目錄
一、通用定時器輸入捕獲概述
二、常用寄存器和庫函數配置
三、輸入捕獲實驗講解
一、通用定時器輸入捕獲概述
STM32輸入捕獲工作過程(通道1為例)
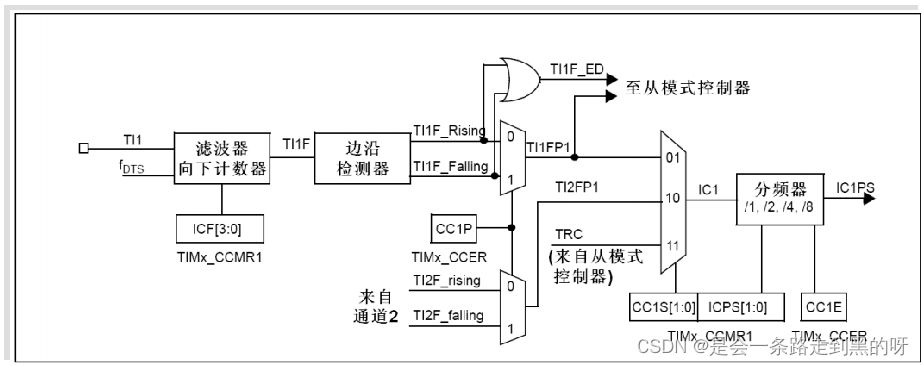
一句話總結工作過程:
通過檢測TIMx_CHx上的邊沿信號,在邊沿信號發生跳變(比如上升沿/下降沿)的時候,將當前定時器的值(TIMx_CNT)存放到對應的捕獲/比較寄存器(TIMx_CCRX)里面,完成一次捕獲。
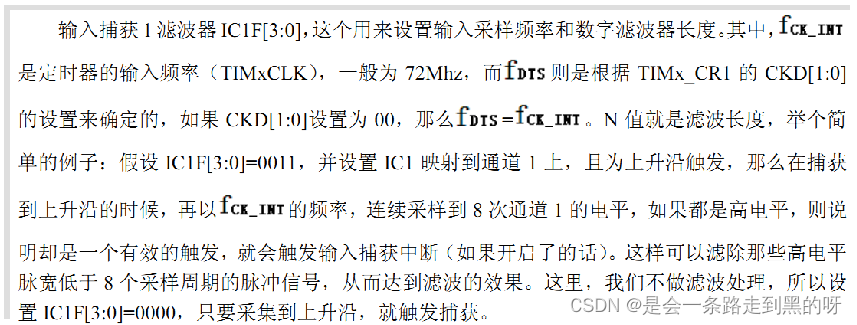
?步驟1:設置輸入捕獲濾波器(通道1為例)
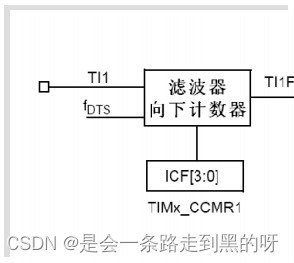
?
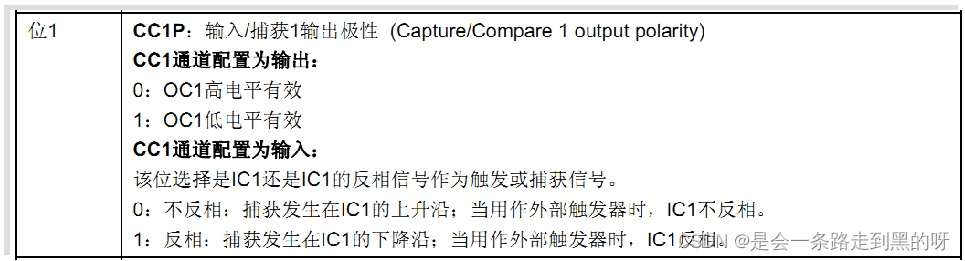
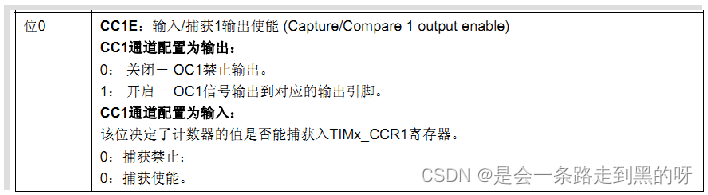
?步驟2:設置輸入捕獲極性(通道1為例)
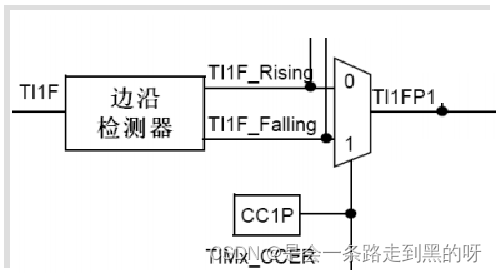
?
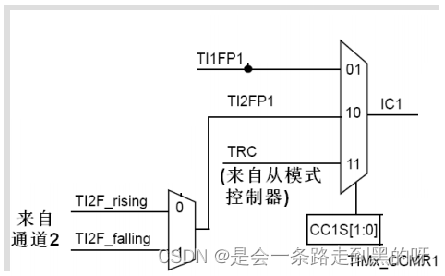
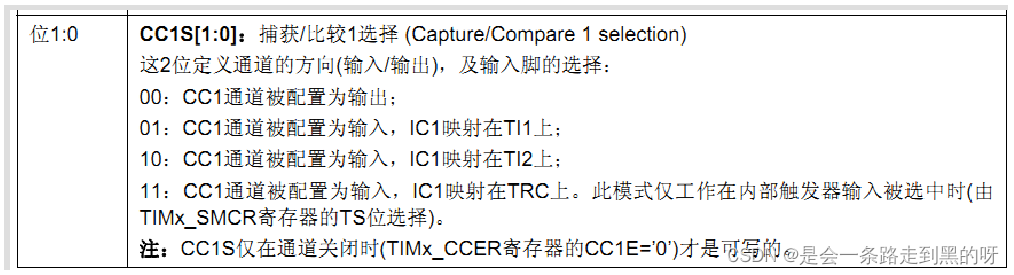
?步驟3:設置輸入捕獲映射通道(通道1為例)
?
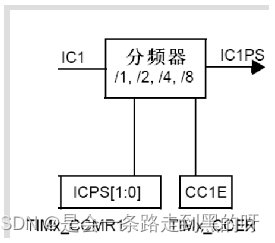
?步驟4:設置輸入捕獲分頻器(通道1為例)
?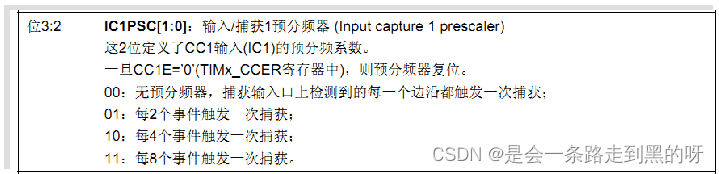
?
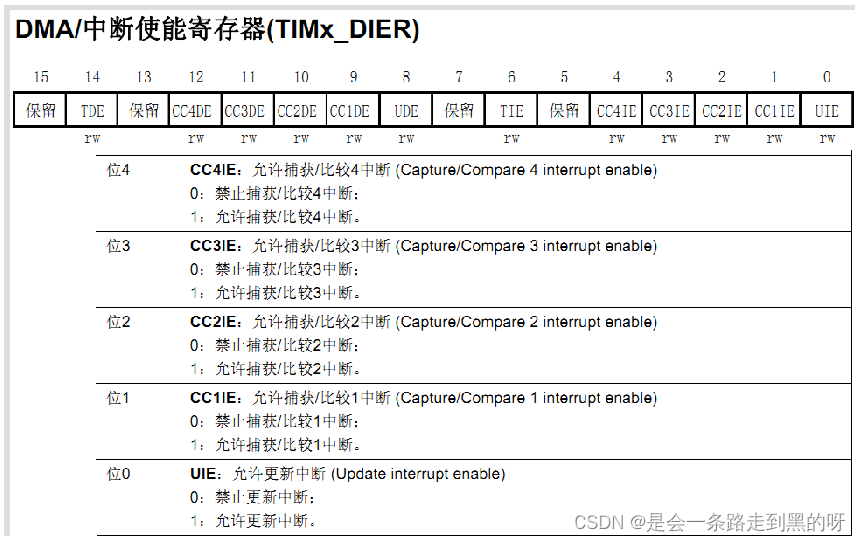
?步驟5:捕獲到有效信號可以開啟中斷
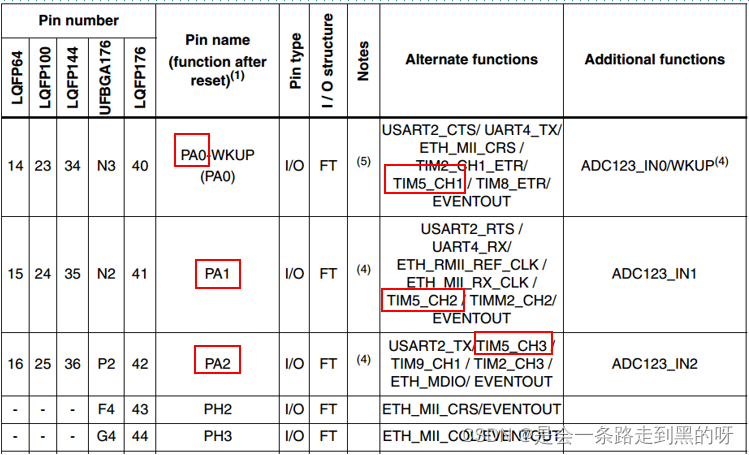
?最后:看看定時器通道對應(TIM5為例)
二、常用寄存器和庫函數配置
輸入捕獲通道初始化函數:
void TIM_ICInit(TIM_TypeDef* TIMx,TIM_ICInitTypeDef* TIM_ICInitStruct);typedef struct
{uint16_t TIM_Channel; //捕獲通道1-4 uint16_t TIM_ICPolarity; //捕獲極性uint16_t TIM_ICSelection; //映射關系uint16_t TIM_ICPrescaler; //分頻系數uint16_t TIM_ICFilter; //濾波器
} TIM_ICInitTypeDef;TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM5_ICInitStructure.TIM_ICFilter = 0x00;
TIM_ICInit(TIM5, &TIM5_ICInitStructure);
?通道極性設置獨立函數:
void TIM_OCxPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
?獲取通道捕獲值:
uint32_t TIM_GetCapture1(TIM_TypeDef* TIMx);
?輸入捕獲的一般配置步驟:
1、初始化定時器和通道對應IO的時鐘
2、初始化IO口,模式為復用:
GPIO_Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;3、設置引腳復用映射:
GPIO_PinAFConfig();
?4、初始化定時器ARR,PSC
TIM_TimeBaseInit();5、初始化輸入捕獲通道
TIM_ICInit();
6、如果要開啟捕獲中斷
TIM_ITConfig();
NVIC_Init();7、使能定時器
TIM_Cmd();
8、編寫中斷服務函數
TIMx_IRQHandler();
三、輸入捕獲實驗講解
實驗目的:測量信號的脈沖寬度
?
?
?main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "timer.h"//ALIENTEK 探索者STM32F407開發板 實驗10
//輸入捕獲實驗 -庫函數版本
//技術支持:www.openedv.com
//淘寶店鋪:http://eboard.taobao.com
//廣州市星翼電子科技有限公司
//作者:正點原子 @ALIENTEKextern u8 TIM5CH1_CAPTURE_STA; //輸入捕獲狀態
extern u32 TIM5CH1_CAPTURE_VAL; //輸入捕獲值 int main(void)
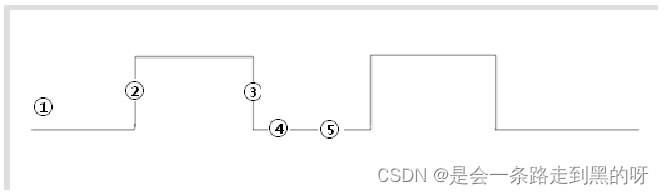
{ long long temp=0; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//設置系統中斷優先級分組2delay_init(168); //初始化延時函數uart_init(115200);//初始化串口波特率為115200TIM14_PWM_Init(500-1,84-1); //84M/84=1Mhz的計數頻率計數到500,PWM頻率為1M/500=2Khz TIM5_CH1_Cap_Init(0XFFFFFFFF,84-1); //以1Mhz的頻率計數 while(1){delay_ms(10);TIM_SetCompare1(TIM14,TIM_GetCapture1(TIM14)+1); if(TIM_GetCapture1(TIM14)==300)TIM_SetCompare1(TIM14,0); if(TIM5CH1_CAPTURE_STA&0X80) //成功捕獲到了一次高電平{temp=TIM5CH1_CAPTURE_STA&0X3F; temp*=0XFFFFFFFF; //溢出時間總和temp+=TIM5CH1_CAPTURE_VAL; //得到總的高電平時間printf("HIGH:%lld us\r\n",temp); //打印總的高點平時間TIM5CH1_CAPTURE_STA=0; //開啟下一次捕獲}}
}
timer.c
#include "timer.h"
#include "led.h"
#include "usart.h"
//
//本程序只供學習使用,未經作者許可,不得用于其它任何用途
//ALIENTEK STM32F407開發板
//定時器 驅動代碼
//正點原子@ALIENTEK
//技術論壇:www.openedv.com
//創建日期:2014/5/4
//版本:V1.0
//版權所有,盜版必究。
//Copyright(C) 廣州市星翼電子科技有限公司 2014-2024
//All rights reserved
// //TIM14 PWM部分初始化
//PWM輸出初始化
//arr:自動重裝值
//psc:時鐘預分頻數
void TIM14_PWM_Init(u32 arr,u32 psc)
{ //此部分需手動修改IO口設置GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //TIM14時鐘使能 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); //使能PORTF時鐘 GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9復用位定時器14GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOA9 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//復用功能GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHzGPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽復用輸出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(GPIOF,&GPIO_InitStructure); //初始化PF9TIM_TimeBaseStructure.TIM_Prescaler=psc; //定時器分頻TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上計數模式TIM_TimeBaseStructure.TIM_Period=arr; //自動重裝載值TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInit(TIM14,&TIM_TimeBaseStructure);//初始化TIM14 Channel1 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //選擇定時器模式:TIM脈沖寬度調制模式2TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //輸出極性:TIM輸出比較極性高TIM_OCInitStructure.TIM_Pulse=0;TIM_OC1Init(TIM14, &TIM_OCInitStructure); //根據T指定的參數初始化外設TIM3 OC2TIM_OC2PreloadConfig(TIM14, TIM_OCPreload_Enable); //使能TIM3在CCR2上的預裝載寄存器TIM_ARRPreloadConfig(TIM14,ENABLE);TIM_Cmd(TIM14, ENABLE); //使能TIM14 } TIM_ICInitTypeDef TIM5_ICInitStructure;//定時器5通道1輸入捕獲配置
//arr:自動重裝值(TIM2,TIM5是32位的!!)
//psc:時鐘預分頻數
void TIM5_CH1_Cap_Init(u32 arr,u16 psc)
{GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5,ENABLE); //TIM5時鐘使能 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能PORTA時鐘 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIOA0GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//復用功能GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHzGPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽復用輸出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; //下拉GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA0GPIO_PinAFConfig(GPIOA,GPIO_PinSource0,GPIO_AF_TIM5); //PA0復用位定時器5TIM_TimeBaseStructure.TIM_Prescaler=psc; //定時器分頻TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上計數模式TIM_TimeBaseStructure.TIM_Period=arr; //自動重裝載值TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInit(TIM5,&TIM_TimeBaseStructure);//初始化TIM5輸入捕獲參數TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; //CC1S=01 選擇輸入端 IC1映射到TI1上TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕獲TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置輸入分頻,不分頻 TIM5_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置輸入濾波器 不濾波TIM_ICInit(TIM5, &TIM5_ICInitStructure);TIM_ITConfig(TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE);//允許更新中斷 ,允許CC1IE捕獲中斷 TIM_Cmd(TIM5,ENABLE ); //使能定時器5NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;//搶占優先級3NVIC_InitStructure.NVIC_IRQChannelSubPriority =0; //子優先級3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根據指定的參數初始化VIC寄存器、}
//捕獲狀態
//[7]:0,沒有成功的捕獲;1,成功捕獲到一次.
//[6]:0,還沒捕獲到低電平;1,已經捕獲到低電平了.
//[5:0]:捕獲低電平后溢出的次數(對于32位定時器來說,1us計數器加1,溢出時間:4294秒)
u8 TIM5CH1_CAPTURE_STA=0; //輸入捕獲狀態
u32 TIM5CH1_CAPTURE_VAL; //輸入捕獲值(TIM2/TIM5是32位)
//定時器5中斷服務程序
void TIM5_IRQHandler(void)
{ if((TIM5CH1_CAPTURE_STA&0X80)==0)//還未成功捕獲 {if(TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET)//溢出{ if(TIM5CH1_CAPTURE_STA&0X40)//已經捕獲到高電平了{if((TIM5CH1_CAPTURE_STA&0X3F)==0X3F)//高電平太長了{TIM5CH1_CAPTURE_STA|=0X80; //標記成功捕獲了一次TIM5CH1_CAPTURE_VAL=0XFFFFFFFF;}else TIM5CH1_CAPTURE_STA++;} }if(TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET)//捕獲1發生捕獲事件{ if(TIM5CH1_CAPTURE_STA&0X40) //捕獲到一個下降沿 { TIM5CH1_CAPTURE_STA|=0X80; //標記成功捕獲到一次高電平脈寬TIM5CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5);//獲取當前的捕獲值.TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); //CC1P=0 設置為上升沿捕獲}else //還未開始,第一次捕獲上升沿{TIM5CH1_CAPTURE_STA=0; //清空TIM5CH1_CAPTURE_VAL=0;TIM5CH1_CAPTURE_STA|=0X40; //標記捕獲到了上升沿TIM_Cmd(TIM5,DISABLE ); //關閉定時器5TIM_SetCounter(TIM5,0);TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Falling); //CC1P=1 設置為下降沿捕獲TIM_Cmd(TIM5,ENABLE ); //使能定時器5} } }TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); //清除中斷標志位
}?演示講解視頻
輸入捕獲實驗講解
多頁簽的實現(Tab))

-- 詳解)















)
 time庫-日期和時間工具)