理解A*尋路算法具體過程
這兩天研究了下 A* 尋路算法, 主要學習了這篇文章, 但這篇翻譯得不是很好, 我花了很久才看明白文章中的各種指代. 特寫此篇博客用來總結, 并寫了尋路算法的代碼, 覺得有用的同學可以看看. 另外因為圖片制作起來比較麻煩, 所以我用的是原文里的圖片.
當然尋路算法不止 A* 這一種, 還有遞歸, 非遞歸, 廣度優先, 深度優先, 使用堆棧等等, 有興趣的可以研究研究~~
簡易地圖
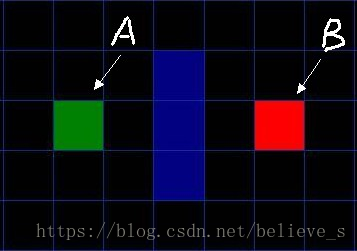
如圖所示簡易地圖, 其中綠色方塊的是起點 (用 A 表示), 中間藍色的是障礙物, 紅色的方塊 (用 B 表示) 是目的地. 為了可以用一個二維數組來表示地圖, 我們將地圖劃分成一個個的小方塊.
二維數組在游戲中的應用是很多的, 比如貪吃蛇和俄羅斯方塊基本原理就是移動方塊而已. 而大型游戲的地圖, 則是將各種”地貌”鋪在這樣的小方塊上.
尋路步驟
- 從起點A開始, 把它作為待處理的方格存入一個”開啟列表”, 開啟列表就是一個等待檢查方格的列表.
- 尋找起點A周圍可以到達的方格, 將它們放入”開啟列表”, 并設置它們的”父方格”為A.
- 從”開啟列表”中刪除起點 A, 并將起點 A 加入”關閉列表”, “關閉列表”中存放的都是不需要再次檢查的方格
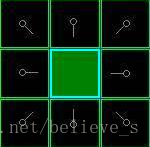
圖中淺綠色描邊的方塊表示已經加入 “開啟列表” 等待檢查. 淡藍色描邊的起點 A 表示已經放入 “關閉列表” , 它不需要再執行檢查.
從 “開啟列表” 中找出相對最靠譜的方塊, 什么是最靠譜? 它們通過公式 F=G+H 來計算.
F = G + H
G 表示從起點 A 移動到網格上指定方格的移動耗費 (可沿斜方向移動).
H 表示從指定的方格移動到終點 B 的預計耗費 (H 有很多計算方法, 這里我們設定只可以上下左右移動).
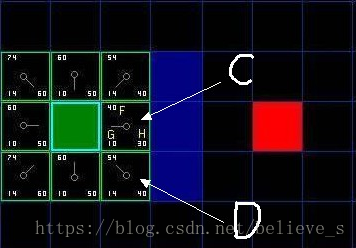
我們假設橫向移動一個格子的耗費為10, 為了便于計算, 沿斜方向移動一個格子耗費是14. 為了更直觀的展示如何運算 FGH, 圖中方塊的左上角數字表示 F, 左下角表示 G, 右下角表示 H. 看看是否跟你心里想的結果一樣?
從 “開啟列表” 中選擇 F 值最低的方格 C (綠色起始方塊 A 右邊的方塊), 然后對它進行如下處理:
- 把它從 “開啟列表” 中刪除, 并放到 “關閉列表” 中.
- 檢查它所有相鄰并且可以到達 (障礙物和 “關閉列表” 的方格都不考慮) 的方格. 如果這些方格還不在 “開啟列表” 里的話, 將它們加入 “開啟列表”, 計算這些方格的 G, H 和 F 值各是多少, 并設置它們的 “父方格” 為 C.
- 如果某個相鄰方格 D 已經在 “開啟列表” 里了, 檢查如果用新的路徑 (就是經過C 的路徑) 到達它的話, G值是否會更低一些, 如果新的G值更低, 那就把它的 “父方格” 改為目前選中的方格 C, 然后重新計算它的 F 值和 G 值 (H 值不需要重新計算, 因為對于每個方塊, H 值是不變的). 如果新的 G 值比較高, 就說明經過 C 再到達 D 不是一個明智的選擇, 因為它需要更遠的路, 這時我們什么也不做.
如圖, 我們選中了 C 因為它的 F 值最小, 我們把它從 “開啟列表” 中刪除, 并把它加入 “關閉列表”. 它右邊上下三個都是墻, 所以不考慮它們. 它左邊是起始方塊, 已經加入到 “關閉列表” 了, 也不考慮. 所以它周圍的候選方塊就只剩下 4 個. 讓我們來看看 C 下面的那個格子, 它目前的 G 是14, 如果通過 C 到達它的話, G將會是 10 + 10, 這比 14 要大, 因此我們什么也不做.
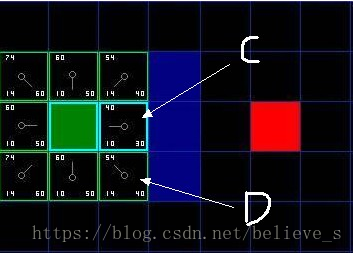
然后我們繼續從 “開啟列表” 中找出 F 值最小的, 但我們發現 C 上面的和下面的同時為 54, 這時怎么辦呢? 這時隨便取哪一個都行, 比如我們選擇了 C 下面的那個方塊 D.
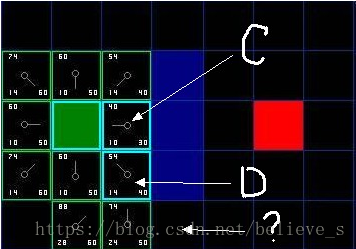
D 右邊已經右上方的都是墻, 所以不考慮, 但為什么右下角的沒有被加進 “開啟列表” 呢? 因為如果 C 下面的那塊也不可以走, 想要到達 C 右下角的方塊就需要從 “方塊的角” 走了, 在程序中設置是否允許這樣走. (圖中的示例不允許這樣走)
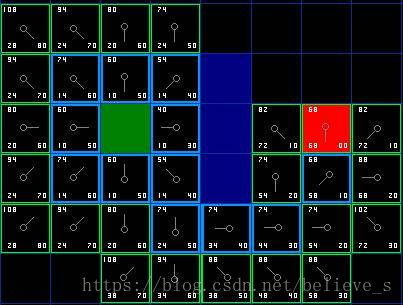
就這樣, 我們從 “開啟列表” 找出 F 值最小的, 將它從 “開啟列表” 中移掉, 添加到 “關閉列表”. 再繼續找出它周圍可以到達的方塊, 如此循環下去…
那么什么時候停止呢? —— 當我們發現 “開始列表” 里出現了目標終點方塊的時候, 說明路徑已經被找到.
如何找回路徑
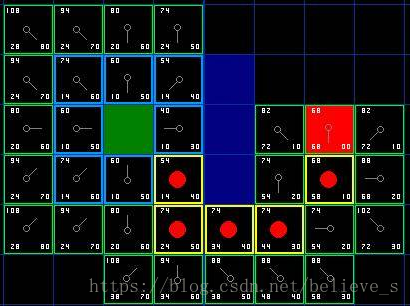
如上圖所示, 除了起始方塊, 每一個曾經或者現在還在 “開啟列表” 里的方塊, 它都有一個 “父方塊”, 通過 “父方塊” 可以索引到最初的 “起始方塊”, 這就是路徑.
將整個過程抽象
把起始格添加到 “開啟列表”
do
{
尋找開啟列表中F值最低的格子, 我們稱它為當前格.
把它切換到關閉列表.
對當前格相鄰的8格中的每一個
if (它不可通過 || 已經在 “關閉列表” 中)
{
什么也不做.
}
if (它不在開啟列表中)
{
把它添加進 “開啟列表”, 把當前格作為這一格的父節點, 計算這一格的 FGH
if (它已經在開啟列表中)
{
if (用G值為參考檢查新的路徑是否更好, 更低的G值意味著更好的路徑)
{
把這一格的父節點改成當前格, 并且重新計算這一格的 GF 值.
}
} while( 目標格已經在 “開啟列表”, 這時候路徑被找到)
如果開啟列表已經空了, 說明路徑不存在.
最后從目標格開始, 沿著每一格的父節點移動直到回到起始格, 這就是路徑.
主要代碼
程序中的 “開啟列表” 和 “關閉列表”
List<Point> CloseList;
List<Point> OpenList;Point 類
public class Point
{public Point ParentPoint { get; set; }public int F { get; set; } //F=G+Hpublic int G { get; set; }public int H { get; set; }public int X { get; set; }public int Y { get; set; }public Point(int x, int y){this.X = x;this.Y = y;}public void CalcF(){this.F = this.G + this.H;}
}尋路過程
public Point FindPath(Point start, Point end, bool IsIgnoreCorner)
{OpenList.Add(start);while (OpenList.Count != 0){//找出F值最小的點var tempStart = OpenList.MinPoint();OpenList.RemoveAt(0);CloseList.Add(tempStart);//找出它相鄰的點var surroundPoints = SurrroundPoints(tempStart, IsIgnoreCorner);foreach (Point point in surroundPoints){if (OpenList.Exists(point))//計算G值, 如果比原來的大, 就什么都不做, 否則設置它的父節點為當前點,并更新G和FFoundPoint(tempStart, point);else//如果它們不在開始列表里, 就加入, 并設置父節點,并計算GHFNotFoundPoint(tempStart, end, point);}if (OpenList.Get(end) != null)return OpenList.Get(end);}return OpenList.Get(end);
}完整代碼
maze.cs
using System;
using System.Collections.Generic;
using System.Linq;namespace Maze
{class Maze{public const int OBLIQUE = 14;public const int STEP = 10;public int[,] MazeArray { get; private set; }List<Point> CloseList;List<Point> OpenList;public Maze(int[,] maze){this.MazeArray = maze;OpenList = new List<Point>(MazeArray.Length);CloseList = new List<Point>(MazeArray.Length);}public Point FindPath(Point start, Point end, bool IsIgnoreCorner){OpenList.Add(start);while (OpenList.Count != 0){//找出F值最小的點var tempStart = OpenList.MinPoint();OpenList.RemoveAt(0);CloseList.Add(tempStart);//找出它相鄰的點var surroundPoints = SurrroundPoints(tempStart, IsIgnoreCorner);foreach (Point point in surroundPoints){if (OpenList.Exists(point))//計算G值, 如果比原來的大, 就什么都不做, 否則設置它的父節點為當前點,并更新G和FFoundPoint(tempStart, point);else//如果它們不在開始列表里, 就加入, 并設置父節點,并計算GHFNotFoundPoint(tempStart, end, point);}if (OpenList.Get(end) != null)return OpenList.Get(end);}return OpenList.Get(end);}private void FoundPoint(Point tempStart, Point point){var G = CalcG(tempStart, point);if (G < point.G){point.ParentPoint = tempStart;point.G = G;point.CalcF();}}private void NotFoundPoint(Point tempStart, Point end, Point point){point.ParentPoint = tempStart;point.G = CalcG(tempStart, point);point.H = CalcH(end, point);point.CalcF();OpenList.Add(point);}private int CalcG(Point start, Point point){int G = (Math.Abs(point.X - start.X) + Math.Abs(point.Y - start.Y)) == 2 ? STEP : OBLIQUE;int parentG = point.ParentPoint != null ? point.ParentPoint.G : 0;return G + parentG;}private int CalcH(Point end, Point point){int step = Math.Abs(point.X - end.X) + Math.Abs(point.Y - end.Y);return step * STEP;}//獲取某個點周圍可以到達的點public List<Point> SurrroundPoints(Point point, bool IsIgnoreCorner){var surroundPoints = new List<Point>(9);for(int x = point.X -1; x <= point.X+1;x++)for (int y = point.Y - 1; y <= point.Y + 1; y++){if (CanReach(point,x, y,IsIgnoreCorner))surroundPoints.Add(x, y);}return surroundPoints;}//在二維數組對應的位置不為障礙物private bool CanReach(int x, int y){return MazeArray[x, y] == 0;}public bool CanReach(Point start, int x, int y, bool IsIgnoreCorner){if (!CanReach(x, y) || CloseList.Exists(x, y))return false;else{if (Math.Abs(x - start.X) + Math.Abs(y - start.Y) == 1)return true;//如果是斜方向移動, 判斷是否 "拌腳"else{if (CanReach(Math.Abs(x - 1), y) && CanReach(x, Math.Abs(y - 1)))return true;elsereturn IsIgnoreCorner;}}}}//Point 類型public class Point{public Point ParentPoint { get; set; }public int F { get; set; } //F=G+Hpublic int G { get; set; }public int H { get; set; }public int X { get; set; }public int Y { get; set; }public Point(int x, int y){this.X = x;this.Y = y;}public void CalcF(){this.F = this.G + this.H;}}//對 List<Point> 的一些擴展方法public static class ListHelper{public static bool Exists(this List<Point> points, Point point){foreach (Point p in points)if ((p.X == point.X) && (p.Y == point.Y))return true;return false;}public static bool Exists(this List<Point> points, int x, int y){foreach (Point p in points)if ((p.X == x) && (p.Y == y))return true;return false;}public static Point MinPoint(this List<Point> points){points = points.OrderBy(p => p.F).ToList();return points[0];}public static void Add(this List<Point> points, int x, int y){Point point = new Point(x, y);points.Add(point);}public static Point Get(this List<Point> points, Point point){foreach (Point p in points)if ((p.X == point.X) && (p.Y == point.Y))return p;return null;}public static void Remove(this List<Point> points, int x, int y){foreach (Point point in points){if (point.X == x && point.Y == y)points.Remove(point);}}}
}
program.cs
using System;namespace Maze
{class Program{static void Main(string[] args){int[,] array = {{ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1},{ 1, 0, 0, 1, 1, 0, 1, 0, 0, 0, 0, 1},{ 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1},{ 1, 0, 0, 0, 0, 0, 1, 0, 0, 1, 1, 1},{ 1, 1, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1},{ 1, 1, 0, 1, 0, 0, 0, 0, 0, 0, 0, 1},{ 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 1},{ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1}};Maze maze = new Maze(array);Point start = new Point(1, 1);Point end = new Point(6, 10);var parent = maze.FindPath(start, end, false);Console.WriteLine("Print path:");while (parent != null){Console.WriteLine(parent.X + ", " + parent.Y);parent = parent.ParentPoint;}}}
}

)









)






