本機器人機械結構設計相關的所有設計文件下載地址為:傳送門
?其中包含:三維造型設計文件(所有零件+裝配效果)(tips:基于Solidworks 2015 繪制)
非標加工的零件圖紙(PDF格式+Dwg格式)
本開源機器人項目首要目的是讓感興趣的朋友花很少的錢就能玩轉功能簡單的機器人,了解機器人的搭建過程并學習ROS系統(如機器人SLAM),因此結構設計的目標和原則很明確:設計一款輪式機器人,滿足功能要求的基礎上盡量做到成本低廉,總之花小錢多辦事。
例如,最終筆者在非標準金屬加工件的的總投入是115元RMB(包含郵費,價格很低了吧 ^_^ ,當然這不包括購買的標準件,后面具體講),這首先就是因為在設計之初就考慮零部件加工工藝及成本,其次說明現在機加工行業競爭真的很激烈。。。(實體加工企業日子難熬。。。)
一、開源機器人結構設計
首先看一下這個開源機器人在機械結構上共分為13個部分,它們的分布和位置關系如圖1所示。
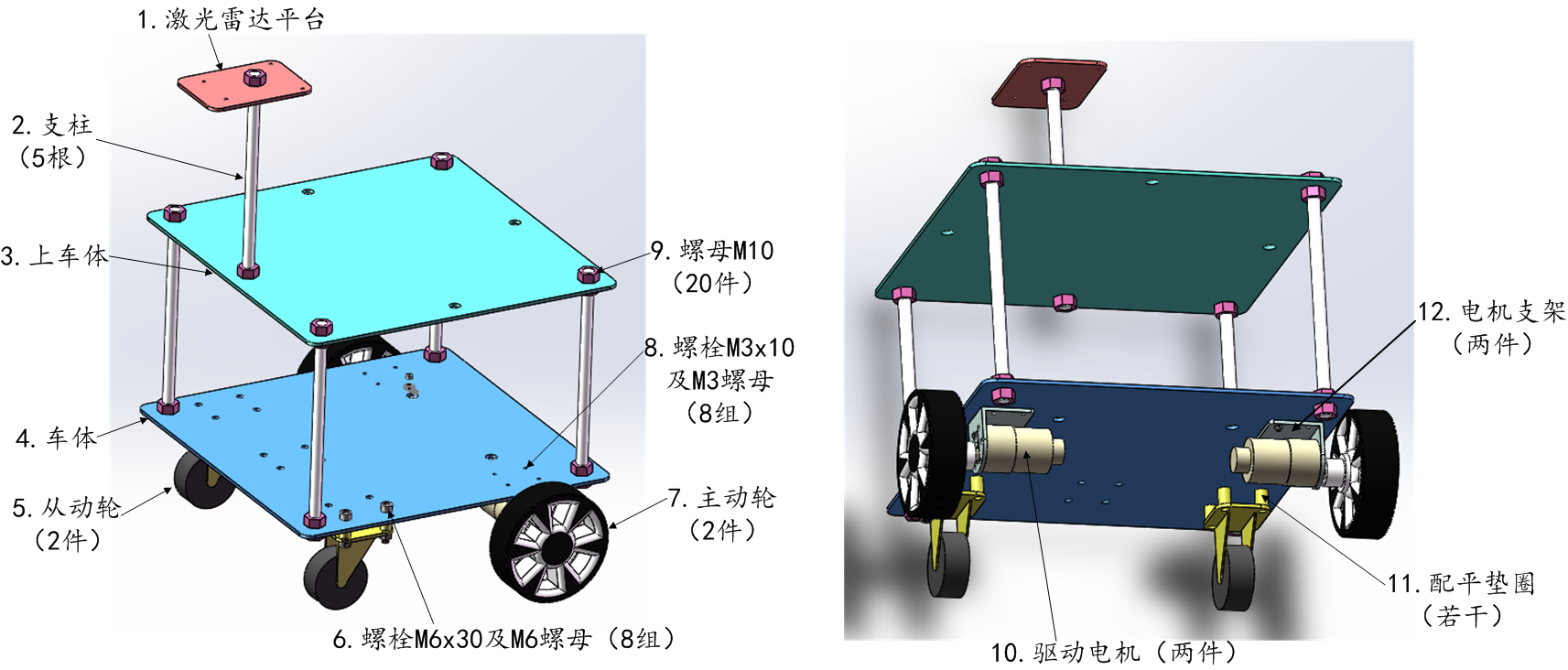
圖1?機械構成
? 每個組成部分的功能基本上都能在圖1中看出來,為了說明更詳細,列出下面的表格,對他們的詳細功能進行細致的說明。
| 序號 | 名稱 | 功能 | 數量 | 是否機加 | 備注 |
| 1 | 激光雷達平臺 | 固定激光雷達? | 1 | ?是 | ? |
| 2 | 支柱 | ?支撐和鏈接車體4及上車體3 | 5 | ?否 | ? |
| 3 | 上車體 | ?機器人上層平臺用于放置激光雷達平臺1及電腦(或ARM開發板) | 1 | ?是 | ? |
| 4 | 車體 | 機器人下層平臺用于鏈接主、從動輪及放置嵌入式硬件、電池等? | 1 | 是? | ? |
| 5 | 從動輪 | 萬向從動輪? | 2 | 否? | 某寶購買? |
| 6 | 螺栓M6x30及M6螺母 | ?將從動輪5固定到車體4上 | 8(組) | 否? | 內六角圓柱頭螺釘? |
| 7 | 主動輪 | ?驅動機器人 | 2 | 否? | 某寶購買? |
| 8 | 螺栓M3x10及M3螺母 | 將主動輪7固定到車體4上? | 8(組) | 否? | 內六角圓柱頭螺釘? |
| 9 | 螺母M10? | 將支柱2連接到車體4、上車體3以及激光雷達平臺1上? | 20? | 否? | 鋁合金材質? |
| 10 | 驅動電機? | 驅動主動輪7? | 2? | 否? | ?某寶購買 |
| 11 | 配平墊圈M6? | ?配平從動輪5,使得主動輪7和從動輪5支撐起來的車體4水平 | ?若干 | ?否 | ? |
| 12 | 電機支架? | ?將驅動電機10固定到車體4上 | 2? | 否? | ?隨電機配套購買 |
從上表中可以看出,6、8、9、11為標準件,直接按照規格購買即可,這里就不在贅述,下面分析幾個需要加工的非標準件。
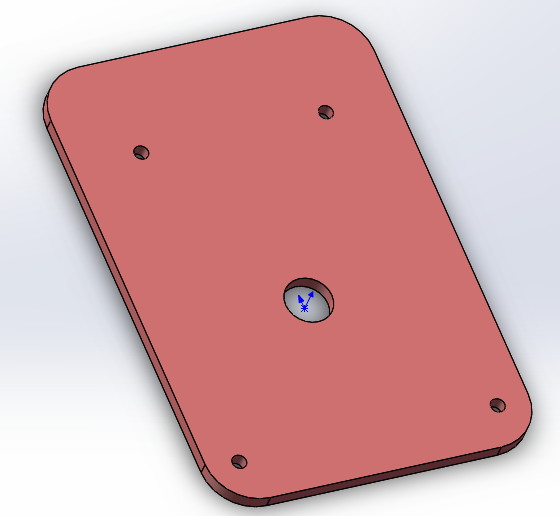
1. 激光雷達平臺(圖2所示)
這里的激光雷達平臺是專門放置和固定該激光雷達的,四個孔的設計分別和相應的激光雷固定孔位置保持一致即可,也很簡單。材料我們選擇加工性能良好且價格便宜的鋁合金(牌號6061)。本開源機器人采用的激光雷達是思嵐科技的LIDAR RPLIDAR-A1,原因只有一個:性能勉強能做室內SLAM且價格便宜(某寶上官網價格是582元)。
? ? ? ? ??
? ? ? ??
圖2 平臺及激光雷達(LIDAR RPLIDAR-A1)
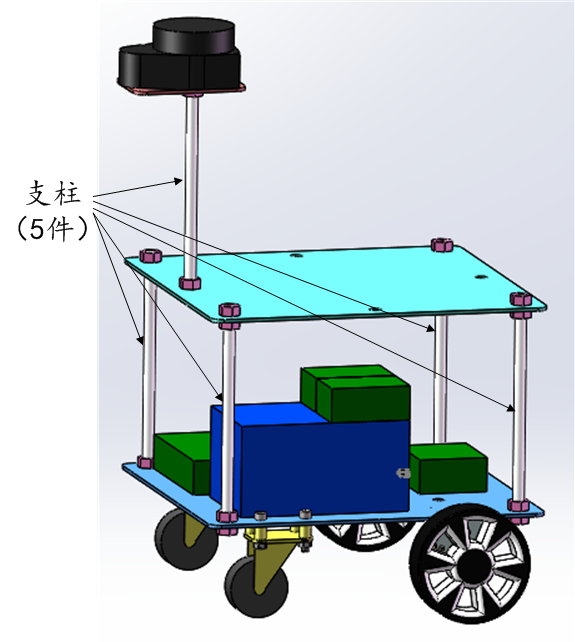
? 2. 支柱(圖3所示)
這里支柱用來連接上下兩層車體以及激光雷達平臺(圖3左),本來可以采用鋁桿進行設計和加工,但是為了降低成本要盡量減少機加工零件的數量,因此零件我們采用的方案是直接在某寶上購買現成的M10鋁合金螺桿(如圖3中),然后根據我們的需求截取相對應的長度,直接用購買的M10螺母(鋁合金材質,同店鋪購買即可)進行連接固定,連接固定的方式如圖3右所示。
 ? ? ? ? ? ? ?
? ? ? ? ? ? ? ? ? ? ? ? ? ?
? ? ? ? ? ? ?
圖3 支柱示意圖,鋁合金螺桿實物圖,支柱固定方式示意圖
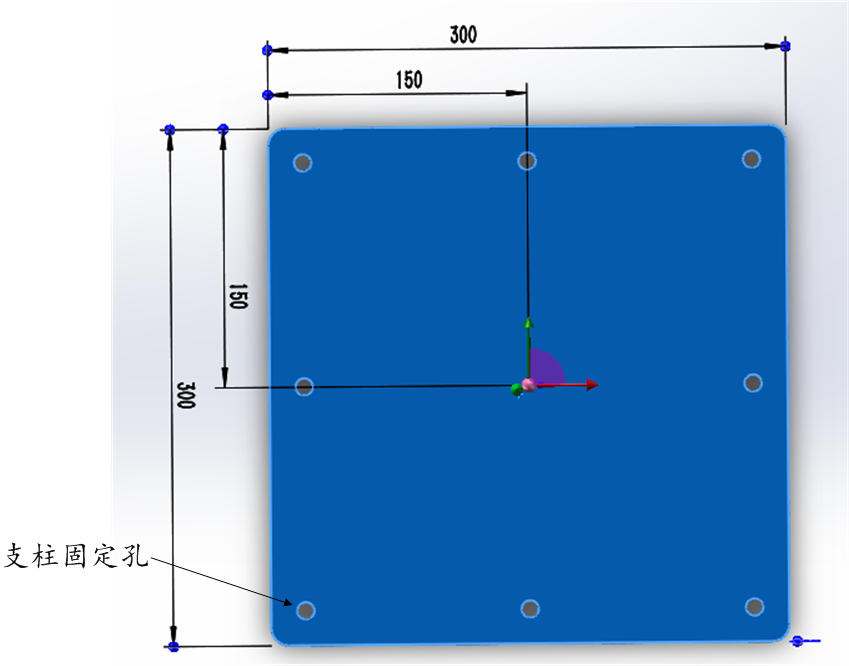
? 3. 上車體和 4. 車體(如圖4所示)
? 上車體(圖4左主要是用來放置上位機(筆記本電腦或者開發板)進行SLAM等相關實驗的,車體(圖4右)是用來放置底層的嵌入式硬件、電池等部件的,同時底面用來固定電機和主從動輪。這兩個零件是非標轉件需要機加工,因此為了降低加工成本采用加工性能良好且價格便宜的鋁合金(牌號6061),厚度也保持和激光雷達平臺一致(3mm,一致的材料有助于降低加工成本),且孔位置的設計也盡量保持共線或均布,有利于簡化加工工藝(加工工藝簡單同樣有助于降低加工成本)。 具體尺寸及圖紙參考本文開頭給出的下載鏈接,下載后可以看到詳細的加工圖紙。
? ? ? ? ? ? ? ??? ??
? ? ??? ??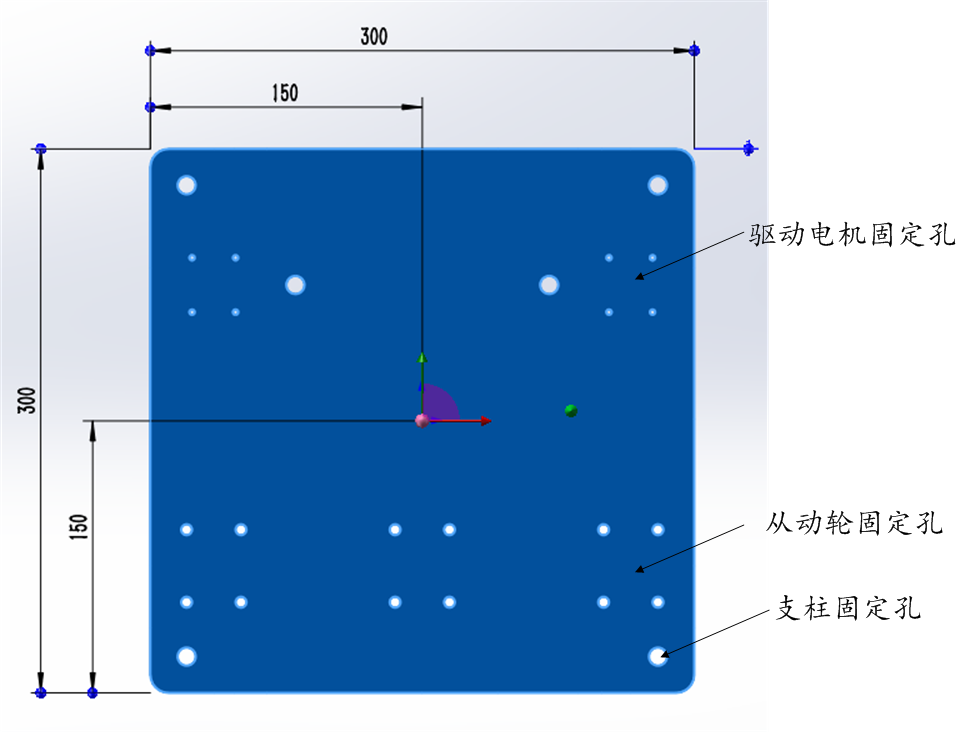
圖4 上車體和車體
? 5. 從動輪和 7. 主動輪(如圖5所示)
? 從動輪為萬向輪,尺寸為:2寸(大小可以不一樣,反正可以用墊圈調整高度),主動輪為實心橡膠承重輪(實心橡膠不會容易變形導致外徑變化),固定孔內徑為6mm,輪胎外徑為100mm,胎寬29mm,承重100Kg,注意購買時確認輪胎固定孔內徑的尺寸要和電機伸出軸外徑的尺寸一致。注意。從動輪和主動輪都是從某寶上購買,后面我會弄個表格附上購買店鋪和價格,避免廣告嫌疑就這里就不貼了。
? ? ? ? ? ? ? ? ? ? ? ? ?
? ? ? ? ? ? ? ? ? ? ? ?
圖5 從動輪實物圖和主動輪實物圖。
10. 電機的選型 和? 12. 電機支架(圖6所示)
首先列一下平臺的基本參數:
- 最大負載:5 Kg
一般筆記本電腦重量1Kg~3Kg(用筆記本充當SLAM上位機),安全系數為2,因此負載計為5Kg
- 機器人本體:10Kg
電池重3Kg,其余零部件(多為鋁材)合計2~3Kg,安全系數為2,因此本體記為10Kg
- 最高速度 0.5m/s
???????? 室內運行,速度不需要太快。
- 最小離地間距(越障能力):3 cm
???????? 室內平坦環境下使用,可以越過電線、地毯等障礙,最小離地間距3cm 足夠。因此選擇主動輪直徑D = 100 mm = 0.1 m。
- 連續運行10 h
???????? 盡量多的運行時間,方便后期調試,避免頻繁充電。
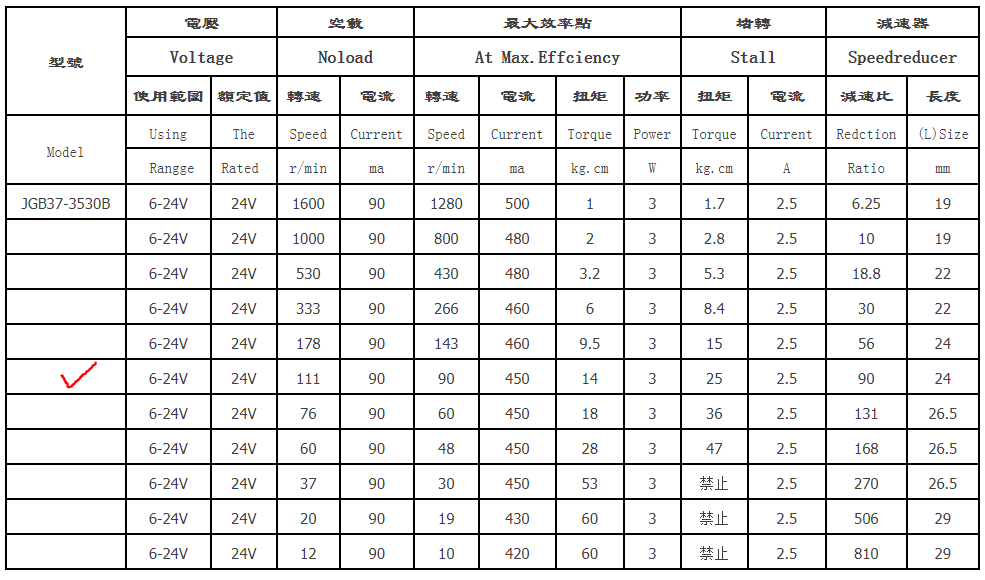
電機選型表
首先我們選擇的電機為ASLONG(金順來特)的JGB37-3530B系列電機(某寶上有專營店),選型參數表如上表所示,下面是選型計算的過程:
根據上面列的平臺參數表,平臺總質量 M = M1+M2 = 5Kg + 10Kg = 15Kg (其中,M1:最大負載;M2:本體重量)
故平臺總重力W為:W = Mg = 15 x 9.8 ≈ 150 N??
四個輪子,理論上每個輪子的分擔重量為37.5 N,對于兩個主動輪,考慮重量分布不均勻且預留一定安全余量,假設每個輪子單獨承擔的重量各為N = 50N,則電機扭矩T輪子運動時的關系為:
T = μ N R (其中,μ = 0.5為滾動摩擦系數;N = 50N為驅動輪承擔的重量;R = 0.05m為主動輪半徑;)
故:T = 0.5 x 50 x 0.05 = 1.25 N·m = 1.25/9.8 Kg力·100 cm = 12.755 Kg·cm
由于我們在重力負載以及重量分擔上已經留了安全余量,因此電機的扭矩選擇直接參考該數值就可以了。
? 已知平臺最高速度V = 0.5 m/s;電機最高轉速設為Rpm,則有:
Rpm =60x V/(2πR) = 60 x 0.5/(2x3.14x0.05) = 95.54 rpm
因此我們選擇的電機為上面電機選型表中打紅勾 √ 的型號,部分參數為:
- 最高轉速111 rpm(大于95.54 rpm)
- 扭矩為14 Kg·cm(大于12.755 Kg·cm)
- 堵轉轉矩為25 Kg·cm;
- 額定電壓 24 V
- 功率 3 W
- 減速比 90
- 帶磁編碼器(用于計量里程)
?
? ? ? ? ? ?
? ? ? ? ?
圖6 電機實物圖和電機支架實物圖
至此,我們本平臺的機械節后部分就介紹完了,可以看出,在能實現基本功能的前提下在結構上已經盡力簡化和,基本采用的都是現有的成品件,有利于降低平臺搭建的價格。其實由于方案過于簡單,這里的機械結構設計基本上沒什么技術含量,但是過程還是要有的。
下一篇博文開始介紹嵌入式硬件部分的搭建過程。
?
?<-- 本篇完 -->?
?
歡迎留言、私信、郵箱、微信等任何形式的技術交流。
作者信息:
名稱:Shawn
郵箱:zhanggx0102@163.com
微信二維碼:↓
? ? ? ? ??

)





)











