近期,閱讀了FAST-LIO、FAST-LIO2以及Faster_LIO論文,這三篇論文都屬于濾波器的SLAM算法,下面記錄一下三個工作的主要貢獻和不同。
FAST-LIO?
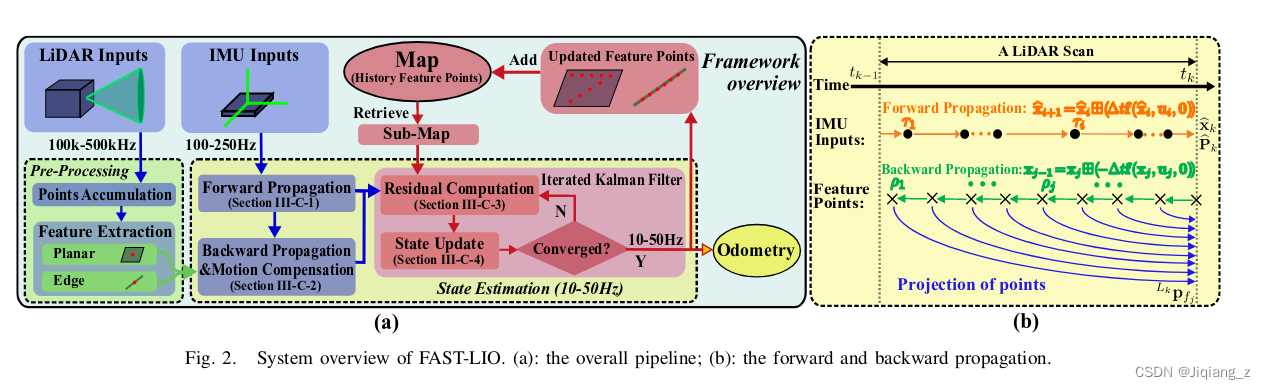
1.提出了一種計算效率高、魯棒性強的激光雷達-慣性里程測量框架。使用緊密耦合的迭代擴展卡爾曼濾波器將激光雷達特征點與 IMU 數據融合,從而在快速運動、噪聲或雜亂環境中實現穩健導航。
2.為了降低大量測量時的計算負荷,提出了一種計算卡爾曼增益的新公式。新公式的計算負荷取決于狀態維度而非測量維度。
FAST-LIO2
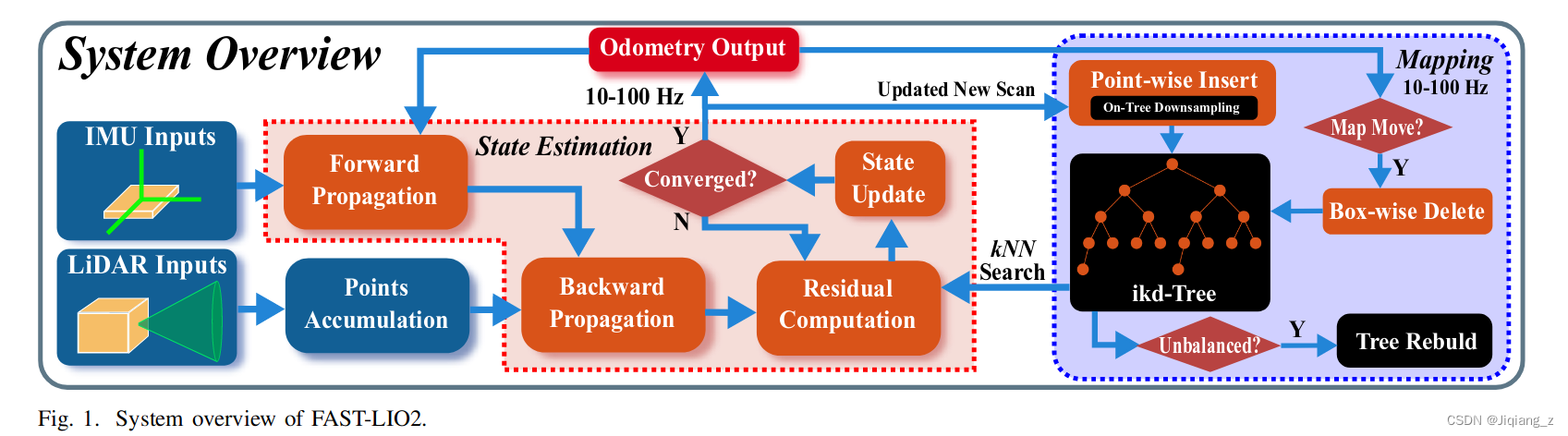
基于FAST-LIO,FAST-LIO2主要有兩點貢獻:
1.第一項是直接將原始點注冊到地圖上(隨后更新地圖,即制圖),用而無需提取特征。這樣可以利環境中的細微特征,從而提高精度。
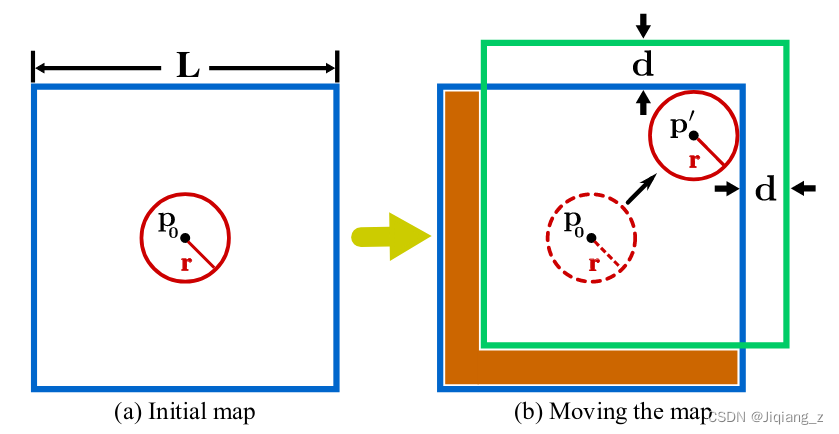
2.第二個主要創新點是通過增量 k-d 樹數據結構(ikd-Tree)來維護地圖,從而實現增量更新(即點插入、刪除)和動態再平衡。
?點云配準的方式如下:

地圖更新的方式如下(局部地圖):
?
Faster_LIO
為了實現高跟蹤速度,Faster_LIO既沒有使用復雜的基于樹的結構來劃分空間點云,也沒有使用嚴格的k最近鄰(k-NN)查詢來計算點匹配。取而代之的是,使用增量體素 (iVox) 作為點云空間數據結構,它從傳統體素修改而來,支持增量插入和并行近似 k-NN 查詢。我們提出線性 iVox 和 PHC(偽希爾伯特曲線)iVox 作為我們算法中的兩個替代底層結構。?
Faster_LIO相比于FAST-LIO2的區別是提出了一種新的點云數據結構。
)



 | YOLOv9)




方法學習)









