《測繪學報》
構建與學術的橋梁 拉近與權威的距離
復制鏈接,關注《測繪學報》抖音!
【測繪學報的個人主頁】長按復制此條消息,長按復制打開抖音查看TA的更多作品##7NsBSynuc88##[抖音口令]
本文內容來源于《測繪學報》2020年第10期,審圖號GS(2020)5551號。
基于狀態和殘差的北斗基準站觀測數據表達與信息分級
周樂韜1 ,黃丁發1
,黃丁發1 ,袁林果1,馮威1,龔曉穎1,田玉淼1,張熙2,趙英豪1
,袁林果1,馮威1,龔曉穎1,田玉淼1,張熙2,趙英豪1
1.西南交通大學地球科學與環境工程學院測繪遙感信息系, 四川 成都 611756;2.四川省第一測繪工程院, 四川 成都 610049
基金項目:國家重點研發計劃(2016YFB0501900);國家自然科學基金(41874008)
摘要:北斗衛星導航系統基準站通常直接存儲傳輸原始觀測量,導致了兩種不利情況:①沒有形成對用戶的分級授權機制,任意用戶通過原始觀測量都可以獲取基準站的精確空間基準、時間基準和大氣基準數據,這會對基準站的安全構成潛在威脅;②原始觀測量之間的強相關性導致其數據量很大,在北斗接收機觀測顯現網絡化、不間斷、高采樣和多波段的趨勢下,觀測數據的海量爆發給數據的存儲和傳輸都帶來了巨大的壓力。因此,本文提出利用狀態和殘差來表達北斗基準站觀測數據。與通用的基于RINEX、Compact RINEX和RTCM等國際協議的數據服務相比,其優點是不但可以對不同級別用戶進行信息分級授權,從技術上保障數據服務的安全,而且大幅減小了存儲傳輸數據量和用戶端計算量。同時本文證明了新的表達方式與原始數據等效,不會降低最終計算結果的精度。利用該方法可以建立具有自主知識產權的北斗觀測數據存儲和傳輸協議,并為高精度星基數據播發服務提供技術支持。
關鍵詞:分級 狀態 殘差 數據協議 星基播發 網絡RTK 精密單點定位


引文格式:周樂韜, 黃丁發, 袁林果, 等. 基于狀態和殘差的北斗基準站觀測數據表達與信息分級. 測繪學報,2020,49(10):1265-1274. DOI: 10.11947/j.AGCS.2020.20190300.
閱讀全文:http://xb.sinomaps.com/article/2020/1001-1595/20201003.htm
全文概述
基準站是北斗衛星導航系統的重要組成部分,在精確定位、導航和定軌領域發揮著重要作用。隨著北斗衛星導航系統的高速發展,北斗基準站在全國的布設數量越來越多、范圍越來越廣,加強衛星導航定位基準站監管,保障國家地理信息安全十分必要[1]。2017年修訂的《中華人民共和國測繪法》明確寫入了基準站的建設和數據安全條款。該法的實施一方面為北斗基準站的數據安全服務提供了法律保障,另一方面,也使大量基準站為了免除法律責任而趨于保守地提供數據服務,造成了某種程度的資源浪費,特別是對具有高精度實時動態定位需求的產業發展造成了一定的影響。鑒于以上情況,為了更加安全、高效和積極地服務于經濟建設和社會需求,北斗基準站數據服務面臨幾個亟待解決的問題。
北斗基準站數據服務的首要問題是基準站的安全問題。通常,用戶需要獲取基準站的觀測數據并與本站數據進行聯合解算,才能進行精確的定位導航。一旦基準站將這些數據提供給用戶,相當于把其空間基準[2]、時間基準和大氣基準全部暴露給用戶,這會對基準站的安全構成潛在威脅,而大部分用戶通常的需求是對自身進行精確定位授時,基準站的基準信息對其并非必要數據。因此,開發一種既可對空間基準、時間基準和大氣基準授權用戶提供數據分級服務,同時又不影響用戶自身進行精確定位授時的數據表達方法,極具實用價值。目前的解決方法是利用虛擬基準站技術[3-4],設定一個遠離原基準站的虛擬基準站,從而對用戶屏蔽物理基準站的基準信息。但是虛擬基準站無法為基準信息授權用戶提供準確基準信息,更無法提供獨立的基準信息分級服務。
北斗基準站數據服務還存在數據量大的問題。由于北斗基準站布設數量的大幅增加,同時接收機的觀測呈現不間斷、高采樣和多波段的特點,導致觀測數據呈海量爆發,這給其存儲和傳輸都帶來巨大的壓力。另外,對于地面通信不暢或缺失的地區,北斗基準站的數據服務有星基播發的需求,而衛星通信的帶寬是有限的,因此減小傳輸數據量具有重要意義。使用數據編碼的方法可以壓縮數據量[5-6],但其缺陷是需要解壓縮才能使用,計算量大且實時性差。目前,國際上通常采用Compact RINEX和RTCM格式。Compact RINEX使用歷元間數據求差的方法壓縮觀測數據[7],RTCM使用同一個歷元的不同類型的數據間求差的方法壓縮觀測數據[8]。兩種格式的數據量得到一定程度的減小,但都是基于原始觀測量的數據表達,而各衛星、各頻率、各歷元觀測值之間都具有相關性,通過去相關的方法大幅減小其數據量則更有效。
為了解決上述兩個問題,本文提出利用狀態和殘差來表達北斗基準站觀測數據,將觀測向量由觀測空間映射到狀態空間來降低數據維度,同時生成殘差向量吸收未建模誤差,在基準站接收機端從原始觀測量直接分離基準、狀態和殘差信息,最大程度降低數據間的相關性和數據量。從而利用基準信息對分級授權用戶進行基準信息服務,利用狀態和殘差信息進行定位、導航和授時服務。
1 基于狀態和殘差的觀測數據表達
觀測數據的殘差和狀態表達(state and residuals representation,SRR)方法[9]分為3個步驟:①從觀測數據中消除基準信息,生成偽觀測值;②進行狀態估計和殘差計算,即將偽觀測向量表達為各元素之間相互獨立的狀態向量的線性組合,通過最小二乘把觀測向量從高維(觀測量的維數)空間向低維(狀態量的維數)子空間(狀態空間)進行投影,由于狀態量各元素之間相互獨立,從而削弱了相關性,達到減小數據量的目的;③殘差的時域差分,由于觀測模型的不完善導致殘差向量時間序列通常含有有色噪聲,因此殘差量也具有時間相關性,故對殘差進行時域差分,進一步減小數據量。如果要增加效率,還可以使用小波壓縮方法[10]。這3個步驟可以在各個基準站接收機上實時獨立完成,原始數據即可表達為狀態和殘差數據。
1.1 消除已知信息
基準站應該具有某參考框架下精確的空間坐標、配有標定好的原子鐘,以及水汽輻射計和氣溫、氣壓、濕度等氣象測量設備。因此,可以精確獲取其空間基準、時間基準和天頂濕延遲基準。但大部分基準站條件有限,沒有原子鐘和水汽輻射計,只能獲取其空間基準信息,因此,消除了已知信息的關于相位和碼的偽觀測值φ和ρ由式(1)計算

(1)
式中,下標i表示頻率序號,通常基準站的觀測頻率個數大于等于2;?和α表示相位和碼觀測值;λ為波長;R=|Xs-Xr|,表示星站幾何距離;Xs和δ表示通過廣播星歷或精密星歷計算的衛星坐標和衛星鐘差(已做地球自轉和相對論效應改正);Xr為基準站天線參考點的精確空間坐標;c為真空中光速;mh和mω表示干延遲映射函數和濕延遲映射函數[11];h和ω為天頂對流層干延遲和天頂對流層濕延遲,均使用國際地球自轉服務約定模型[12-14],其中氣象模型使用GPT2全球模型[15],對于配有水汽輻射計的基準站,ω則為水汽輻射計測量的天頂對流層濕延遲;pi為天線相位中心偏差改正[16-17]。對于長基線用戶和精密單點定位用戶,為了確保精度應使用精密星歷。
1.2 狀態估計和殘差計算
相對于基準站坐標、天頂對流層延遲等低頻信息,接收機鐘差和電離層延遲變化較快,但可以假設短周期內(比如10s內)的電離層延遲變化和大部分基準站的接收機鐘差符合線性模型,因此,在每周期內都可以建立接收機鐘差、鐘速、電離層延遲及其變化率的時不變觀測模型

(2)
式中,下標i表示頻率序號;ρ和φ是式(1)中消去已知信息的相位和碼對應的偽觀測值;f和λ是對應的頻率和波長;dt是每個周期內的第1個歷元的接收機鐘差;d?是接收機鐘速;Δt是該歷元與周期內第1個歷元的時間差;E=40.3c-2TEC,E定義為每個周期內第1個歷元的路徑電子含量;?為其變化率;u為相位未建模誤差,其中包括了整周模糊度、硬件延遲和其他低頻變化的誤差(以周為單位);μ為接收機偽距相對硬件延遲,只與頻率有關,與衛星無關,當頻率個數為k時,設置k-1個碼偽距相對硬件延遲參數[18];ε和?代表觀測噪聲,均服從零均值高斯分布,ε的方差為10-4sin-2θ平方周,精碼?的方差為0.1sin-2θm2,粗碼?的方差為sin-2θm2,θ是對應衛星的高度角,在同一周期內,為了簡化計算,可以認為衛星高度角為常數。
若一個周期內觀測了m個歷元,n顆衛星和k個頻率(k>1),根據式(2)形成數學模型
 (3)
(3)
式中,

;φ和ρ均是通過式(1)計算的mnk行1列的偽觀測向量,其中φ已經探測和修復了周跳,并剔除了粗差;Aφ和Aρ為對應于相位觀測值和碼觀測值的系數矩陣,均為mnk行2+2n列;Bφ是mnk行nk+k-1列的矩陣,其中最后k-1列元素都為零;Bφ為mnk行nk+k-1列的偽距相對硬件延遲系數矩陣,該矩陣前nk列元素都為零;X是2+2n行1列的待估狀態量,其中包括接收機鐘差、鐘速兩個參數,以及n個路徑電子含量參數和n個電子含量變化率參數;U為nk+k-1行1列的未建模誤差參數,包括nk個相位未建模誤差參數和k-1個偽距相對硬件延遲參數;ζ為2mnk行1列的觀測噪聲;ζ服從均值為零、方差為Dζ的高斯分布;Dζ為2mnk維的對角陣。
未建模誤差U的變化是極緩慢的,但是在式(3)的模型中,受偽距噪聲和多路徑效應的影響,相鄰周期的估值之間會發生很大的跳變,因此加入未建模誤差的狀態約束模型
 (4)
(4)
式中,U為上一周期的未建模誤差估值;C=[0I],C為nk+k-1行2+2n+nk+k-1列的矩陣,I為nk+k-1維單位陣;ξ為nk+k-1行1列的狀態轉移噪聲;Dξ為nk+k-1維的對角陣;對應于相位未建模誤差的對角元素設為0.0004τ平方周,對應于偽距相對硬件延遲的對角元素設置為0.0001τm2,τ為周期時長,以s為單位。當使用新的數據齡期的廣播星歷時,τ設為無窮大。
上述模型在第一個周期是秩虧的,原因是路徑電子含量沒有約束條件,并且與偽距相對硬件延遲形成了秩虧自由網,為了減小路徑電子含量的存儲空間(值域范圍),對其進行重心約束[19]
 (5)
(5)
式中,S為1行2+2n+nk+k-1列的系數陣,其對應于路徑電子含量的n個參數的系數均為1,對應于其他參數的系數均為0;ζ為零均值,方差為σζ2的高斯噪聲,通過統計Klobuchar模型[20-21]的斜路徑電子含量的方差,將σζ2設為2500平方米之一。
聯立式(3)、式(4)、式(5),通過最小二乘求解得到狀態參數和未建模誤差的估值,同時求得殘差
(6)
式中,Wφ為相位殘差,單位為周; Wρ為偽距殘差,單位為m;?則作為式(4)的未建模誤差預測值參與到下一個周期的計算。
Wρ為偽距殘差,單位為m;?則作為式(4)的未建模誤差預測值參與到下一個周期的計算。
由于值域范圍的減小,偽觀測值L的數據量小于原始觀測值的數據量,通過式(6)又可以將偽觀測量L表達為狀態量 W的形式。L的維度為2mnk,的維度遠小于L,僅為2+2n;W的值域范圍很小,其中Wφ的值域范圍是[0, 1)。因此,基于狀態和殘差的觀測數據表達方式能夠大幅減小數據量。
W的形式。L的維度為2mnk,的維度遠小于L,僅為2+2n;W的值域范圍很小,其中Wφ的值域范圍是[0, 1)。因此,基于狀態和殘差的觀測數據表達方式能夠大幅減小數據量。
對于采樣間隔較大(10s及大于10s)的情況,周期時長與采樣間隔相等,因此,一個周期只有一個觀測歷元,即每個歷元都對接收機鐘差和路徑電子含量進行估計,式(2)中則不設鐘速和路徑電子含量變化率參數,式(3)也要進行相應的改變。限于篇幅,不再贅述。
1.3 殘差的時域差分
當觀測采樣率較高時,殘差量具有較強的時間相關性,本文使用時域差分方法減小其相關性,進一步減小數據量。Wφ和Wρ是一個計算周期內m個歷元的所有殘差值,所以可設

,則相對殘差為

(7)
式中,j=1, 2, …,m-1。Wφ, j和Wρ, j是第j+1歷元的相位和碼殘差,Wφ, 0和Wρ, 0是第一個歷元的相位和碼殘差。顯然,首歷元的殘差W0和其他歷元的相對殘差ΔWj比殘差W的數據量小,因此,存儲、傳輸W0和相對殘差ΔWj更高效。
2 基準信息分級授權的數據服務方法
在式(1)中,基準站坐標和天頂對流層延遲為外部獨立測量信息,可以作為空間基準和大氣基準。如果沒有外部獨立測量信息,則可以通過式(6)進行估計,以狀態的估值作為基準,式(2)中的接收機鐘差和路徑電子含量就是待估狀態信息,其估值也可以作為基準。通常,利用外部獨立測量的基準信息精度高,通過狀態參數估計的基準信息精度較低。利用這些基準信息和殘差信息進行組合,就可以提供基準信息分級授權的基準站數據服務。不同的基準站數據采樣率和用戶授權級別需要的數據類型是不同的,其關系見表 1,黑點代表需要的數據類型。
表 1 基準信息分級授權的基準站數據服務內容Tab. 1 Data service content of base station authorized by base information classification
| 采樣間隔/s | 數據類授型權級別 | 基準站坐標 | 天頂對流層延遲 | 接收機鐘差 | 接收機鐘速 | 路徑電子含量 | 電子含量變化率 | 殘差 | 相對殘差 |
| <10 | 民用差分 | ● | ● | ● | |||||
| <10 | 空間基準 | ● | ● | ● | ● | ||||
| <10 | 時間基準 | ● | ● | ● | ● | ● | |||
| <10 | 大氣基準 | ● | ● | ● | ● | ||||
| ≥10 | 民用差分 | ● | ● | ||||||
| ≥10 | 空間基準 | ● | ● | ● | |||||
| ≥10 | 時間基準 | ● | ● | ● | |||||
| ≥10 | 大氣基準 | ● | ● | ● | |||||
| ≥10 | 民用PPP | ● |
表選項
依據表 1,利用單基準站接收機自帶處理器即可實時解算上述產品,并提供基準站數據服務:①對于定位導航、授時和氣象應用需求的民用差分用戶,可以只提供殘差和路徑電子含量數據(由于缺失基準站的基準信息,因此無法恢復原始觀測值);②對于空間基準、時間基準和大氣基準的單獨授權用戶和組合授權用戶(通常是特許用戶),不僅提供基準站的殘差和路徑電子含量數據,同時也提供相應的獨立基準信息和組合基準信息;③對于最高級別用戶,提供所有的基準信息和殘差信息,這些信息與原始數據等效,可以通過其恢復原始觀測值;④星基播發常用于精密單點定位或者廣域差分,用戶通常遠離基準站,基準站路徑電子含量與用戶站路徑電子含量間相關性很弱,因此,星基播發只需要播發殘差量(需使用精密星歷計算)。可以看出:民用精密單點定位用戶需要的數據量最少,其次是民用差分用戶,所需數據量最多的是基準授權用戶;各狀態量的存儲和傳輸頻率與其變化頻率成正比,存儲傳輸頻率由低到高依次為基準站坐標、天頂對流層延遲、接收機鐘差和鐘速、路徑電子含量及其變化率。殘差量的存儲和傳輸頻率與原始觀測值一致。
3 基于基準站狀態及殘差數據的解算模型
通過基準站單站處理,即可生成基準站狀態及殘差數據產品進行發布,無論是定位導航終端差分用戶、精密單點定位用戶,還是基準站網絡服務端用戶,都可以利用狀態和殘差數據產品建立解算模型。其解算模型與基于原始觀測值的雙差模型等價,計算量更小,本節予以證明。
3.1 終端用戶差分解算模型
針對定位導航終端用戶,利用上述基準站的路徑電子含量和殘差數據,可以建立差分模型

(8)
式中,▽為星間單差算子,▽(·)=(·)s-(·)r,其中上標s表示目標衛星,上標r表示參考衛星;Δ▽為雙差算子,Δ▽(·)=(·)us-(·)ur-(·)rs+(·)rr,下標u表示用戶站,下標r表示基準站; R0表示衛星坐標與用戶站天線參考點概略坐標X0之間的幾何距離(應該通過數據協議保障用戶在相同的歷元使用與式(1)一致的星歷);
R0表示衛星坐標與用戶站天線參考點概略坐標X0之間的幾何距離(應該通過數據協議保障用戶在相同的歷元使用與式(1)一致的星歷); x為3行1列的坐標改正數向量;mω為用戶站上的濕延遲映射函數;N為整周模糊度。式(8)中路徑電子含量Er和殘差w是基準站服務數據;wφ表示基準站的相位殘差;wρ表示基準站的偽距殘差;φi和ρi都是用戶站信息。
x為3行1列的坐標改正數向量;mω為用戶站上的濕延遲映射函數;N為整周模糊度。式(8)中路徑電子含量Er和殘差w是基準站服務數據;wφ表示基準站的相位殘差;wρ表示基準站的偽距殘差;φi和ρi都是用戶站信息。
結合式(1)、式(2)和式(6),可以推導出基準站上的星間單差數據符合式(9)

(9)
考察基于原始觀測值的雙差觀測方程

(10)
式中,Δ▽R0表示參考衛星、目標衛星與用戶站概略坐標、基準站形成的雙差幾何距離;

將式(9)代入式(8),容易證明式(8)和式(10)相位方程偽觀測值之差為對應波長的整數倍,式(8)和式(10)測碼方程偽觀測值相等,式(8)待估參數系數矩陣與式(10)相同,式(8)與式(10)隨機模型相同,所以式(8)與式(10)等價,兩式解算的模糊度會有整數偏差,而待估參數固定解是完全相同的。因此,基于狀態和殘差數據的差分模型與基于原始觀測值的雙差模型最終結果完全相同。
比較式(8)與式(10)在用戶端的計算量,發現式(10)還需要額外計算基準站的接收機鐘差、站星幾何距離、對流層延遲、相位中心偏差等,因此,使用本方法還可以減小計算量。
另外,式(8)也可用于網絡RTK用戶,通過基準站網絡可以估計用戶與主基準站間的路徑電子含量,將其合并到主基準站的路徑電子含量中,與主基準站的殘差數據一同發送,用戶就可以進行網絡RTK定位,限于篇幅,不再贅述。
3.2 終端用戶精密單點定位解算模型
針對精密單點定位用戶,利用基準站的星間單差殘差(精密星歷計算),可以建立PPP模型

(11)
式中,基準站的星間單差殘差包含了衛星端的所有未建模誤差,包括了精密單點定位的相位小數偏差(fractional bias isolating,FBI)或未標定的相位延遲(uncalibrated phase delays,UPD)產品[22-24],Δ▽υi為基準站、用戶站及衛星的精確模型改正量在路徑方向投影的雙差值,這些模型改正包括相位纏繞、固體潮汐、海洋潮汐(若測站靠近海洋)、電離層高階項等,Δ▽υi在用戶端進行計算(基準站須提供10km級精度的粗略坐標)。
3.3 基準站網絡服務端解算模型
針對基準站網絡服務端,利用各基準站的殘差,服務端可建立基準站基線的差分模型

(12)
式中,Δ▽e為雙差路徑電子含量Δ▽E的改正數;Δ▽E為基準站狀態量;當Δ▽e得到固定解后,可以求得基準站間的精確雙差路徑電子含量,從而為用戶提供網絡RTK服務。
考察基準站基線的雙差觀測方程,同理可以證明式(12)與基于原始觀測值的雙差觀測模型等價

(13)
式中,Δ▽W為通過模型計算的基準站基線的雙差對流層濕延遲。
比較式(12)與式(13)在服務端(數據中心)的計算量,同理可知式(12)計算量更小。
針對授時用戶,通常只使用高度角最高的共視衛星建立基于狀態和殘差的授時觀測模型,同理可以證明該模型與基于原始觀測值的單差授時觀測模型等價,限于篇幅,不再贅述。
4 數據實例
本文利用IGS-MEGX觀測網的JFNG站(湖北九峰站)2019年1月10日10:30—11:30的采樣率為1s的多模壓縮數據還原成RINEX文件,使用其中的北斗三頻觀測數據;星歷數據為廣播星歷;精確空間坐標為多個IGS分析中心的融合解,參考到IGS14框架(CGCS2000與WGS-84一致誤差為厘米級[25])、參考歷元為2019年1月10日;氣象參數使用GPT2模型,天頂對流層干延遲和濕延遲使用Saastamoinen模型、映射函數使用GMF模型;天線相位中心使用igs14.atx模型;利用本文方法研制了GSRR(GNSS state and residuals representation)軟件,將觀測值表達為狀態及殘差數據。
圖 1為觀測時段內北斗三頻B1、B3和B2頻率(RINEX表達為L1、L6、L7)的碼偽距和相位殘差,偽距和相位殘差都呈緩慢變化;殘差主要包括軌道誤差、衛星鐘差殘差、多路徑效應、相位纏繞、地球固體潮汐等誤差;如果要進一步減小殘差值域,需要使用精密星歷,并且對上述誤差進行改正;當相位殘差大于1或者小于0的值時,自動加入1周周跳,讓殘差恢復到1周范圍內,這種周跳很容易修復;圖中相位殘差中的飛點是接收機鐘差發生較大跳變導致的狀態估值產生的偏差,從而使殘差產生相應的變化。

圖 1 北斗三頻(L1、L6、L7)偽距殘差及相位殘差Fig. 1 Pseudorange and phasere sidualsat three frequencies of BeiDou L1, L6, L7
圖選項
圖 1顯示碼偽距殘差的值域為±5m以內,相位殘差的值域為1周以內,若設置碼偽距殘差的截斷誤差(分辨率)為2cm、相位殘差截斷誤差為0.001周,則本文方法最多用3位有效數字(0~999)就可以表示碼偽距或相位殘差,而RINEX格式中碼偽距或相位觀測值則需要14位。
除了殘差以外,本方法還需要記錄狀態信息,包括路徑電子含量和接收機鐘差等效距離,如圖 2和圖 3所示,可以看出路徑電子含量和接收機鐘差等效距離具有很強的時間相關性,可以使用文中的時域差分方法進一步減小數據量。
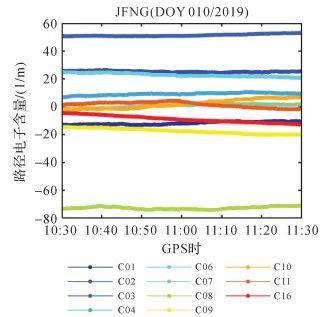
圖 2 路徑電子含量Fig. 2 Electron content on slant path
圖選項

圖 3 接收機鐘差等效距離Fig. 3 Equivalent distance of receiver clock offset
圖選項
圖 4第1、2和3數據塊分別顯示了JFNG站北斗觀測數據的RINEX格式數據、Compact RINEX格式數據和狀態及殘差表達(SRR)的數據,可以直觀地看出SRR格式數據量最小。該時段北斗三頻數據的RINEX格式、Compact RINEX格式數據和SRR格式的文本文件大小分別為5874KB、1403KB和1032KB,SRR格式的文件是RINEX文件大小的17.5%,是Compact RINEX文件大小的73.5%。

圖 4 RINEX格式、Compact RINEX格式和SRR格式數據量對比Fig. 4 Data volume comparison of RINEX format, compact RINEX format and SRR format
圖選項
表 2顯示了1個觀測周期內觀測了m個歷元n顆衛星k個頻率的數據時,RINEX格式、SRR文本格式、RTCM MSM格式和SRR二進制格式的數據量的對比情況。通過對大量數據的解算結果進行統計,可以確定殘差和狀態的值域范圍:其中偽距殘差的值域為[-5.12, 5.10],單位為m,偽距相對殘差的值域為[-1.28, 1.26],單位為m;SRR文本格式中相位殘差值域為[0, 0.999],單位為周,相位相對殘差值域為[-0.128, 0.127],單位為周;SRR二進制格式中相位殘差值域為[0, 0.998],單位為周,相位相對殘差的值域為[-0.128, 0.126],單位為周;路徑電子含量值域為[-409.6, 409.5],單位為m-1,路徑電子含量變化率值域為[-1.28, 1.26],單位為m-1s-1;接收機鐘差值域為[-524.288, 524.287],單位為m,接收機鐘速值域為[-0.2048, 0.2046],單位為m/s;根據上述狀態和殘差的值域及表 2中對應的分辨率,就可以確定其數據量的大小。其中SRR文本格式的相位殘差分辨率設置與RINEX相位觀測值分辨率一致,SRR二進制格式的相位殘差分辨率設置略高于RTCMMSM相位觀測值的分辨率,因此,其相位數據精度完全能與原始數據保持一致。SRR二進制格式的偽距殘差分辨率與RTCMMSM偽距觀測值分辨率一致,均為0.02m。在實際數據處理中,由于觀測噪聲和多路徑效應的影響,偽距分辨率設為0.02m已經足夠,因此,RINEX格式的偽距觀測值分辨率過高(0.001m),SRR文本中,設置偽距殘差分辨率為0.02m。
表 2 各數據格式數據量對比Tab. 2 Data volume comparison of different data formats
| 項目 | 碼偽距(殘差) | 相位(殘差) | 路徑電子含量 | 路徑電子含量變化率 | 接收機鐘差 | 接收機鐘速 |
| RINEX/字符 | 14mnk | 14mnk | ||||
| RINEX分辨率 | 0.001m | 0.001周 | ||||
| SRR文本/字符 | ≤3mnk | ≤3mnk | ≤4n | ≤2n | ≤6 | ≤4 |
| SRR分辨率 | 0.02m | 0.001周 | 0.1m-1 | 0.02m-1/s | 0.001m | 0.0002m/s |
| RTCMMSM/位 | 15mnk | 22mnk | ||||
| RTCM分辨率 | 0.02m | 0.0005m | ||||
| SRR二進制/位 | 2nk+7mnk | 2nk+7mnk | 13n | 7n | 20 | 12 |
| SRR二進制分辨率 | 0.02m | 0.002周 | 0.1m-1 | 0.02m-1/s | 0.001m | 0.0002m/s |
表選項
根據表 2,假設某觀測時段內觀測了10個歷元,每歷元觀測10顆北斗衛星,每顆衛星有3個頻率,RINEX觀測值數據量為8400字符,SRR文本格式數據量不超過1870字符,后者為前者的22.2%,RTCM MSM觀測值數據量為11100比特,SRR二進制格式數據量為4552比特,后者為前者的41%,數據量得到顯著減小。
5 結論
本文提出利用狀態和殘差(SRR)來表達北斗基準站觀測數據,從而分離基準數據、狀態和殘差數據,研制了SRR數據產品生成軟件——GSRR,設計了基準站數據分級授權服務方法,證明了基于SRR數據的解算模型與基于原始觀測值的解算模型的等價性。與通用的基于RINEX、Compact RINEX和RTCM等國際協議的數據服務相比,本文闡明了SRR數據服務具有以下優勢:①可以對不同級別用戶進行基準信息分級授權,非授權用戶無法獲取基準信息,從技術上保障基準站數據服務的安全;②大幅減小了存儲傳輸數據量和用戶端計算量,并利用數據實例進行了驗證。與RINEX相比,SRR文本數據量減小了近80%;與RTCM MSM相比,SRR二進制數據量減小了近60%。利用該方法可以建立具有自主知識產權的北斗觀測數據存儲和傳輸協議,并為高精度星基數據播發服務提供技術支持。
作者簡介
第一作者簡介:周樂韜(1977-), 男, 副教授, 博士生導師, 研究方向為大地測量與導航。E-mail:ltzhou@swjtu.edu.cn
通信作者:黃丁發, E-mail:dfhuang@swjtu.edu.cn


重磅!! | 姚宜斌, 楊元喜, 孫和平, 李建成:大地測量學科發展現狀與趨勢
綜述 | 樓良盛,劉志銘,張昊,錢方明, 黃艷:天繪二號衛星工程設計與實現
通知丨關于舉辦第三屆遙感應用技術論壇的通知
回顧經典 | 王任享, 王建榮, 李晶, 等:天繪一號03星無控定位精度改進策略

權威 | 專業 | 學術 | 前沿
微信、抖音小視頻投稿郵箱 | song_qi_fan@163.com
歡迎加入《測繪學報》作者QQ群: 751717395
進群請備注:姓名+單位+稿件編號




![streaming接mysql數據庫_[Spark streaming舉例]-- 實時統計并且存儲到mysql數據庫中](http://pic.xiahunao.cn/streaming接mysql數據庫_[Spark streaming舉例]-- 實時統計并且存儲到mysql數據庫中)




:語言處理和Python)

)



搭建網站(nginx+php+mysql+ddclient))


![一幫一python_[python]L1-030?一幫一?(15分)](http://pic.xiahunao.cn/一幫一python_[python]L1-030?一幫一?(15分))
