- 僅使用【障礙物點云配準算法】,很容易導致在一條長通道中,因為前后兩幀的雷達點云圖過于相似,導致特征匹配一直完全重合,使得機器人建圖一直停留在原地,但實體機器人早就沿著通道跑向遠端了;
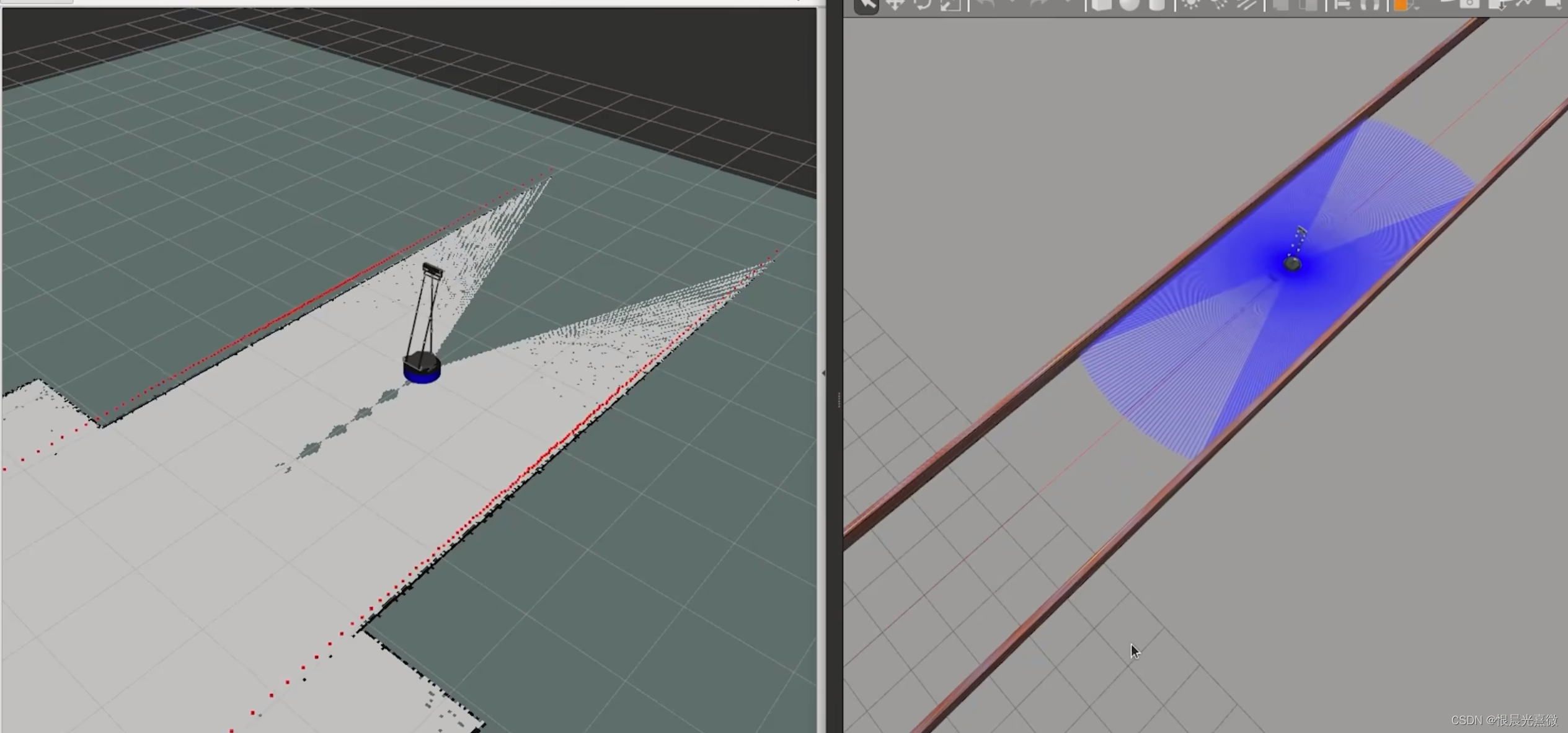
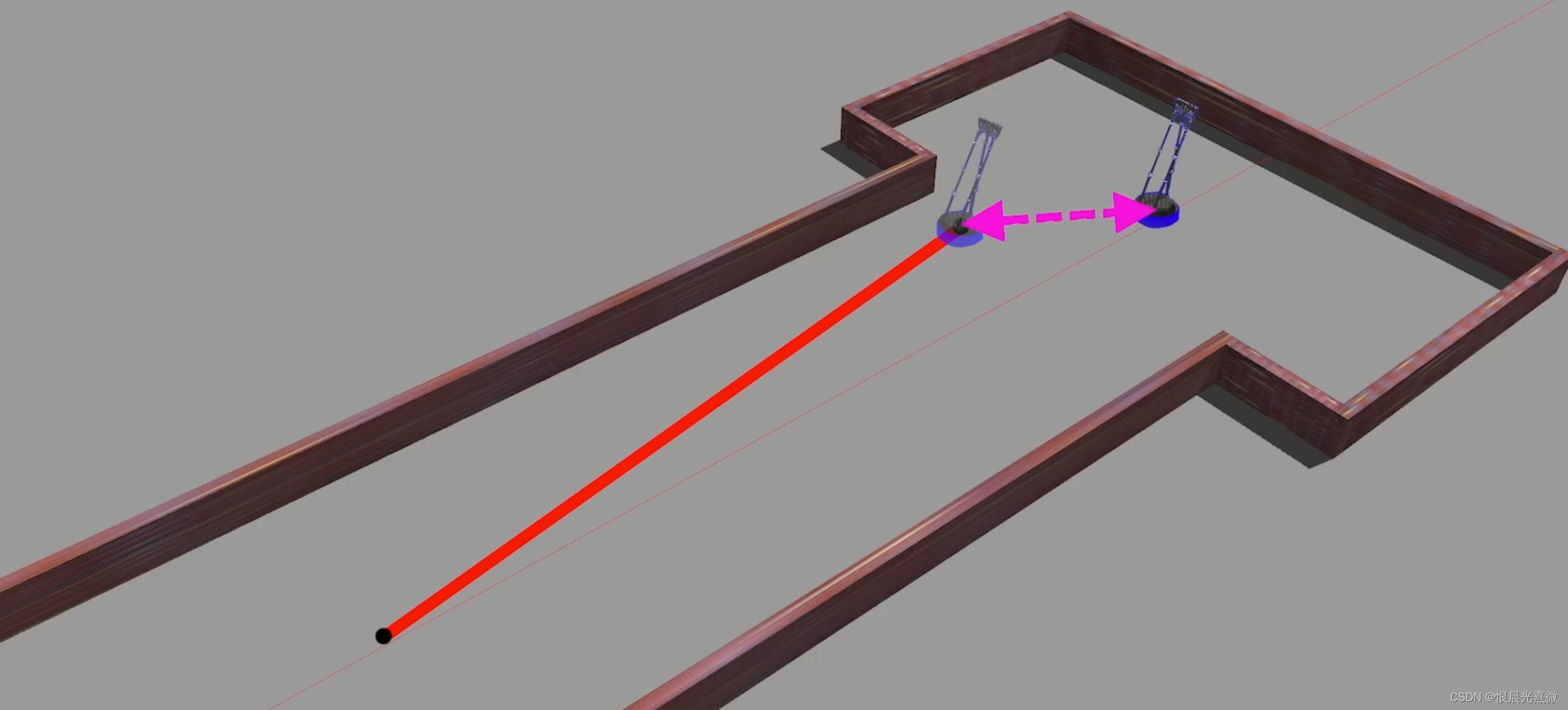
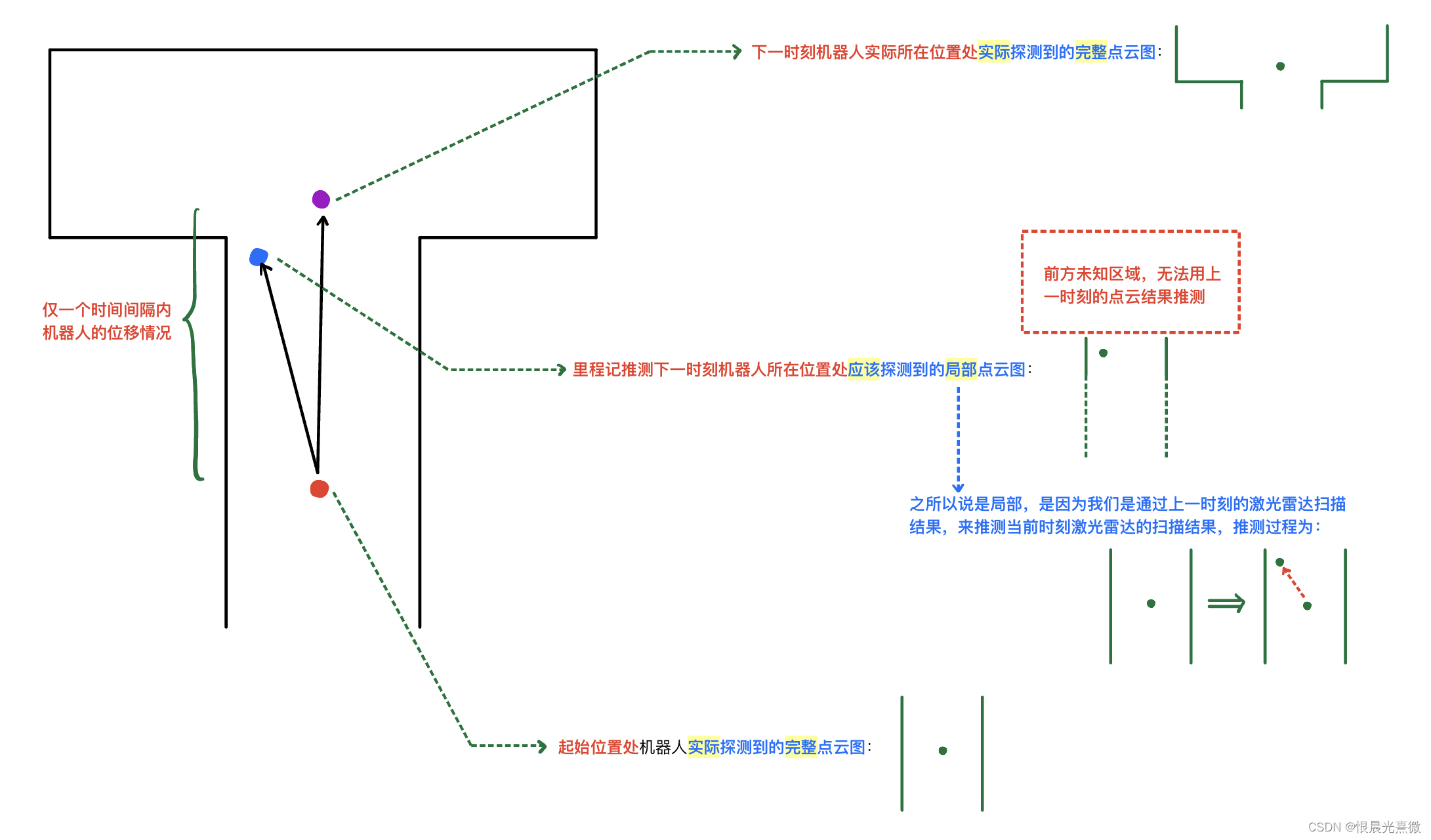
- 僅使用【里程計估算算法】,雖然可以避免上面的問題,即機器人建圖一直停在原地,但是機器人的輪子在轉動過程中難免會打滑,這就導致僅使用里程計估算會導致預測機器人下一時刻將要到達的位置和機器人下一時刻實際到達的位置之間存在誤差;
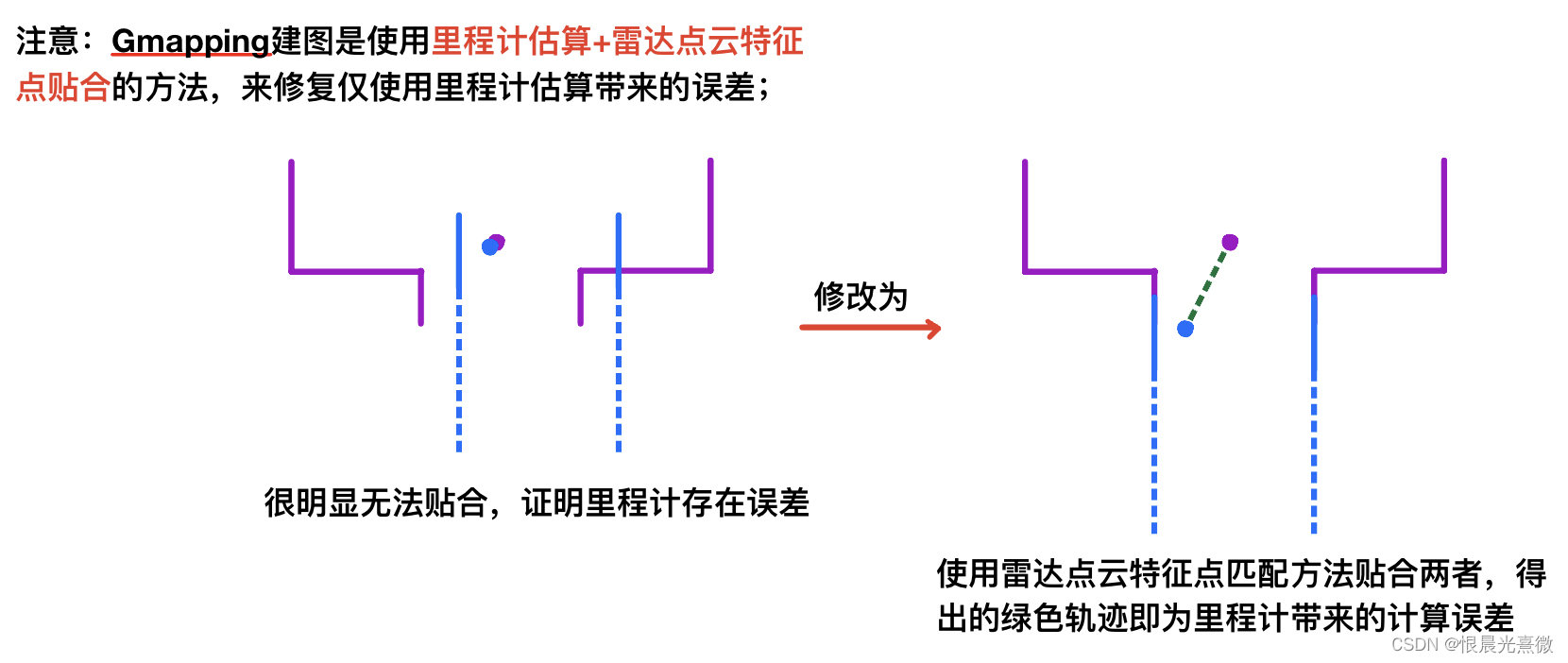
- 最好的辦法是兩種方法結合起來使用:(使用Gmapping軟件包進行定位和建圖)
本文來自互聯網用戶投稿,該文觀點僅代表作者本人,不代表本站立場。本站僅提供信息存儲空間服務,不擁有所有權,不承擔相關法律責任。 如若轉載,請注明出處:http://www.pswp.cn/news/719428.shtml 繁體地址,請注明出處:http://hk.pswp.cn/news/719428.shtml 英文地址,請注明出處:http://en.pswp.cn/news/719428.shtml
如若內容造成侵權/違法違規/事實不符,請聯系多彩編程網進行投訴反饋email:809451989@qq.com,一經查實,立即刪除!2024.03.02:UCOSIII第四節:創建任務)
)



)







】雙向循環帶頭鏈表的增刪查改詳解(天才設計的鏈表結構,應用簡單逆天!!!!!))





