今日光電
? ? ? ?有人說,20世紀是電的世紀,21世紀是光的世紀;知光解電,再小的個體都可以被賦能。歡迎來到今日光電!

----與智者為伍 為創新賦能----
1.?章動定位算法實驗前,首先需要對光路進行調節,保證經過抖動振鏡和章動振鏡反射后的光束聚焦在單模光纖上。為了找到最佳耦合位置點,本文采用光柵式掃描尋找聚焦光斑的位置;確定好最佳耦合點后,對振鏡的兩軸分別輸入正弦和余弦電壓,使聚焦光斑沿這光纖端面做半徑為R0的圓周掃描運動。在光纖輸出端,采用光電探測器接收光信號,實現光信號到電信號的轉換。光電探測器的負載電阻為 RL,掃描后檢測到的最大輸出電壓為 Vmax,則最大光電流為:
 ? ? ? (1)
? ? ? (1)
根據響應度的定義,可以得到最大光電流下接收光功率表達式為:
 (2)
(2)
其中,R 為探測器的響應度。
假設信號光經過通信系統的精跟蹤子系統后,接收到的光斑發生了偏移,偏移后的光斑點為 A1,光斑橫向偏移量為 rb,如圖 4 所示。采用章動掃描后,光電探測器的輸出電壓值也會出現周期性變化。本算法的關鍵是尋找電壓最大值,如果已經找到掃描后的電壓最大值,就會得到進入到光電探測器內相應的光功率值。當通信系統接收到的光斑的能量為 Pi,利用式子(1)(2),計算得到的光功率的最大值為 Pmax,則耦合效率的計算公式可以表示為:
 ? ? ?(3)
? ? ?(3)
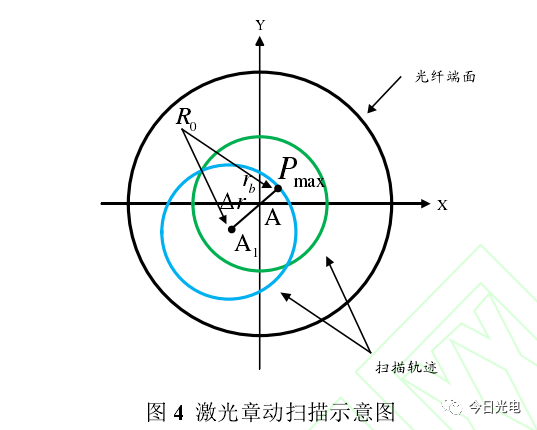
根據圖 4 中的幾何關系,可以得到光斑發生偏移的相對量為:
? ? ? ? ? ? ? (4)
(4)
在控制振鏡產生周期性掃描時,注意優化選取章動半徑,防止半徑過大使光斑移出接收端面外,產生其它誤差,降低光斑檢測精度。當檢測到探測器輸出電壓最大值時,記錄掃描到該點的時間,得到對應的坐標值,即
 ? ? ? ? ? ?(5)
? ? ? ? ? ?(5)
 ? ? ? ? ?(6)
? ? ? ? ?(6)
式中,w 為圓周運動的角速度,可表示為w = 2πft1為掃描的時間,f1為掃描時的頻率。當光斑發生? 角度偏轉時,光斑中心A1的相對脫靶量為:
? ? ? ? ? ? ? ? ? ? (7)
? ? ? ? ? ? ? (7)
? ? ? ? ? ? ? ? ? ?(8)
? ? ? ? ?(8)
? ? ? ? ? ? (9)
(9)
本文利用章動算法實現了光斑偏移量的計算,該算法最關鍵的是尋找每一個掃描周期時光電探測器的輸出最大電壓值。控制章動振鏡對經過章動掃描后計算出來的光斑坐標進行逐級補償,進一步優化章動掃描的半徑,提高光斑檢測精度和跟蹤精度。因此,對通信接收端的電路設計要求比較高,需要綜合考慮探測器的接收靈敏度和響應度。
2. 算法仿真為了驗證章動算法的可行性與跟蹤精度,本文采用 Matlab 進行仿真。在仿真時,預先使光斑發生已知偏移量,然后采用章動定位算法計算偏移后的坐標點,算出坐標點與原坐標的誤差值,觀察定位精度是否在可允許的范圍內,仿真條件如表 1 所示。
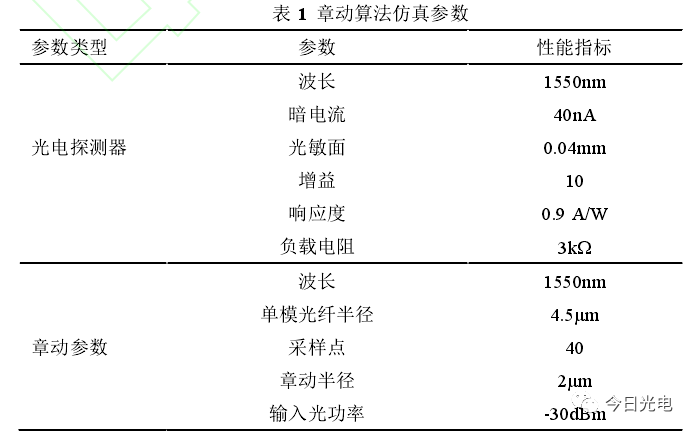
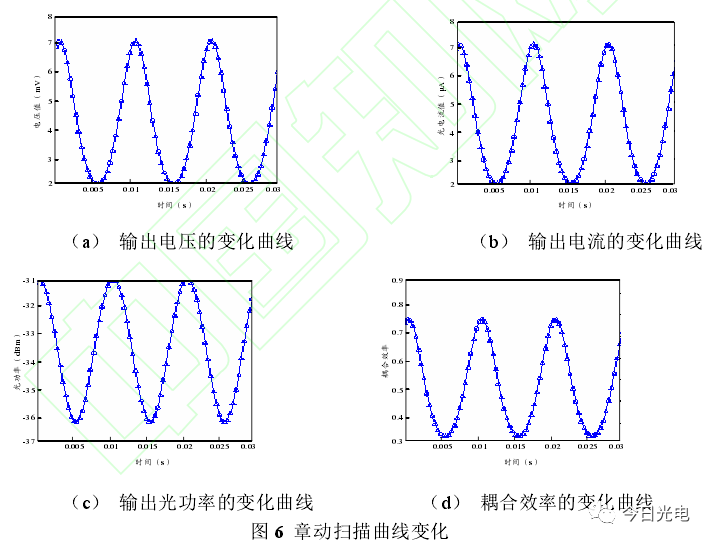
光電探測器選用濱松公司的 G8931-04 型雪崩光電二極管(APD),用于接收單模光纖輸出端的光信號。考慮到仿真結果的可行性,將光電探測器內的噪聲信號如暗電流噪聲、附加噪聲、散粒噪聲和熱噪聲也加入到仿真環境中,接收波長在 1550nm 波段,暗電流大小為 40nA,響應度為 0.9 A/W。為了方便章動定位算法計算,輸入光功率-30 dBm。單模光纖半徑為 4.5 μm,一個周期內的采樣點數為 40 個。章動半徑可根據耦合效率的損失量來選擇,本算法仿真時選用半徑為 2 μm 進行掃描。在實際應用時,需要綜合考慮通信信噪比和角度誤差要求來優化選取。仿真時,假設光斑偏移的后坐標為(2.5μm,1.5μm),一個章動周期內的采樣點數為 40個,掃描一個周期需要 10ms,掃描 3 個周期后分別尋找 3 個周期內電壓值的最大值,按照圖 5 的計算流程,得到計算后的光斑偏移量,仿真得到的曲線圖如圖 6 所示。圖 6(a)為掃描后的電壓值的變化曲線,在 3 個周期內,電壓值是呈現周期性變化的,其中最大值都為7.03mV。這也說明了章動定位掃描的穩定性是良好的。由于采用的接收探測器是 APD,雪崩增益為 10,利用式(1)可以得到相應的光電流值,變化曲線如圖 6(b)所示,可以看出光信號轉換后的光電流也呈現周期性變化。圖 6(c)為光功率的曲線變化,圖 6(d)為耦合效率的變化曲線。經過計算得到,耦合效率的最大值為 0.78。利用公式(3)的逆運算得到光斑橫向偏移量 rb為 0.915μm,計算后的光斑坐標為(2.482μm,1.525μm),與原坐標的
計算誤差在 0.02 μm 左右。
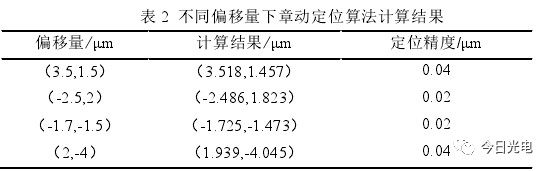
為了進一步驗證章動定位算法的精確度,另取 4 個坐標點,利用章動算法進行仿真,仿真結果如表 2 所示。可以看出,在不同偏移量下,采用章動算法計算得到的光斑定位精度在0.04μm,完全滿足通信系統對于光斑定位精度的要求。
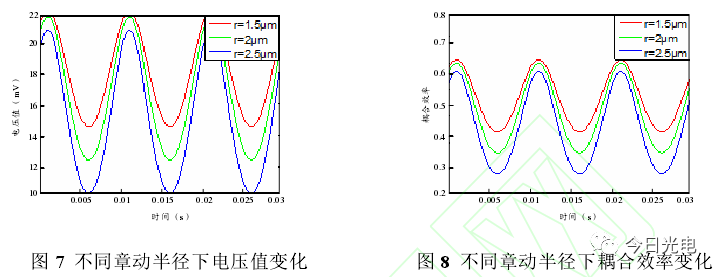
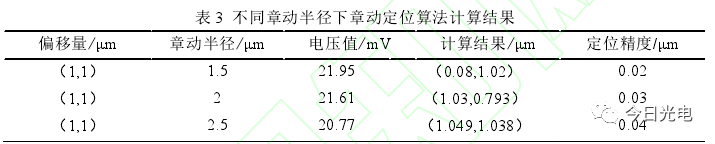
通過對式(5)和式(6)的分析,可以發現章動半徑的選擇決定了圓周掃描的路徑。如果選擇的章動半徑過大,會造成掃描時光斑移出單模光纖的接收端面。探測器接收到的光功率會出現不連續的現象,無法準確檢測光斑位置。對于章動半徑的選擇,需要根據檢測到的耦合效率的損失量來優化選取。本文在 Matlab 中仿真分析了選擇不同的章動半徑時,探測器輸出電壓值和耦合效率的變化情況如圖 7 和圖 8 所示。表 3 為不同章動半徑下所得到的定位結果。可以看出,章動半徑的選擇會影響光斑定位精度,當半徑取 1.5 μm 時,得到的光斑定位精度為 0.02 μm;隨著章動半徑的增大,其定位精度值也會變大。這是因為半徑的增大導致接收到的光功率降低,光斑信噪比下降造成定位精度值增大。
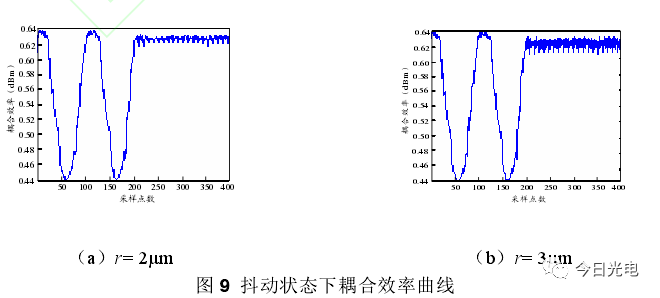
為了驗證系統對動態擾動下的光斑坐標計算精度,在抖動振鏡處引入了由 matlab 生產的符合正態分布的隨機信號,用來模擬光斑位置的隨機抖動現象。仿真時選用掃描半徑為 2μm、采樣點數為 100 個,進行章動掃描,得到抖動狀態下耦合效率曲線如圖 9(a)所示。圖中左側為開環狀態下引入隨機抖動信號后章動掃描得到的耦合效率曲線圖,其平均耦合效率為 54.24%。可以看出,在隨機抖動情況下,單模光纖的耦合效率變化比較大。在章動掃描后,按照圖 5 的章動算法流程圖,計算得到光斑坐標后,啟動閉環控制,通過優化章動掃描的半徑,使光斑在坐標點附近運動,耦合效率提高到 62.4%。圖 9(b)為掃描半徑為 3μm、采樣點數為 100 個時的耦合效率曲線圖,雖然閉環控制下耦合效率也在逐漸收斂,但由于掃描半徑過大,導致了耦合效率波動幅度過大的現象,抑制效果較差。
3. 總結寄語
激光通信系統由于大氣湍流、平臺振動等影響,使光斑出現偏移,降低光斑檢測精度。為了提高跟蹤精度,根據單模光纖耦合原理,采用以光電探測器為接收系統的激光章動定位算法。本文仿真分析了章動定位算法計算光斑的定位精度,提高了單模光纖的耦合效率。但同時也存在一些問題,比如該算法可以對靜態光斑橫線偏移、一定頻率內的動態干擾進行光斑檢測,提高光纖耦合效率,但一旦掃描半徑超出范圍后,會使耦合效率波動幅度過大,其抑制效果并不好;在周期掃描內采樣點數的增加會使系統的響應速度下降。在實際應用時,需要根據光斑脫靶量計算精度要求、單模光纖的耦合效率、系統的響應速度等綜合考量。
本文來源論文:基于光電探測器的激光章動定位算法——陳果

申明:原創不易希望大家積極點贊、轉發擴散。
?
----與智者為伍?為創新賦能----
【說明】歡迎企業和個人洽談合作,投稿發文。歡迎聯系我們誠招運營合伙人 ,對新媒體感興趣,對光電產業和行業感興趣。非常有意者通過以下方式聯我們!條件待遇面談

投稿丨合作丨咨詢
聯系郵箱:uestcwxd@126.com
QQ:493826566

歡迎關注以下公眾號了解光電測控相關







)

)





)



