # 控制的臂parser.add_argument("--switch-on-grasp", action="store_true", help="在抓手動作時切換抓手控制") # 抓手切換parser.add_argument("--toggle-camera-on-grasp", action="store_true", help="在抓手動作時切換相機角度") # 相機切換parser.add_argument("--controller",type=str,default=None,help="選擇控制器。可以是通用名稱(例如 'BASIC' 或 'WHOLE_BODY_MINK_IK')或 json 文件(參見 robosuite/controllers/config 示例)或 None(使用機器人的默認控制器(如果存在))",) # 控制器選擇parser.add_argument("--device", type=str, default="keyboard") # 輸入設備parser.add_argument("--pos-sensitivity", type=float, default=1.0, help="位置輸入的縮放比例") # 位置靈敏度parser.add_argument("--rot-sensitivity", type=float, default=1.0, help="旋轉輸入的縮放比例") # 旋轉靈敏度parser.add_argument("--max_fr",default=20,type=int,help="當模擬運行速度超過指定幀率時暫停;20 fps 為實時。",) # 最大幀率args = parser.parse_args()# 加載控制器配置controller_config = load_composite_controller_config(controller=args.controller,robot=args.robots[0],)# 創建參數配置config = {"env_name": args.environment,"robots": args.robots,"controller_configs": controller_config,}# 檢查是否使用多臂環境,并設置環境配置if "TwoArm" in args.environment:config["env_configuration"] = args.configelse:args.config = None# 創建環境env = suite.make(**config,has_renderer=True,has_offscreen_renderer=False,render_camera="agentview",ignore_done=True,use_camera_obs=False,reward_shaping=True,control_freq=20,hard_reset=False,)# 使用可視化包裝器包裝環境env = VisualizationWrapper(env, indicator_configs=None)# 設置數字打印選項np.set_printoptions(formatter={"float": lambda x: "{0:0.3f}".format(x)})# 初始化設備if args.device == "keyboard":from robosuite.devices import Keyboarddevice = Keyboard(env=env, pos_sensitivity=args.pos_sensitivity, rot_sensitivity=args.rot_sensitivity)env.viewer.add_keypress_callback(device.on_press)elif args.device == "spacemouse":from robosuite.devices import SpaceMousedevice = SpaceMouse(env=env, pos_sensitivity=args.pos_sensitivity, rot_sensitivity=args.rot_sensitivity)elif args.device == "mjgui":from robosuite.devices.mjgui import MJGUIdevice = MJGUI(env=env)else:raise Exception("無效的設備選擇:請選擇 'keyboard' 或 'spacemouse'。")while True:# 重置環境obs = env.reset()# 設置渲染cam_id = 0num_cam = len(env.sim.model.camera_names)env.render()# 初始化在重置之間需要維護的變量last_grasp = 0# 初始化設備控制device.start_control()all_prev_gripper_actions = [{f"{robot_arm}_gripper": np.repeat([0], robot.gripper[robot_arm].dof)for robot_arm in robot.armsif robot.gripper[robot_arm].dof > 0}for robot in env.robots]# 循環直到從輸入中獲得重置或任務完成while True:start = time.time()# 設置活動機器人active_robot = env.robots[device.active_robot]# 獲取最新的動作input_ac_dict = device.input2action()# 如果動作為空,則這是一個重置,應該退出if input_ac_dict is None:breakfrom copy import deepcopyaction_dict = deepcopy(input_ac_dict) # {}# 設置臂動作for arm in active_robot.arms:if isinstance(active_robot.composite_controller, WholeBody): # 輸入類型傳遞給關節動作策略controller_input_type = active_robot.composite_controller.joint_action_policy.input_typeelse:controller_input_type = active_robot.part_controllers[arm].input_typeif controller_input_type == "delta":action_dict[arm] = input_ac_dict[f"{arm}_delta"]elif controller_input_type == "absolute":action_dict[arm] = input_ac_dict[f"{arm}_abs"]else:raise ValueError# 維護每個機器人的抓手狀態,但只更新活動機器人的動作env_action = [robot.create_action_vector(all_prev_gripper_actions[i]) for i, robot in enumerate(env.robots)]env_action[device.active_robot] = active_robot.create_action_vector(action_dict)env_action = np.concatenate(env_action)for gripper_ac in all_prev_gripper_actions[device.active_robot]:all_prev_gripper_actions[device.active_robot][gripper_ac] = action_dict[gripper_ac]env.step(env_action)env.render()# 如果必要,限制幀率if args.max_fr is not None:elapsed = time.time() - startdiff = 1 / args.max_fr - elapsedif diff > 0:time.sleep(diff)代碼關鍵要點:?
-
輸入設備:
-
支持鍵盤和 SpaceMouse 兩種輸入設備。
-
鍵盤提供 6 自由度(6-DoF)控制命令,通過按鍵實現。
-
SpaceMouse 提供 6 自由度(6-DoF)控制命令,通過鼠標移動實現。
-
-
控制器選擇:
-
可以選擇逆運動學控制器(ik)或操作空間控制器(osc)。
-
ik 的旋轉輸入相對于末端執行器坐標系,osc 的旋轉輸入相對于全局坐標系(即:靜態/相機坐標系)。
-
-
環境配置:
-
支持單臂和雙臂環境。
-
雙臂環境可以配置為平行(parallel)或相對(opposed)。
-
可以選擇控制的臂(right 或 left)。
-
-
設備靈敏度:通過
--pos_sensitivity和--rot_sensitivity參數調整位置和旋轉輸入的靈敏度。 -
主循環:
-
通過設備獲取用戶輸入,轉換為機器人動作。
-
使用
env.step執行動作并渲染環境。 -
限制幀率以確保實時運行。
-
備注信息:
***使用以下參數選擇環境特定設置***--environment:要執行的任務,例如:"Lift"、"TwoArmPegInHole"、"NutAssembly" 等。--robots:執行任務的機器人。可以是以下之一:{"Panda", "Sawyer", "IIWA", "Jaco", "Kinova3", "UR5e", "Baxter"}。注意,環境包含合理性檢查,"TwoArm..." 環境只接受兩個機器人名稱的元組或一個雙臂機器人名稱,其他環境只接受一個單臂機器人名稱。--config:僅適用于 "TwoArm..." 環境。指定任務所需的機器人配置。選項有 {"parallel" 和 "opposed"}- "parallel":設置環境,使兩個機器人并排站立,面向同一方向。需要在 --robots 參數中指定兩個機器人名稱的元組。- "opposed":設置環境,使兩個機器人相對站立,面向彼此。需要在 --robots 參數中指定兩個機器人名稱的元組。--arm:僅適用于 "TwoArm..." 環境。指定要控制的多個臂中的哪一個。其他(被動)臂將保持靜止。選項有 {"right", "left"}(從機器人面向觀眾的方向看)--switch-on-grasp:僅適用于 "TwoArm..." 環境。如果啟用,每次按下抓手輸入時將切換當前控制的臂。--toggle-camera-on-grasp:如果啟用,抓手輸入將切換可用的相機角度。示例:對于普通單臂環境:$ python demo_device_control.py --environment PickPlaceCan --robots Sawyer --controller osc對于雙臂雙臂環境:$ python demo_device_control.py --environment TwoArmLift --robots Baxter --config bimanual --arm left --controller osc對于雙臂多單臂機器人環境:$ python demo_device_control.py --environment TwoArmLift --robots Sawyer Sawyer --config parallel --controller osc2、選擇機器人夾抓
涉及的關鍵點概括
-
整體流程:
-
遍歷所有可用的抓手類型,并通過
gripper_types參數將它們應用到環境中。 -
在每個環境中運行一個隨機策略,模擬抓手的操作。
-
-
主要功能:
-
suite.make:用于創建模擬環境,配置環境參數(如機器人型號、抓手類型、渲染選項等)。 -
動作空間:通過
env.action_spec獲取動作的上下界,并生成隨機動作。 -
渲染:通過
env.render()將模擬動畫顯示在窗口中。 -
幀率限制:通過時間計算確保模擬的幀率保持在指定范圍內,防止運行過于流暢或遲鈍。
-
-
技術細節:
-
robosuite.ALL_GRIPPERS包含了所有可用的抓手類型,程序會逐個測試這些抓手。 -
control_freq=50參數定義了控制頻率,確保模擬的幀率足夠高。 -
done標志用于檢測任務是否完成(例如:物體被成功抬起)。
-
示例代碼
import time
import numpy as np
import robosuite as suite
from robosuite import ALL_GRIPPERSMAX_FR = 25 # 模擬中運行的最大幀率if __name__ == "__main__":for gripper in ALL_GRIPPERS:# 通知用戶正在使用哪種抓手print(f"使用抓手 {gripper}...")# 創建環境并使用選定的抓手類型env = suite.make("Lift",robots="Panda",gripper_types=gripper,has_renderer=True, # 確保我們可以在屏幕上渲染has_offscreen_renderer=False, # 不需要離屏渲染,因為我們沒有使用像素觀察use_camera_obs=False, # 不使用像素觀察control_freq=50, # 控制應該足夠快,這樣模擬看起來會更流暢camera_names="frontview",)# 重置環境env.reset()# 獲取動作范圍low, high = env.action_spec# 運行隨機策略for t in range(300):start = time.time()env.render() # 渲染環境action = np.random.uniform(low, high) # 隨機動作observation, reward, done, info = env.step(action) # 執行動作if done:print("Episode 在 {} 個時間步后結束".format(t + 1))break# 如果需要,限制幀率elapsed = time.time() - startdiff = 1 / MAX_FR - elapsedif diff > 0:time.sleep(diff)# 關閉窗口env.close()3、夾抓控制
-
抓手控制: 抓手可以在設定的高度范圍內移動,并通過開合手指抓取物體。
-
物體交互: 模擬物體與抓手的接觸,監測接觸的物理信息(如摩擦力、法向量等)。
-
地面檢測: 避免物體與地面的重復檢測。
-
視覺呈現: 使用 OpenCV 渲染模擬動畫,展示抓手和物體的交互過程。
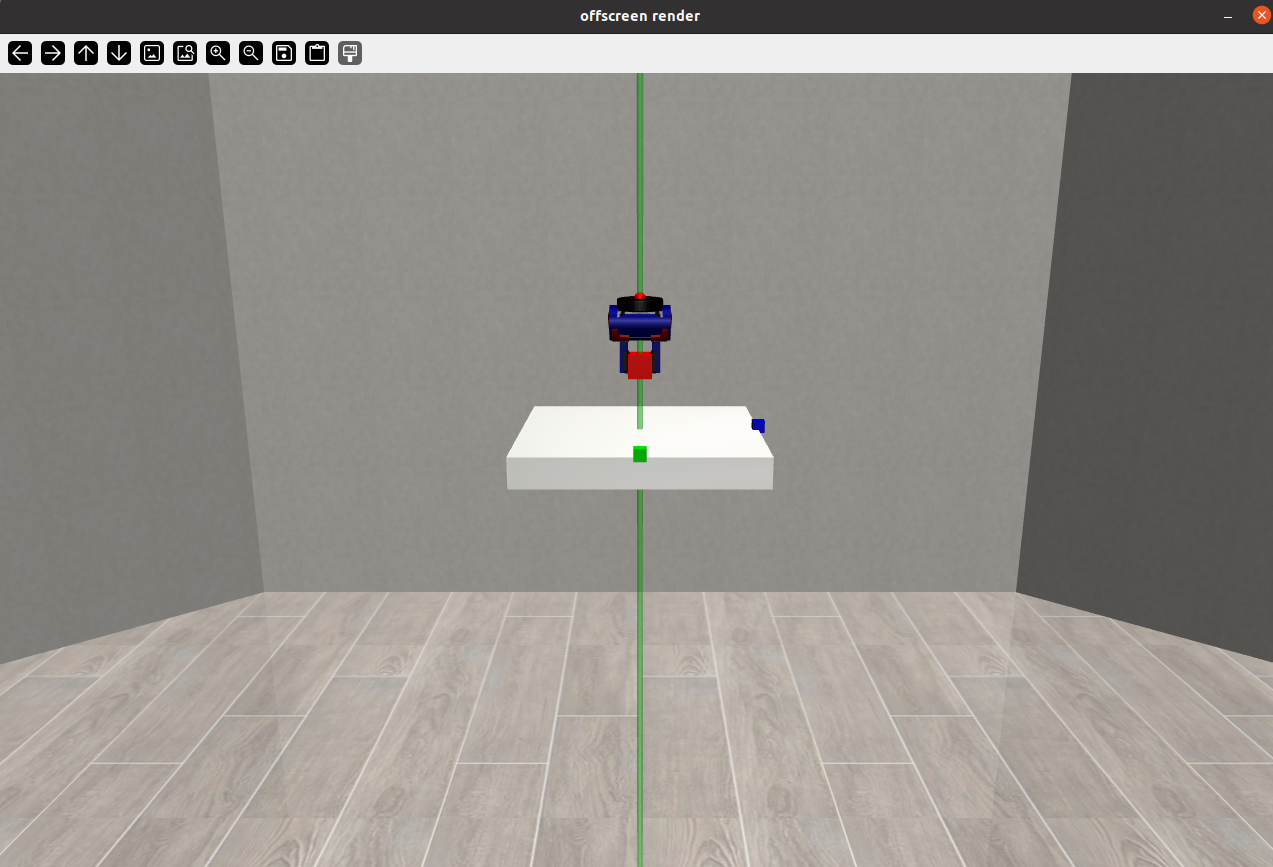
?運行效果:
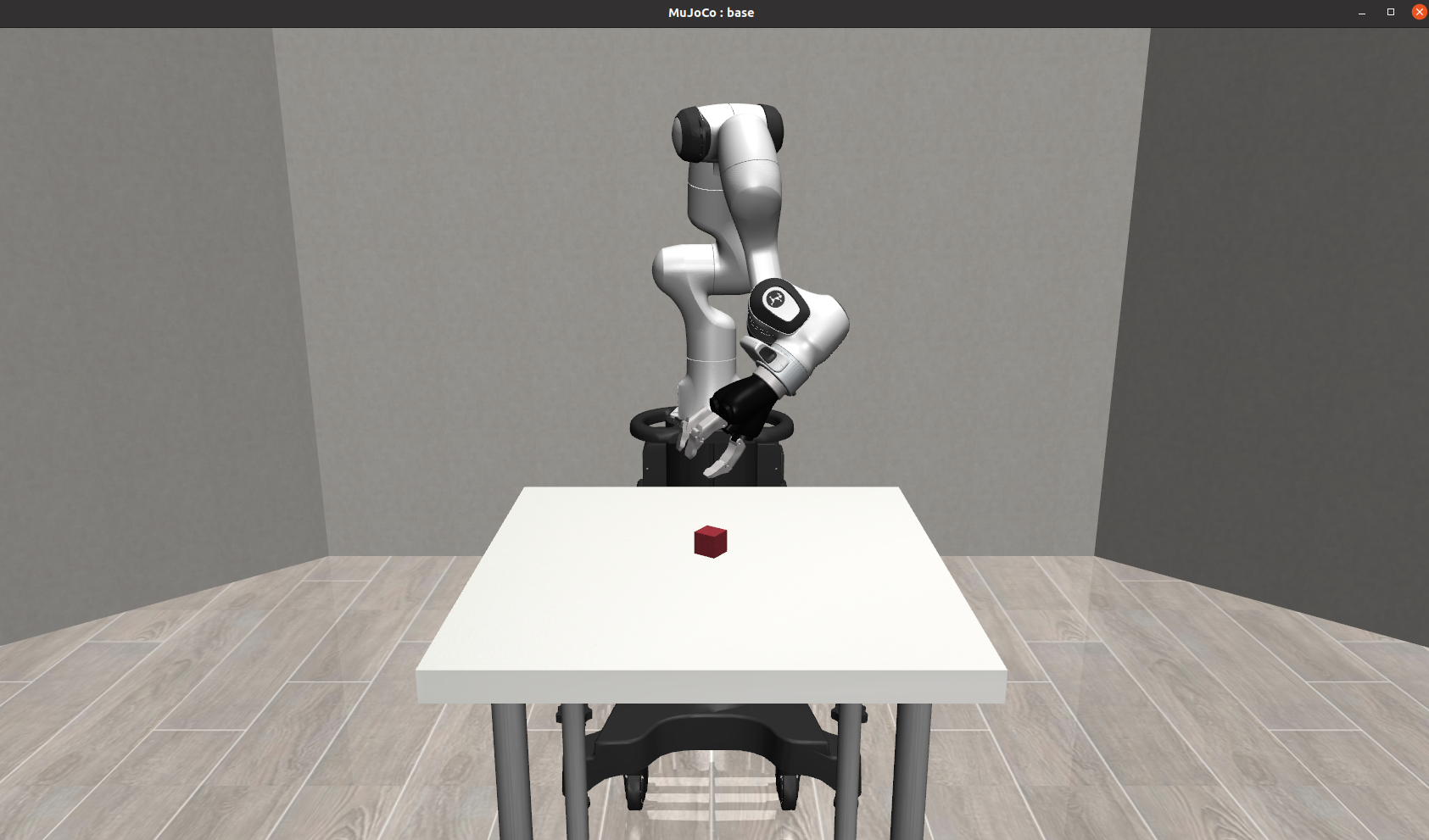
自動切換不同夾抓:
通過上面的演示,最終我們選擇合適抓取當前物體的夾抓~
?
示例代碼:
import xml.etree.ElementTree as ETfrom robosuite.models import MujocoWorldBase
from robosuite.models.arenas.table_arena import TableArena
from robosuite.models.grippers import PandaGripper, RethinkGripper
from robosuite.models.objects import BoxObject
from robosuite.utils import OpenCVRenderer
from robosuite.utils.binding_utils import MjRenderContextOffscreen, MjSim
from robosuite.utils.mjcf_utils import new_actuator, new_jointif __name__ == "__main__":# 創建空的世界world = MujocoWorldBase()# 添加桌子arena = TableArena(table_full_size=(0.4, 0.4, 0.05), table_offset=(0, 0, 1.1), has_legs=False)world.merge(arena)# 添加抓手gripper = RethinkGripper()# 創建一個新的身體,用滑動關節連接抓手gripper_body = ET.Element("body", name="gripper_base")gripper_body.set("pos", "0 0 1.3") # 設置抓手位置gripper_body.set("quat", "0 0 1 0") # 翻轉 z 軸gripper_body.append(new_joint(name="gripper_z_joint", type="slide", axis="0 0 1", damping="50")) # 添加滑動關節# 將抓手基座添加到世界中world.worldbody.append(gripper_body)# 將抓手合并進抓手基座world.merge(gripper, merge_body="gripper_base")# 添加執行器以控制滑動關節world.actuator.append(new_actuator(joint="gripper_z_joint", act_type="position", name="gripper_z", kp="500"))# 添加一個可抓取的物體mujoco_object = BoxObject(name="box", size=[0.02, 0.02, 0.02], rgba=[1, 0, 0, 1], friction=[1, 0.005, 0.0001]).get_obj()# 設置物體位置mujoco_object.set("pos", "0 0 1.11")# 將物體添加到世界world.worldbody.append(mujoco_object)# 添加 x 軸和 y 軸的參考物(視覺輔助)x_ref = BoxObject(name="x_ref", size=[0.01, 0.01, 0.01], rgba=[0, 1, 0, 1], obj_type="visual", joints=None).get_obj()x_ref.set("pos", "0.2 0 1.105")world.worldbody.append(x_ref)y_ref = BoxObject(name="y_ref", size=[0.01, 0.01, 0.01], rgba=[0, 0, 1, 1], obj_type="visual", joints=None).get_obj()y_ref.set("pos", "0 0.2 1.105")world.worldbody.append(y_ref)# 啟動模擬model = world.get_model(mode="mujoco")sim = MjSim(model)viewer = OpenCVRenderer(sim)render_context = MjRenderContextOffscreen(sim, device_id=-1)sim.add_render_context(render_context)sim_state = sim.get_state()# 用于重力補償gravity_corrected = ["gripper_z_joint"]_ref_joint_vel_indexes = [sim.model.get_joint_qvel_addr(x) for x in gravity_corrected]# 設置抓手參數gripper_z_id = sim.model.actuator_name2id("gripper_z")gripper_z_low = 0.07 # 抓手低位置gripper_z_high = -0.02 # 抓手高位置gripper_z_is_low = False # 抓手是否處于低位置gripper_jaw_ids = [sim.model.actuator_name2id(x) for x in gripper.actuators]gripper_open = [-0.0115, 0.0115] # 抓手打開時的關節角度gripper_closed = [0.020833, -0.020833] # 抓手關閉時的關節角度gripper_is_closed = True # 抓手是否關閉# 硬編碼的抓手軌跡序列seq = [(False, False), (True, False), (True, True), (False, True)]sim.set_state(sim_state)step = 0T = 500 # 每隔 T 步循環軌跡序列while True:if step % 100 == 0:print("step: {}".format(step))# 獲取接觸信息for contact in sim.data.contact[0 : sim.data.ncon]:geom_name1 = sim.model.geom_id2name(contact.geom1)geom_name2 = sim.model.geom_id2name(contact.geom2)if geom_name1 == "floor" and geom_name2 == "floor":continueprint("geom1: {}, geom2: {}".format(geom_name1, geom_name2))print("contact id {}".format(id(contact)))print("friction: {}".format(contact.friction))print("normal: {}".format(contact.frame[0:3]))# 循環抓手軌跡序列if step % T == 0:plan = seq[int(step / T) % len(seq)]gripper_z_is_low, gripper_is_closed = planprint("changing plan: gripper low: {}, gripper closed {}".format(gripper_z_is_low, gripper_is_closed))# 控制抓手if gripper_z_is_low:sim.data.ctrl[gripper_z_id] = gripper_z_low # 設置抓手到低位置else:sim.data.ctrl[gripper_z_id] = gripper_z_high # 設置抓手到高位置if gripper_is_closed:sim.data.ctrl[gripper_jaw_ids] = gripper_closed # 關閉抓手else:sim.data.ctrl[gripper_jaw_ids] = gripper_open # 打開抓手# 更新模擬sim.step()sim.data.qfrc_applied[_ref_joint_vel_indexes] = sim.data.qfrc_bias[_ref_joint_vel_indexes]viewer.render() # 渲染模擬動畫step += 1代碼解析:
-
MujocoWorldBase和MujocoSim:-
MujocoWorldBase用于創建一個Mujoco模擬世界的基礎。 -
MujocoSim則是負責運行穆喬科模擬的核心類。
-
-
抓手的添加和控制:
-
使用
RethinkGripper創建抓手模型。 -
通過定義
gripper_z_joint和對應的執行器new_actuator,實現抓手的高度控制。
-
-
物體的添加:
-
使用
BoxObject定義了一個紅色的立方體小物體,用于抓取演示。 -
物體的物理屬性(如摩擦力)通過
friction參數設置。
-
-
視覺輔助: 通過添加綠色和藍色的方塊作為參考,方便觀察物體的位置和方向。
-
模擬控制: 使用
sim.step()更新模擬狀態。使用viewer.render()渲染模擬圖像到窗口。 -
接觸信息: 通過
sim.data.contact獲取接觸信息,可用于調試和分析抓手與物體的交互情況。
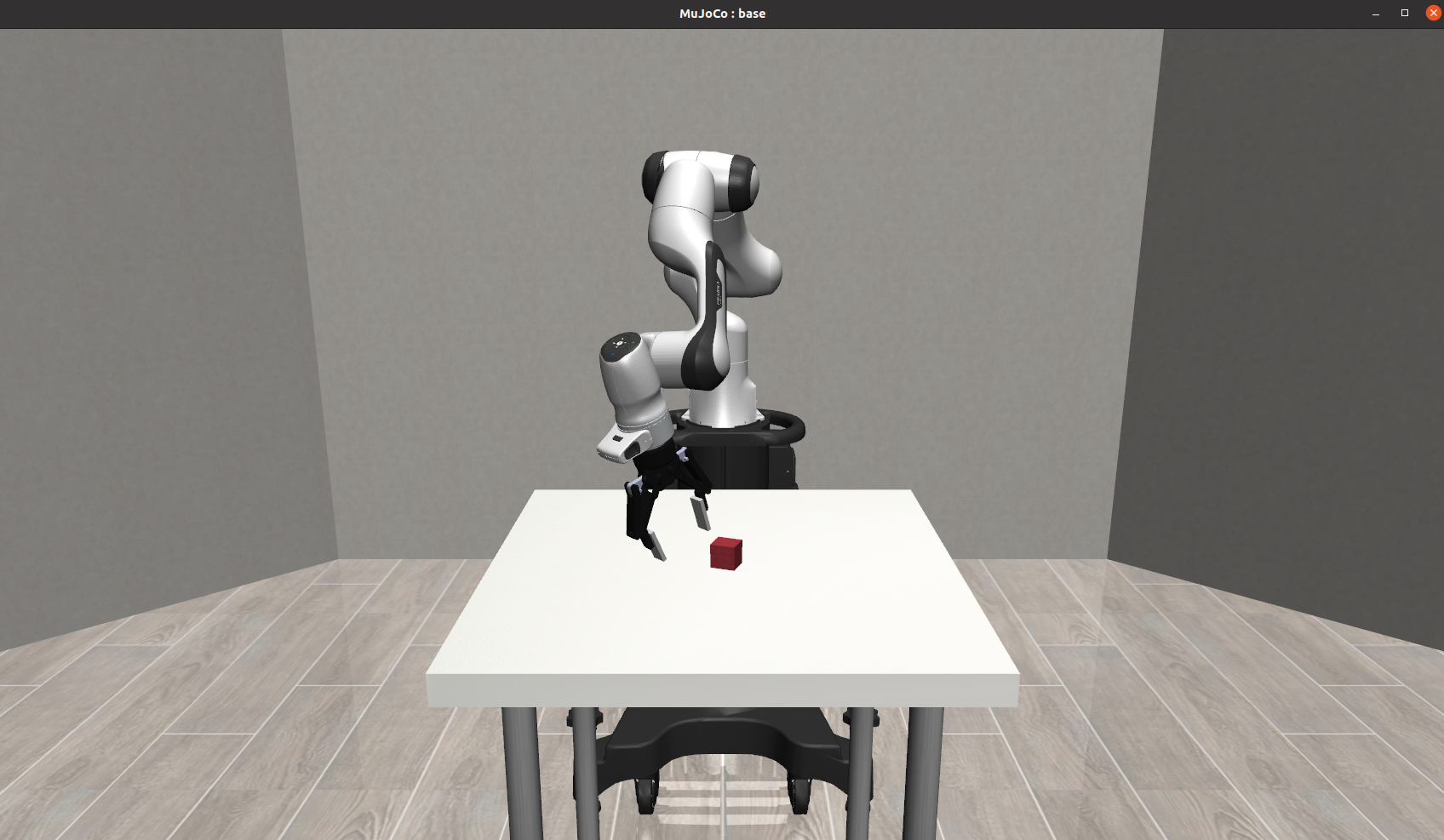
運行效果:
抓起物體:
4、記錄軌跡數據并回放
-
數據收集:通過隨機策略生成軌跡數據并保存。
-
數據回放:從保存的數據中加載軌跡并回放。
-
環境包裝:使用
DataCollectionWrapper包裝環境,支持數據收集功能。 -
實時渲染:在數據收集和回放過程中實時渲染環境動畫。
示例代碼:
import argparse
import os
import time
from glob import globimport numpy as npimport robosuite as suite
from robosuite.wrappers import DataCollectionWrapperdef collect_random_trajectory(env, timesteps=1000, max_fr=None):"""運行隨機策略以收集軌跡數據。軌跡數據以 npz 格式保存到文件中。修改 DataCollectionWrapper 包裝器以添加新字段或更改數據格式。參數:env (MujocoEnv): 用于收集軌跡的環境實例timesteps (int): 每個軌跡運行的環境時間步數max_fr (int): 如果指定,當模擬運行速度超過最大幀率時暫停"""env.reset() # 重置環境dof = env.action_dim # 獲取動作維度for t in range(timesteps):start = time.time()action = np.random.randn(dof) # 生成隨機動作env.step(action) # 執行動作env.render() # 渲染環境if t % 100 == 0:print(t) # 每 100 步打印一次進度# 如果指定了最大幀率,則限制幀率if max_fr is not None:elapsed = time.time() - startdiff = 1 / max_fr - elapsedif diff > 0:time.sleep(diff)def playback_trajectory(env, ep_dir, max_fr=None):"""回放某一集的數據。參數:env (MujocoEnv): 用于回放軌跡的環境實例ep_dir (str): 包含某一集數據的目錄路徑"""# 從 XML 文件重新加載模型xml_path = os.path.join(ep_dir, "model.xml")with open(xml_path, "r") as f:env.reset_from_xml_string(f.read()) # 從 XML 字符串重置環境state_paths = os.path.join(ep_dir, "state_*.npz") # 獲取狀態文件路徑# 逐個加載狀態文件并回放t = 0for state_file in sorted(glob(state_paths)):print(state_file)dic = np.load(state_file) # 加載狀態文件states = dic["states"] # 獲取狀態數據for state in states:start = time.time()env.sim.set_state_from_flattened(state) # 設置模擬狀態env.sim.forward() # 更新模擬env.viewer.update() # 更新視圖env.render() # 渲染環境t += 1if t % 100 == 0:print(t) # 每 100 步打印一次進度# 如果指定了最大幀率,則限制幀率if max_fr is not None:elapsed = time.time() - startdiff = 1 / max_fr - elapsedif diff > 0:time.sleep(diff)env.close() # 關閉環境if __name__ == "__main__":parser = argparse.ArgumentParser()parser.add_argument("--environment", type=str, default="Door") # 環境名稱parser.add_argument("--robots", nargs="+", type=str, default="Panda", help="使用的機器人") # 機器人名稱parser.add_argument("--directory", type=str, default="/tmp/") # 數據保存目錄parser.add_argument("--timesteps", type=int, default=1000) # 時間步數parser.add_argument("--max_fr",default=20,type=int,help="當模擬運行速度超過指定幀率時暫停;20 fps 為實時。",) # 最大幀率args = parser.parse_args()# 創建原始環境env = suite.make(args.environment,robots=args.robots,ignore_done=True,use_camera_obs=False,has_renderer=True,has_offscreen_renderer=False,control_freq=20,)data_directory = args.directory # 數據保存目錄# 使用數據收集包裝器包裝環境env = DataCollectionWrapper(env, data_directory)# 測試多次調用 env.reset 是否會創建多個目錄env.reset()env.reset()env.reset()# 收集一些數據print("正在收集隨機數據...")collect_random_trajectory(env, timesteps=args.timesteps, max_fr=args.max_fr)# 回放數據_ = input("按下任意鍵開始回放...")print("正在回放數據...")data_directory = env.ep_directory # 獲取當前集的目錄playback_trajectory(env, data_directory, args.max_fr)代碼分析:
-
DataCollectionWrapper包裝器:用于包裝環境,以便在運行過程中收集數據。收集的數據以npz格式保存到指定目錄中。 -
數據收集:使用隨機策略生成動作,運行環境并收集軌跡數據。數據包括環境狀態、動作、觀察值等。
-
數據回放:從保存的數據中加載狀態,并逐幀回放。通過
env.sim.set_state_from_flattened(state)設置模擬狀態。 -
幀率控制:如果指定了最大幀率 (
max_fr),則通過time.sleep控制模擬速度,避免運行過快。 -
數據保存和加載:數據保存在指定目錄中,包括 XML 模型文件和狀態文件。回放時從這些文件中加載數據并恢復環境狀態。
運行效果:
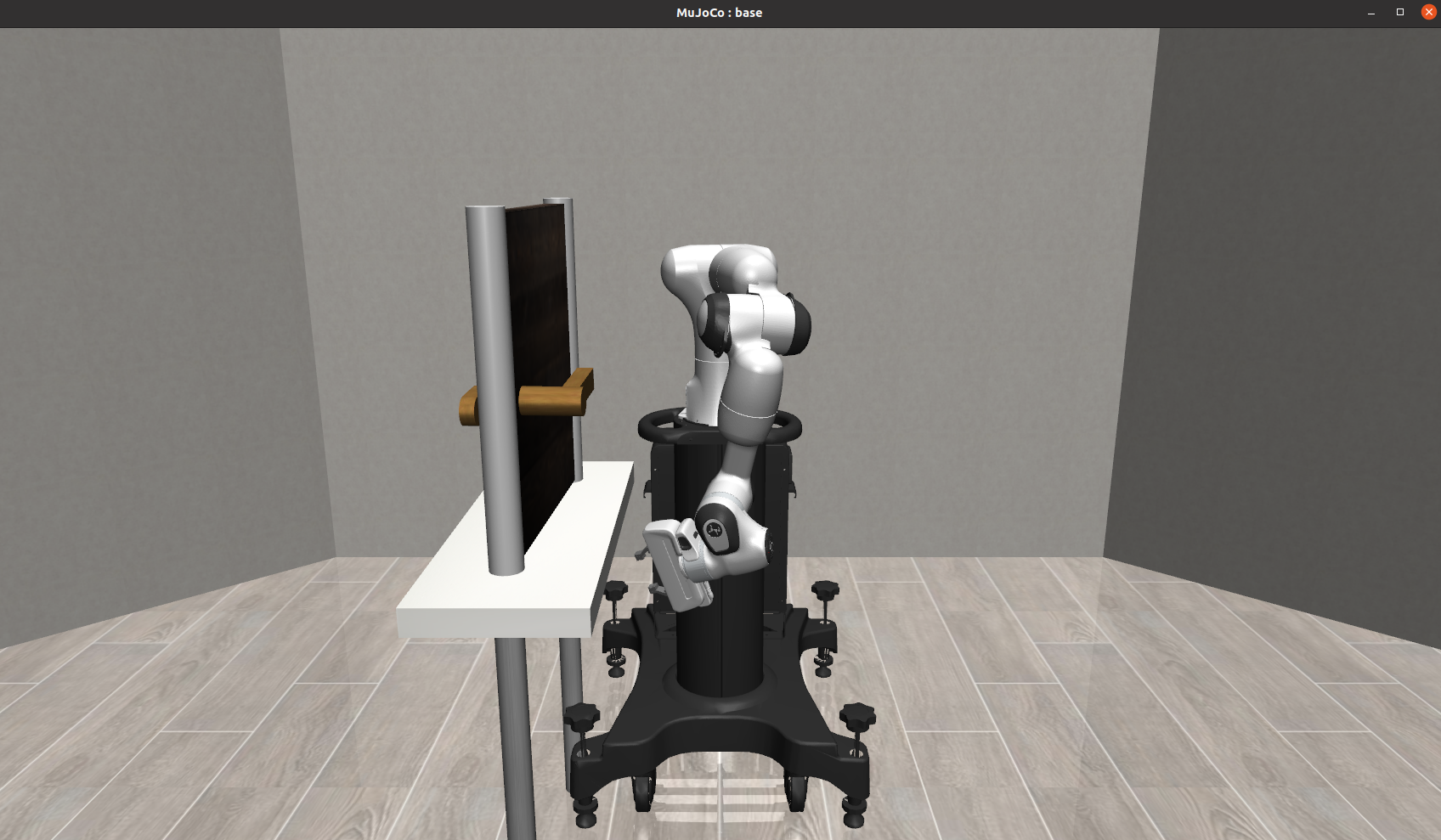
打印信息:
DataCollectionWrapper: making folder at /tmp/ep_1740881381_0772326
0
100
200
300
400
500
600
700
800
900
按下任意鍵開始回放...
正在回放數據...
/tmp/ep_1740881381_0772326/state_1740881386_010901.npz
100
/tmp/ep_1740881381_0772326/state_1740881391_0270681.npz
200
/tmp/ep_1740881381_0772326/state_1740881396_0425832.npz
300
/tmp/ep_1740881381_0772326/state_1740881401_0576134.npz
400
/tmp/ep_1740881381_0772326/state_1740881406_0732286.npz
500
/tmp/ep_1740881381_0772326/state_1740881411_0889266.npz
600
/tmp/ep_1740881381_0772326/state_1740881416_1048322.npz
700
/tmp/ep_1740881381_0772326/state_1740881421_1204755.npz
800
/tmp/ep_1740881381_0772326/state_1740881426_135585.npz
900
/tmp/ep_1740881381_0772326/state_1740881431_1502776.npz
1000
Xlib: ?extension "NV-GLX" missing on display ":1".5、多種機器人任務執行
-
環境自定義:支持選擇不同的環境和機器人組合,適應多種模擬場景。
-
領域隨機化:通過隨機化環境參數,提高機器人在不同條件下的適應能力。
-
可視化:實時渲染模擬過程,方便觀察機器人的行為和環境交互。
示例代碼:
# 導入移動機器人模塊
from robosuite.robots import MobileRobot# 導入 RoboSuite 的輸入工具
from robosuite.utils.input_utils import *
import time# 定義最大幀率,用于控制模擬的運行速度
MAX_FR = 25# 主程序入口
if __name__ == "__main__":options = {} # 保存創建環境的選項# 歡迎信息print("歡迎使用 RoboSuite v{}!".format(suite.__version__))print(suite.__logo__) # 打印 RoboSuite 的標志# 用戶選擇環境options["env_name"] = choose_environment()# 如果是多臂環境,默認選擇機器人if "TwoArm" in options["env_name"]:options["env_configuration"] = choose_multi_arm_config()if options["env_configuration"] == "single-robot":options["robots"] = choose_robots(exclude_bimanual=False, # 不排除雙臂機器人use_humanoids=True, # 允許使用人形機器人exclude_single_arm=True # 排除單臂機器人)else:options["robots"] = []# 循環選擇兩個機器人for i in range(2):print("請選擇機器人 {}...\n".format(i + 1))options["robots"].append(choose_robots(exclude_bimanual=False, use_humanoids=True))# 如果是人形機器人環境,選擇人形機器人elif "Humanoid" in options["env_name"]:options["robots"] = choose_robots(use_humanoids=True)else:options["robots"] = choose_robots(exclude_bimanual=False, # 不排除雙臂機器人use_humanoids=True # 允許使用人形機器人)# 初始化環境env = suite.make(**options, # 使用用戶選擇的選項has_renderer=True, # 啟用視覺渲染has_offscreen_renderer=False, # 不啟用離屏渲染ignore_done=True, # 忽略任務完成信號use_camera_obs=False, # 不使用相機觀測control_freq=20, # 控制頻率為 20Hz)env.reset() # 重置環境env.viewer.set_camera(camera_id=0) # 設置攝像頭# 禁用移動機器人的腿部和底座控制for robot in env.robots:if isinstance(robot, MobileRobot):robot.enable_parts(legs=False, base=False)# 開始渲染環境for i in range(10000):start = time.time() # 記錄當前時間# 隨機生成動作并執行action = np.random.randn(*env.action_spec[0].shape)obs, reward, done, _ = env.step(action)env.render() # 渲染環境# 控制幀率elapsed = time.time() - startdiff = 1 / MAX_FR - elapsedif diff > 0:time.sleep(diff) # 確保幀率在限制范圍內運行代碼后,首先選擇“環境”,也就是執行任務的種類
Here is a list of environments in the suite:
[0] Door
[1] Lift
[2] NutAssembly
[3] NutAssemblyRound
[4] NutAssemblySingle
[5] NutAssemblySquare
[6] PickPlace
[7] PickPlaceBread
[8] PickPlaceCan
[9] PickPlaceCereal
[10] PickPlaceMilk
[11] PickPlaceSingle
[12] Stack
[13] ToolHang
[14] TwoArmHandover
[15] TwoArmLift
[16] TwoArmPegInHole
[17] TwoArmTransport
[18] WipeChoose an environment to run (enter a number from 0 to 18):
然后選擇執行的機器人類型
Here is a list of available robots:
[0] Baxter
[1] GR1ArmsOnly
[2] IIWA
[3] Jaco
[4] Kinova3
[5] Panda
[6] Sawyer
[7] SpotWithArmFloating
[8] Tiago
[9] UR5eChoose a robot (enter a number from 0 to 9):?
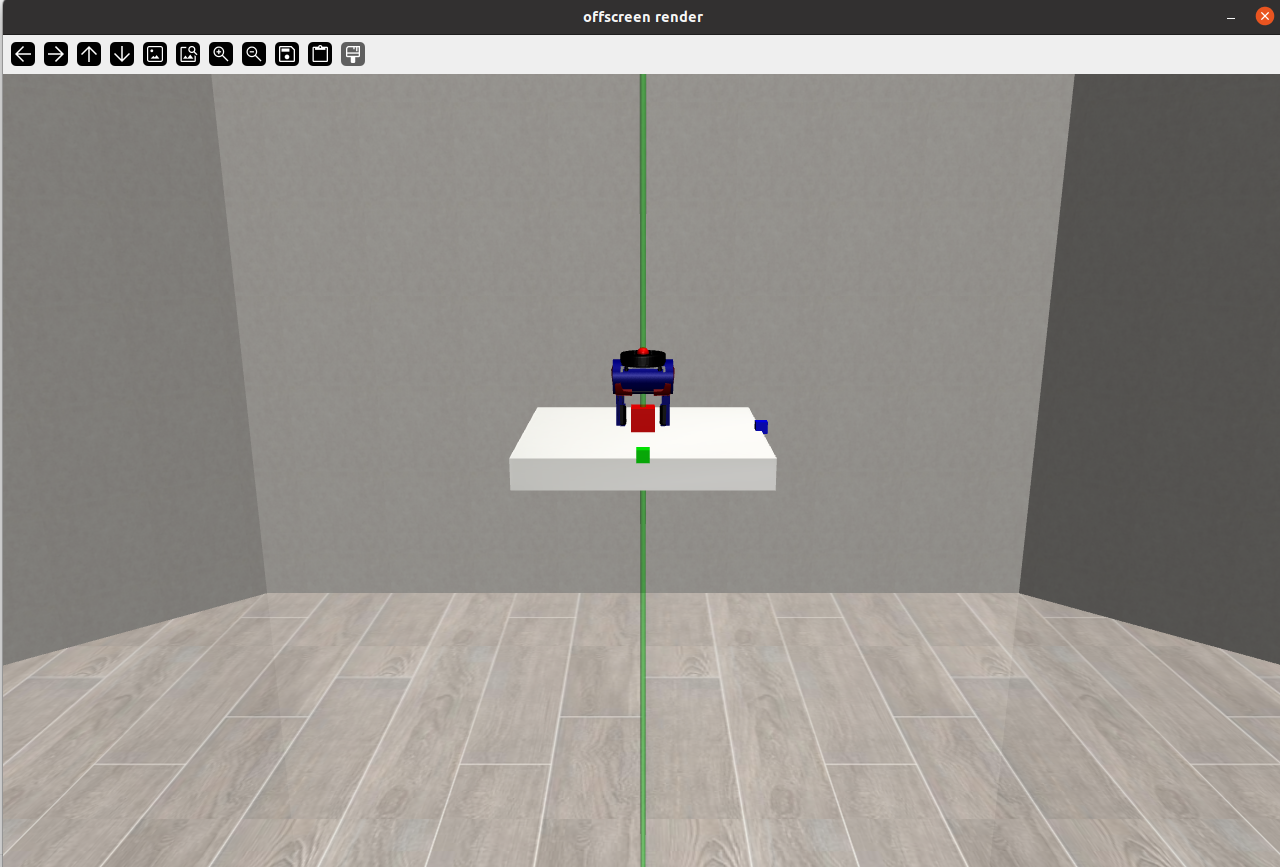
運行效果,第二個機器人選擇7(SpotWithArmFloating)

相關文章推薦:
機器人學習模擬框架 robosuite 支持強化學習和模仿學習 (1) 快速入門_機械臂模仿學習入門-CSDN博客
機器人學習模擬框架 robosuite (2)支持多種機器人、夾抓和底座 工作流程-CSDN博客
?分享完成~








(重要))
)




![遞歸遍歷目錄 和 普通文件的復制 [Java EE]](http://pic.xiahunao.cn/遞歸遍歷目錄 和 普通文件的復制 [Java EE])


)

![30.[前端開發-JavaScript基礎]Day07-數組Array-高階函數-日期Date-DOM](http://pic.xiahunao.cn/30.[前端開發-JavaScript基礎]Day07-數組Array-高階函數-日期Date-DOM)