一、準備工作
有關OLED屏初始化的問題,詳見【STM32+HAL】OLED顯示初始化配置
二、所用工具
1、芯片:STM32F10C8T6
2、CUBEMX配置軟件
3、?6 軸運動處理組件MPU6050
三、實現功能
OLED屏顯示姿態角
四、HAL配置步驟
1、開啟I2C1進行MPU6050通信

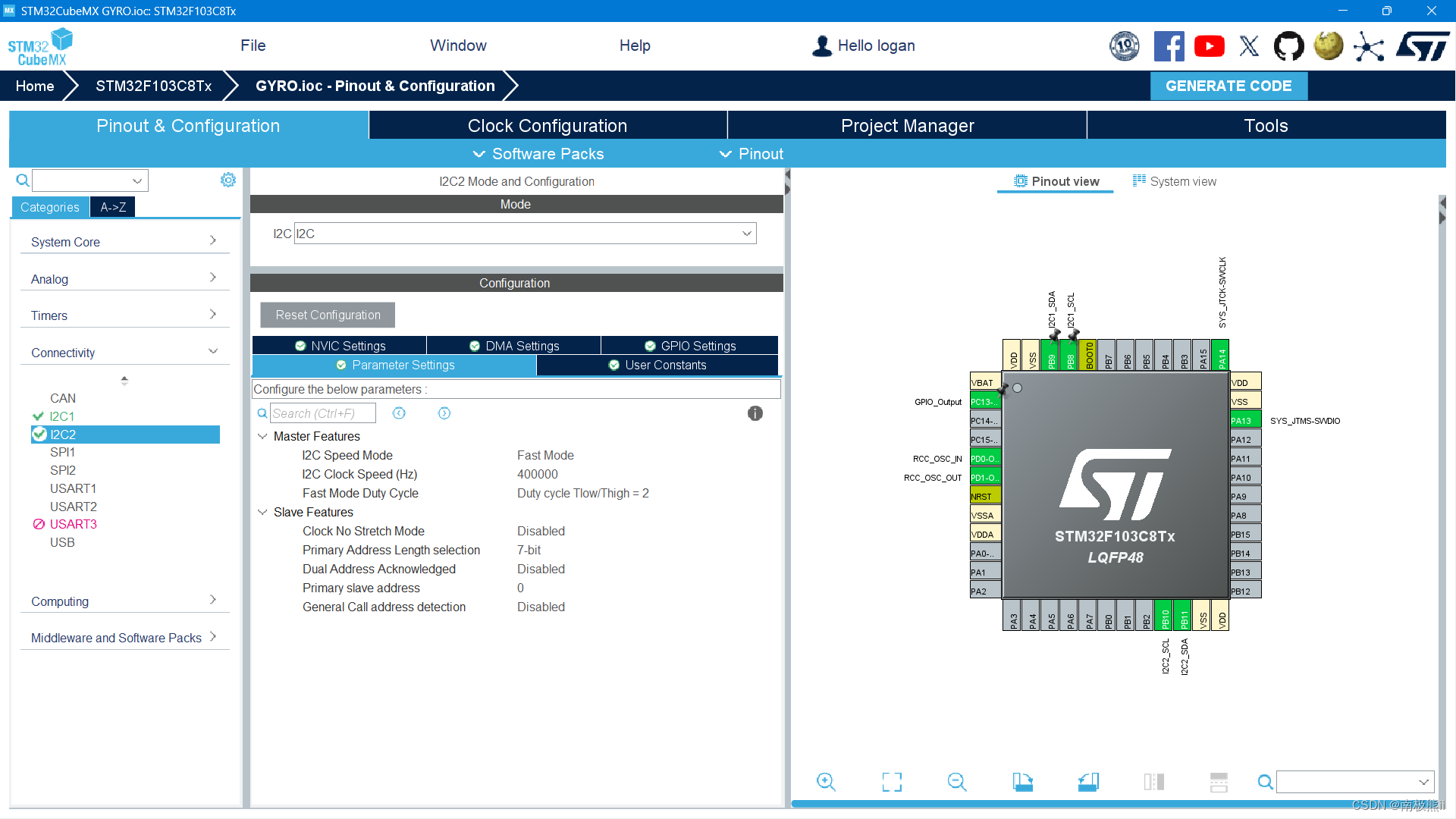
2、開啟I2C2進行OLED屏配置
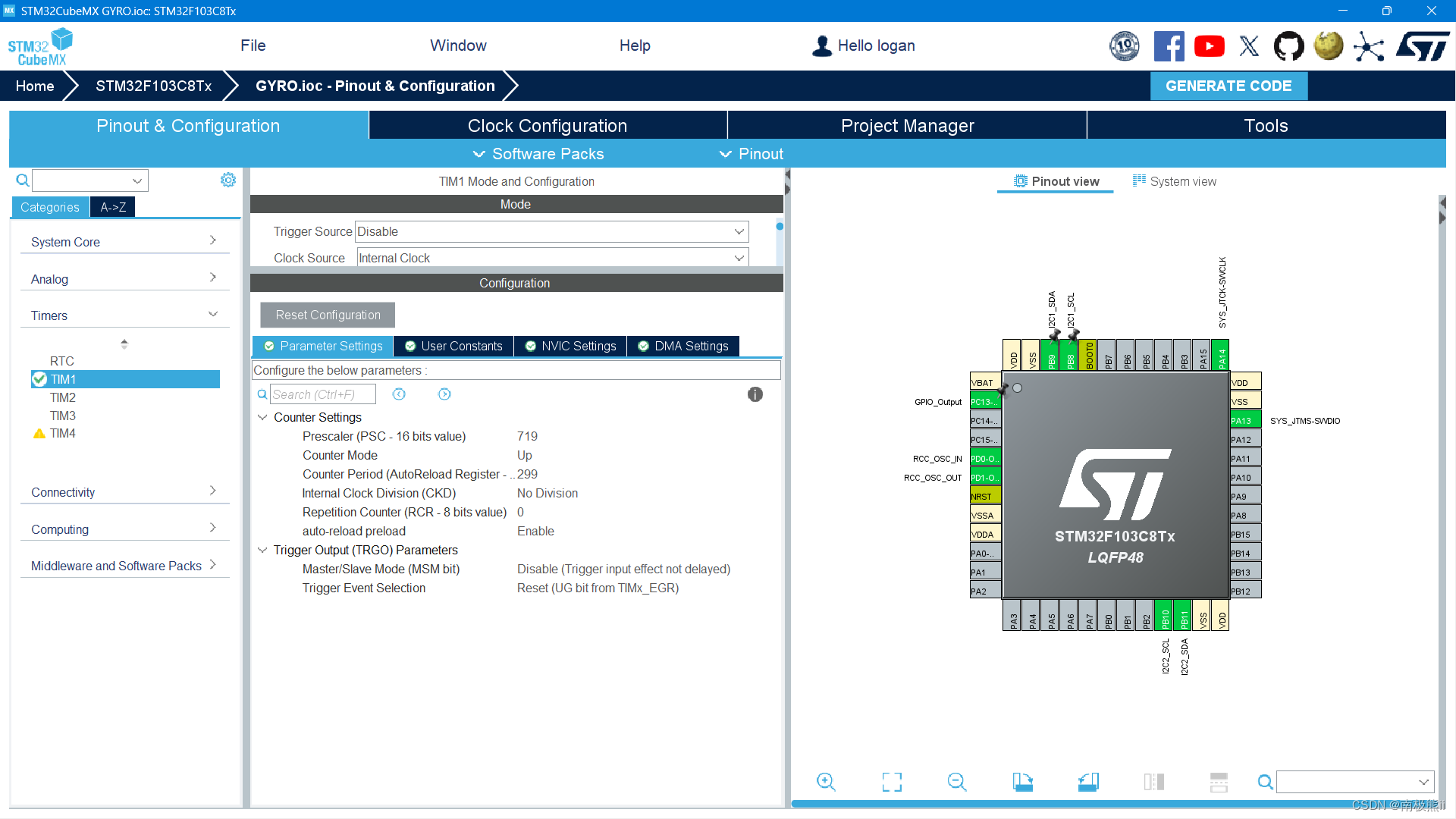
3、開啟定時器1
至此,CUBEMX配置完成
五、巨人之肩
實際原理與代碼講解見:
基于STM32的四旋翼無人機項目(二):MPU6050姿態解算(含上位機3D姿態顯示教學)
【記錄】自己動手使用HAL庫對MPU6050進行編程
六、源碼提供
【STM32+HAL】姿態傳感器陀螺儀MPU6050模塊
:界面設計全面掃盲,得供應鏈者得天下)






SpringCloud系列——openfeign的高級特性實戰內容介紹)







)



