ubuntu20.04中配置Pyrep和CoppeliaSim
在Ubuntu20.04中配置 Pyrep ,實現應用Python語言的機器人在 Vrep(CoppeliaSim)中的虛擬仿真
一、安裝CoppeliaSim 4.1
1.1 下載適配Ubuntu20.04的CoppeliaSim 4.1軟件
下載鏈接:https://www.coppeliarobotics.com/files/V4_1_0/CoppeliaSim_Edu_V4_1_0_Ubuntu20_04.tar.xz
1.2 解壓安裝包
運行解壓命令:
tar -xf CoppeliaSim_Edu_V4_1_0_Ubuntu20_04.tar.xz
1.3 修改文件名稱
將解壓后的文件名稱修改為:CoppeliaSim
二、安裝PyRep
1.拉取PyRep
運行git命令:
git clone https://github.com/stepjam/PyRep.gitcd PyRep
2.添加環境變量
1).打開bashrc
sudo vim ~/.bashrc
2).編輯bashrc
在.bashrc最下方添加路徑,如下所示
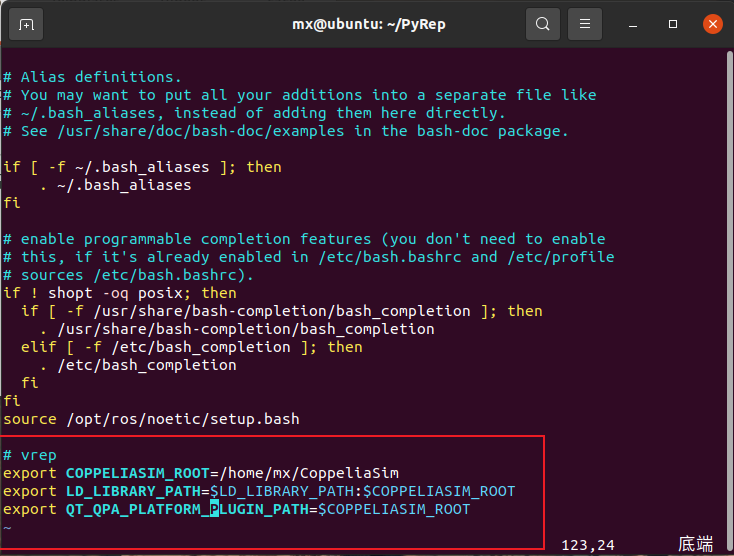
添加命令:
# vrep
export COPPELIASIM_ROOT=/home/mx/CoppeliaSim
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$COPPELIASIM_ROOT
export QT_QPA_PLATFORM_PLUGIN_PATH=$COPPELIASIM_ROOT
(其中的 /home/mx/CoppeliaSim 需要修改為 步驟1.3 中的文件夾路徑)
3).更新bashrc
運行命令:
source ~/.bashrc
3.安裝Python庫
運行命令:
pip3 install -r requirements.txtpython3 setup.py install --user
三、運行測試
運行命令:
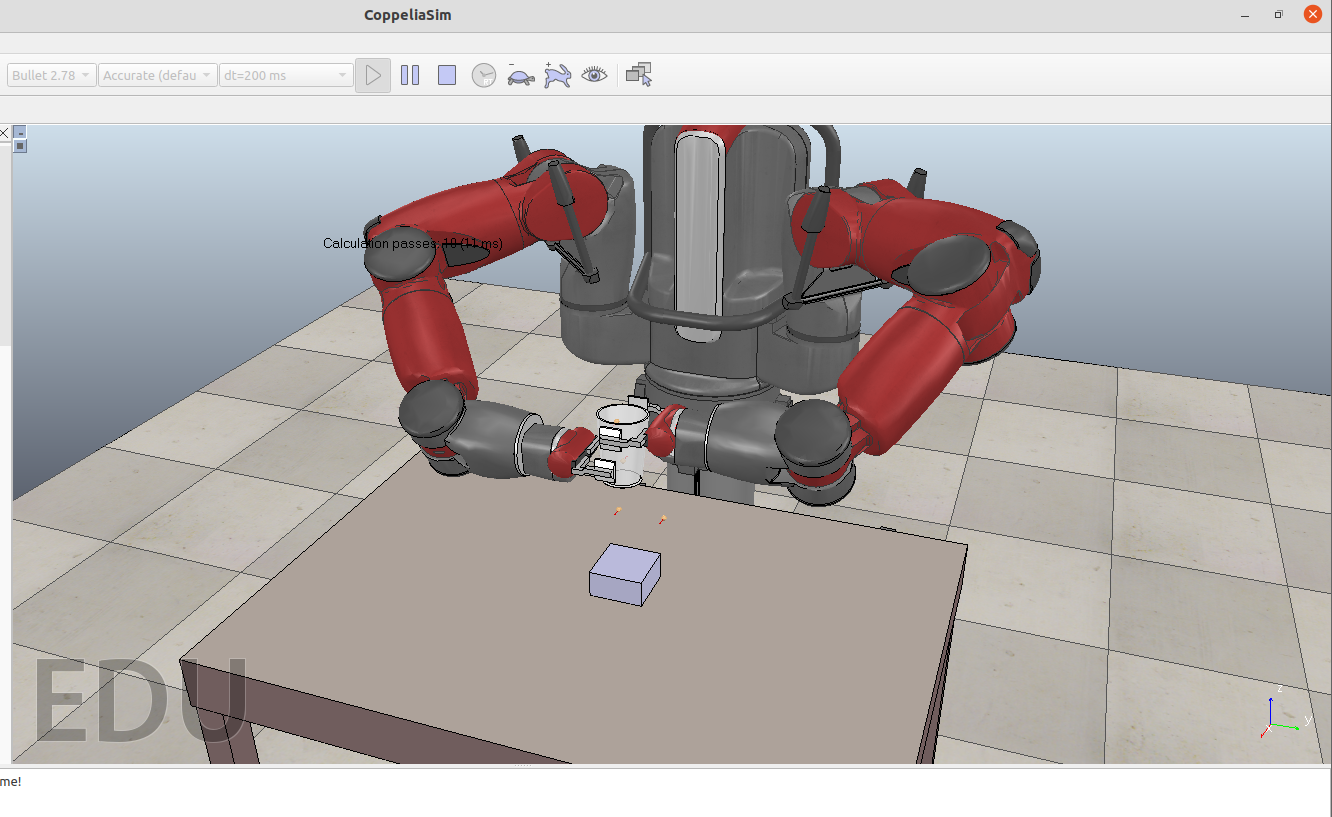
python3 examples/example_baxter_pick_and_pass.py
正常運行界面如下:



:含了算法競賽中常用的數據結構和算法實現,助力開發者更高效地解決問題)
)





)




之前端編譯過程與語法糖原理)
基于大語言模型LangChain與ChatGLM3-6B本地知識庫調優:數據集優化、參數調整、Prompt提示詞優化實戰)


