文章目錄
- 1 背景
- 2 方法
- 2.1 數據來源
- 2.2 碰撞數據
- 3 碰撞事件分析
- 4 討論
1 背景
??這篇文章是講waymo道路安全性能數據分析的,主要想表達的是waymo自動駕駛系統在安全上面的出色表現,以向政府、大眾提高自己產品的公信力。
??這篇文章分析的數據是自從2019年到2020年累積的,610萬英里的自動駕駛里程,其中還包含65000英里的全無人駕駛里程。在這些里程下,waymo實際發生了18次道路真實碰撞事件,以及29起接管后仿真復現的29起碰撞事件,合計47次碰撞。那本文也是拿這47次碰撞去分析的waymo自動駕駛安全的。
??接下來詳細介紹一下各部分的內容。
2 方法
2.1 數據來源
??數據來源如背景部分提到,包含兩個:
- 全無人自動駕駛:駕駛位無人情況下,從2019年1月到2020年9月,累計65000英里
- 操作員自動駕駛:駕駛位有人看守下,2019全年累計610萬英里
2.2 碰撞數據
??在這篇文章中,waymo對碰撞的定義是,自動駕駛汽車與其他物體間有接觸。也就是說這其中是包含行人非機動車什么的主動撞上自動駕駛汽車的事件
??當然,在有操作員的汽車內,當遇到危險時,為了避免發生碰撞,操作員會接管汽車。因此在道路上的會有潛在的碰撞事件由于接管而無法觀測到,這個時候需要仿真介入。waymo使用的方法是,用當時路上測試的自動駕駛算法版本,復現當時的道路場景,去看如果不接管,車繼續開會不會撞上,以此來召回碰撞事件。
??值得一提的是,在仿真場景中,由于社會車輛的行為是與當時路上的自動駕駛汽車交互的,在仿真環境中,障礙物的行為可能會失真。因此waymo對社會車輛進行了建模。雖然在長時間內對代理行為進行建模非常具有挑戰性,但是在接管后的短時間內,理解合理的沖突&避免碰撞的行為是可行的。waymo使用人類避碰行為模型來建模社會車輛的短期反應(這篇論文是建模方法的一部分)。
3 碰撞事件分析
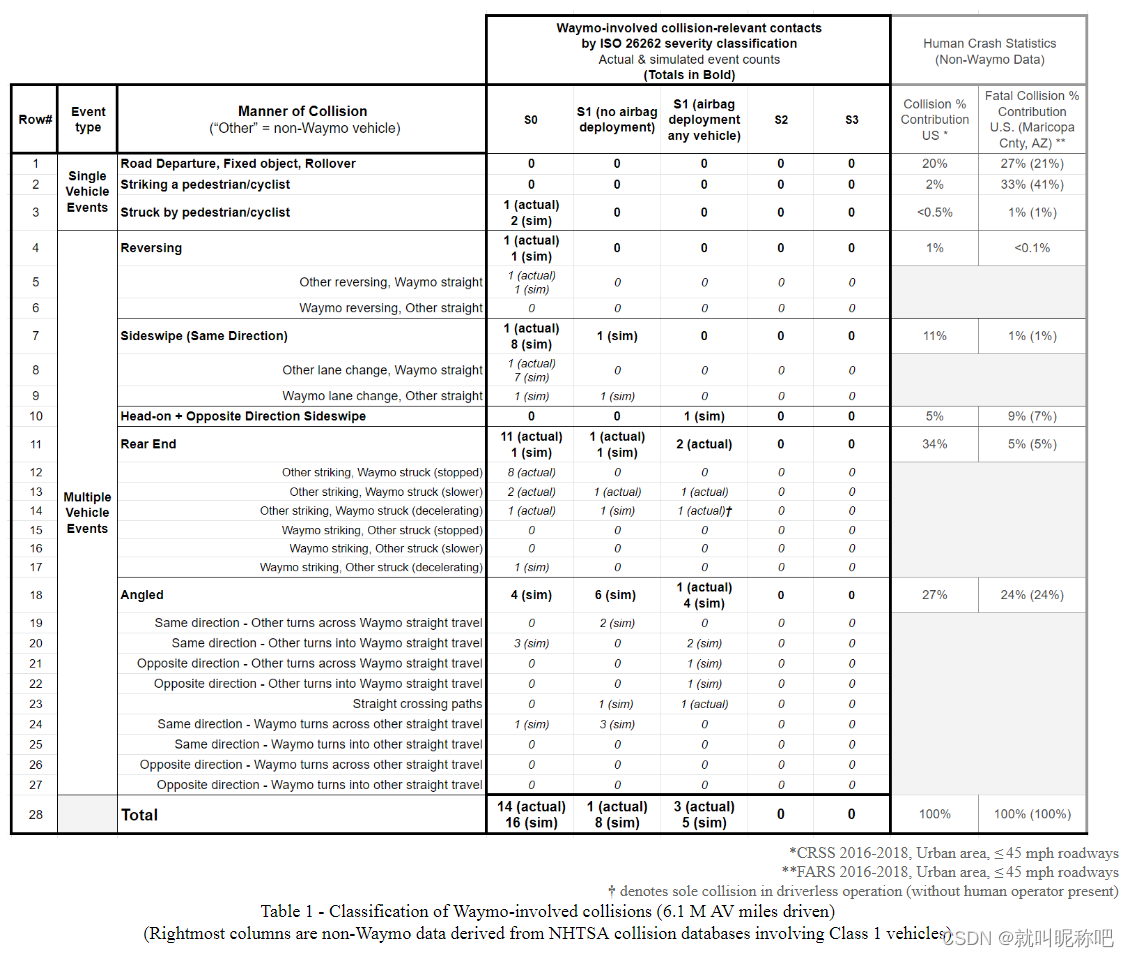
??得到真實的&仿真召回的碰撞事件后,waymo對碰撞進行了分類。分類方法自然是通過碰撞的嚴重程度劃分,如下圖所示,這是一個總的圖。左側一級的分類是是否和機動車碰撞,第二級分類代表碰撞的類型,比如非機動車碰撞里會和行人、路肩等碰撞;機動車碰撞里會有追尾,側刮等不同類型的分類。
??碰撞的嚴重性是根據ISO 26262標準來分的:
- S0:無受傷
- S1:輕微至中度受傷
- S2:嚴重到危及生命(有概率存活)
- S3:危及生命(不確定存活)至死亡
waymo通過AIS傷害等級,將具體的碰撞事件劃分到以上的4個類別中。例如S1代表至少10%的概率造成AIS1或以上的AIS等級的碰撞事件。waymo具體是通過速度變化和受力方向去評估傷害等級的。同時,為了提供有關更多S1級別事件嚴重性的信息,waymo將S1根據是否導致任何相關車輛實際/模擬展開安全氣囊分成了兩列。
??表格的最右側是人類的碰撞統計。
??可以看到waymo的駕駛中是沒有出現S2和S3的,表明他們很安全,這也是建立公信力需要有的表現。
4 討論
??本文得出的一些結論,總體上就是說waymo的安全性很高~~:
- 610萬英里發生47起碰撞
- 16起追尾碰撞事件中,有8起涉及waymo在停車或逐漸減速時被撞,還有2起在勻速行駛時被撞,另外5起追尾的特點是,其他車輛對waymo自動駕駛汽車轉彎時的減速行為反應不足
- Angled碰撞,15起,多發生在獅子路口,涉及車輛過路或轉彎。其中11起特點是另一輛車沒有適當地讓出路權,另外4起是waymo右轉時,社會車輛試圖超車
- 10起測刮事件,有8個涉及社會車變道進入waymo停止的地方。
- 所有的非機動車碰撞傷害程度都是無傷
- 2起倒車事件涉及社會車低速撞到waymo車輛側面
- 1起正面碰撞發生在夜間,社會車行駛方向錯誤
文章后面就是講一些報告性的內容,關于局限性、未來的工作、waymo在做的事情等,干貨不多,這篇論文內容還是較少的


事務的并發問題和隔離級別)






(7.1) 使用航點和事件規劃任務)
 重放)








