本節書摘來異步社區《機器人學經典教程》一書中的第2章,第2.2節,作者:【美】Maja J. Matari?(馬婭?馬塔里奇),更多章節內容可以訪問云棲社區“異步社區”公眾號查看。
2.2 控制論
隨著控制理論的不斷發展和成熟,另一個與機器人相關的研究領域出現了。它開創于20世紀40年代,那時正是第二次世界大戰前后,Norbert Wiener開創了這個研究領域。Norbert Wiener本來在學習控制理論,他對原理的應用不局限于人工的范圍,而是擴展到了生物系統。
這個領域的研究被稱為控制論,它的研究范圍包括生物系統,研究層次包括了從神經元(神經細胞)到行為舉止等,并嘗試使用控制理論的方法在簡單的機器人上實現類似的效果。因此,控制論是一門研究機器、生命社會中控制和通信的一般規律的科學。
控制論將來自生物科學和神經學的理論和原理與工程學相結合,目的是找出關于生物和機器之間的異曲同工之處。正如我們將要看到的,W. GreyWalter所設計的“機械龜”就是這種方法的一個絕佳例子。
“控制論”這個詞匯起源于希臘語中的“kybernetes”,原意是指“領導者或者舵手”,這是瓦特根據風車原理所設計的蒸汽機中一個核心部件的名稱。按照控制論中的解釋,這個想法是機器會使用一個類似舵手的組件來實現自然界中舵手所能完成的復雜工作。
控制論中的一個重要概念就是機械或者有機體和所在環境之間的耦合、融合以及相互作用。這種相互作用必然是十分復雜的,正如我們所看到的一樣,很難用語言來給出一個正式的描述。然而,它是控制論的研究目標,同時也是機器人學中的一個重要組成部分。這也導致了“機械龜”的發展,按照我們在第 1 章給出的定義,“機械龜”是真正意義上的第一個機器人。
2.2.1 “機械龜”
William Grey Walter(1910~1977年)是一位富有革新精神的神經生理學家,他對大腦的工作方式極為感興趣。他對此取得了一些發現,包括人在不同睡眠階段中theta和delta腦電波的活躍程度。除了對神經科學的研究之外,他還致力于對大腦功能的研究,而這些研究是通過讓機器來模仿動物的行為來實現的。
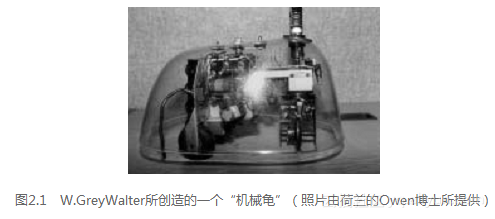
如今,我們把那些具有與生物系統相類似屬性的機器稱為“仿生”,這意味著它們在以某種方式在模仿生物系統。在20世紀40年代,William Grey Walter從事了大量的研究,并在之后創造了多種設計巧妙的機器,他將這些機器稱作“機器龜” 或者 “機械烏龜”。這個名字出自Lewis Carroll的作品《愛麗絲夢游仙境》中的一個“烏龜”角色,William Grey Walter的機器人就具備了這些仿生行為。其中最為出名是Elmer 和Elsie,這兩個名字分別是機電機器和光學敏感的縮寫。“機器龜”采用了與三輪車相類似的設計,內置有3個車輪,其中前輪用于控制方向,兩個后輪用來驅動。它們的外表覆蓋著透明的塑料外殼,使它們看起來顯得栩栩如生,至少對于一個抱著友好和包容的觀察者來說是這樣。圖2.1中給出了其中一個“機器龜”的樣子。
W. Grey Walter(很少使用他的完整名字William Grey Walter)根據他的“機器龜”們的行為屬性來為它們以拉丁語命名,例如Machina Speculatrix和Machina Docilis。Machina Speculatrix的意思是“會思考的機器”或者“思考”,而Machina Docilis的意思是“可以被馴服或者訓練的機器”,按照W. Grey Walter的思路,這些機器能夠進行學習,因為人們可以使用哨子來訓練這些機器。
接下來,我們來看看Machina Speculatrix所包含的各個部分。
一個光學傳感器,用來檢測光線的強度(我們將在第8章中對這種類型的傳感器進行詳細的介紹)。
一個碰撞傳感器,用來檢測和物體的接觸(我們將在第8章中對這種類型的傳感器進行詳細的介紹)。
一個可以重復充電的電池。
3個電機,每個電機為一個車輪提供動力(我們將在第4章中學習到電機和其他的一些執行器)。
3個輪子(我們將在第4章中學習到車輪和其他效應器)。
一個使用了雙真空管的模擬電子電路(非常古老的技術),這個電路充當了機器人的大腦,用來連接傳感器和車輪。模擬信號指的是一個在時間和幅度(波振蕩的量)上都連續的信號;模擬電路產生的就是模擬信號。
通過這些簡單的組件,Grey Walter賦予了Machina Speculatrix如下的行為或者能力。
尋找光亮。
調整方向,使頭部朝向光亮。
遠離光線運動。
通過轉向或者推動來避免障礙。
為電池再次充電。
正如我們將要看到的一樣,Grey Walter所創造的這臺和其他的機器人都使用反應型控制(reactive control)。一種控制機器人的方式就是使用具有優先級別的“反應”集合。當這些簡單的反應規則被正確地排列組合之后,表現出來的行為就如同動物一樣了。我們將會重新在第14章更詳細地對反應型控制進行學習,以了解是什么使得機器人具備了“機器龜”相似的屬性(除了那個海龜特有的龜殼)。
“機器龜”在沒有被編程的前提下,可以表現出各種復雜的行為模式,這種現象被我們稱為應急行為(emergent behavior),這部分內容將在第18章詳細介紹。最重要的是,它們都是模仿動物行為的絕佳例子,可以使用非常簡單的人工機制來實現現實中的行為。
Grey Walter認為可以通過機器人學和人工智能(AI)技術的結合來制造出智力和動物相當的機器。但是,在Grey Walter所在的時代,這兩種技術還不存在。而作為兩者結合的控制論,在Grey Walter和其他一些杰出人物(比如我們之前提過的Norbert Weiner)的影響下產生了。
控制論有效地結合了“思維”“行動”與環境的相互作用。正如我們將要看到的,這些機器人學的基本組成部分一度被按照人工智能和機器人學兩個領域進行拆分,人工智能主要負責研究機器人的思維,而機器人學主要研究在物理世界中的行動。這種孤立的研究方式,隔離了兩個研究領域,這對于取得機器人研究的進步是十分不利的。與此不同的是,控制論的研究更為全面。機器人學曾經在那條彎路走了很久才回到正確的研究道路上。
有趣的是,Grey Walter的“機器龜”也是現在的一些被稱為人工生命的最早的實例代表,人工生命是機器人相關的一個研究領域,不過研究重點在于計算,而不是物理世界的,這些人工生命存在于計算機中,而不是在真實的世界。
Grey Walter在他的一生中,帶著他所創造的機器人在世界各地進行展覽,直到今天我們還可以在博物館中看到這些機器人。有趣的是,這些滅絕的機器人(例如Grey Walter的作品)被保存的狀況要遠遠好于任何自然界中已經滅絕的物種。在20世紀90年代,一個“機器龜”被發現(當然是在一所房子中,而不是在野外自由地活動)。這個“機器龜”并沒有給人簽名,也沒有召開記者招待會,不過它的出現的確再次激起了人們對機器人的熱情。
2.2.2 Braitenberg的“車型機器人”
很多人都了受到Grey Walter創造機器人的影響,其中一位就是Braitenberg(見圖2.2),他由此產生了創作靈感,并于 1984 年編寫了一本名為《車型機器人》的書。這本書中描述了一系列的想法,或者說是思維實驗,或者說是想象實驗(原文的gedanken出自德語,意為思想),書中展示了如何設計一個簡單的機器人(他稱其為“車型機器人”),并讓它們產生了非常類似動物和生命的行為。這本書成為了一個機器人研究人員的靈感來源,雖然Braitenberg本人并沒有按照他的描述創造出任何實際的機器人或者“車型機器人”。

Braitenberg的“車型機器人”最初只包含了一個電機和一個光學傳感器,隨著逐步發展,“車型機器人”包含了更多的電機和更多的傳感器,而且它們之間的聯系也變得更加有趣起來,當然這一切都是通過模擬電子電路實現的。傳感器與電機直接連在一起,因此傳感的輸入可以實現電機的驅動。例如,光學傳感器可以直接連接到車輪,所以光線越強,機器人運動得就越快,看起來就像這些機器人受到光的吸引一樣,在拉丁語中被稱為“photophilic”,字面上的意思就是“喜光”。此外,在一些“車型機器人”中,這種關系被顛倒了,光線越強,機器人運動得越慢,好像它們對光感到恐懼,或者是被光所擊敗,在拉丁語中被稱為“photophobic”,字面上的意思是“恐光”。
傳感器和電機之間存在的這個傳感信號越強,電機輸出就越強的聯系通常被稱作興奮性連接,這是因為輸入信號刺激了輸出信號。相反,如果傳感器的信號越強,而電機輸出就越弱,這種聯系被稱為抑制性連接,這是因為輸入信號抑制了輸出信號。這種連接的思路來自于生物學,它與生物體中的通過興奮性和抑制性相互連接的神經元十分相似(當然結構還簡單得多)。通過改變它們之間的連接和影響強度(就如同大腦中的神經元一樣),就可以產生眾多的行為結果,例如尋覓光或者躲避光,就如同Grey Walter的“機器龜”一樣,甚至像攻擊和愛等復雜的社會行為。
Braitenberg的書中介紹了如何使用簡單的機制保存信息,建立記憶,甚至去完成機器人的學習。它的一些簡單的設計已經被一些機器人愛好者和初學者們(可能就如同你一樣)實現了,這也為建造更為先進的機器人提供了靈感。如同Grey Walter的“機器龜”一樣,Braitenberg 的“車型機器人”也是一個反應式機器人。我們將會在第14章中學到更多的關于它們的內容。
控制論研究的范圍是機器人的行為以及它們與環境之間的互動,新興的人工智能領域研究的重點在于智能——自然的(開玩笑的,當然不是“自然”的,而是“人工”的)。




 (第1卷)》——1.6節虛擬交換系統)



)
)







)

![JS Ajax異步請求發送列表數據后面多了[]](http://pic.xiahunao.cn/JS Ajax異步請求發送列表數據后面多了[])