一、IMU傳感器是什么:
- 慣性測量單元IMU(Inertial Measurement Unit)是一種使用【加速度計】和【陀螺儀】來測量【物體三軸姿態角(空間姿態)】的裝置;
- IMU在坐標系的每個坐標軸上,均安裝有1個陀螺儀和1個加速度計(總計3個陀螺儀和3個加速度計),其中陀螺儀用來測量該軸上的角速度,加速度計用來測量該軸上的線性加速度;
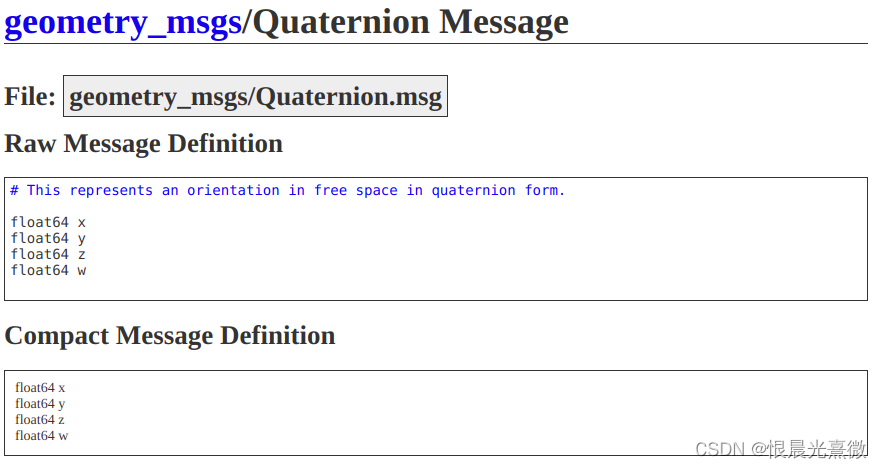
- 測量出來這6個值并不是最終的目的,IMU的目的是獲得當前時刻下機器人的姿態信息xyzw(一共有4個數,分別是偏航角/俯仰角/橫滾角/w值)(之所以多加了一個w值來描述機器人的姿態,是因為如果只是用歐拉角描述--即xyz描述,在某些姿態下會產生一種叫做萬向鎖的問題,因此一位數學家發明了一種叫做Quaternion的方法,即使用xyzw四個值描述機器人姿態的方法);
- 通過3個陀螺儀測量得到的3個角速度值,計算得到機器人姿態;通過3個加速度計測量得到3個線性加速度值,計算得到機器人姿態;然后將兩個姿態對比融合,得到真正的姿態;
參考文章:
什么是IMU? - 古月居
通俗易懂的IMU講解,這一篇就夠了-CSDN博客
二、IMU傳感器輸出的數據信息
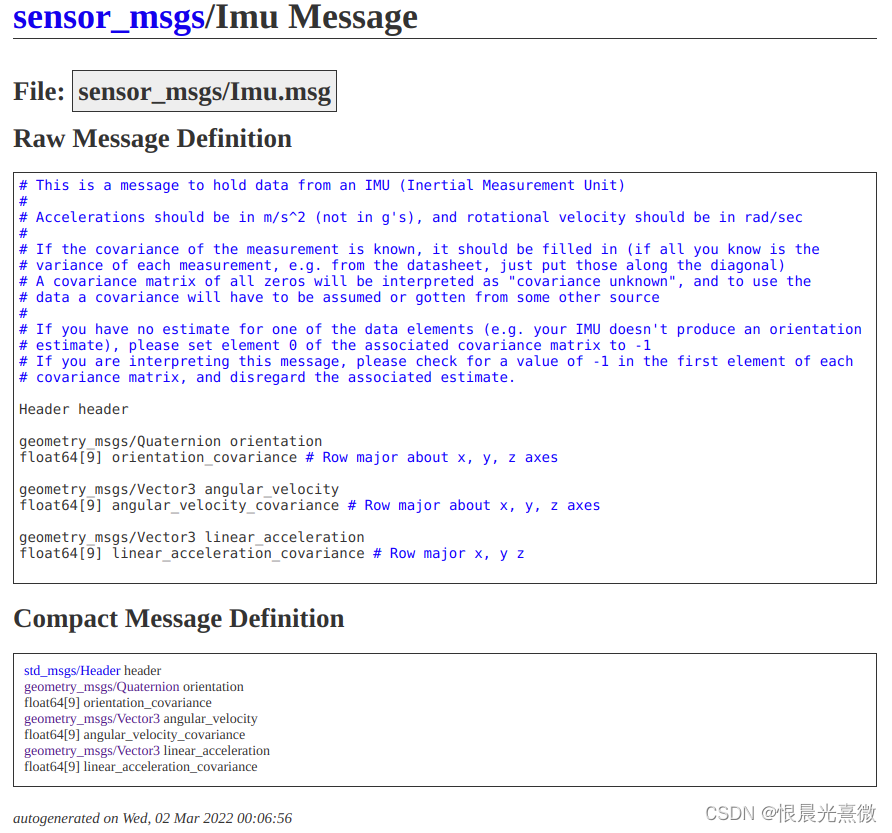

- 角速度:angular_velocity
- 線性加速度:linear_acceleration
- 融合姿態:orientation
三、如何使用陀螺儀/加速度計計算機器人姿態
歐拉角說明:歐拉角說明 - 簡書
加速度計解算姿態:加速度計解算姿態角_三軸加速度計算姿態角-CSDN博客
陀螺儀解算姿態 + 姿態融合:MPU6050姿態解算2-歐拉角&旋轉矩陣-CSDN博客
)











)






