文章目錄
- 4、多層感知機( MLP)
- 4.1、多層感知機
- 4.1.1、隱層
- 4.1.2、激活函數 σ
- 4.2、從零實現多層感知機
- 4.3、簡單實現多層感知機
- 4.4、模型選擇、欠擬合、過擬合
- 4.5、權重衰退
- 4.6、丟失法|暫退法(Dropout)
- 4.6.1、dropout 函數實現
- 4.6.2、簡潔實現
- 4.7、數值穩定性
4、多層感知機( MLP)
4.1、多層感知機
加入一個或多個隱藏層+激活函數來克服線性模型的限制, 使其能處理更普遍的函數關系類型,這種架構通常稱為多層感知機(multilayer perceptron)。
輸入層不涉及任何計算,因此使用此網絡產生輸出只需要實現隱藏層和輸出層的計算。

4.1.1、隱層
通用近似定理
多層感知機可以通過隱藏神經元,捕捉到輸入之間復雜的相互作用, 這些神經元依賴于每個輸入的值。多層感知機是通用近似器, 即使是網絡只有一個隱藏層,給定足夠的神經元和正確的權重, 可以對任意函數建模。
通過使用更深(而不是更廣)的網絡,可以更容易地逼近許多函數。
4.1.2、激活函數 σ
激活函數(activation function)通過計算加權和并加上偏置來確定神經元是否應該被激活,換句話說,激活函數的目的是引入非線性變化。
常見激活函數
ReLU 是絕大多數情況的選擇。原因是它計算簡單,不用跑指數運算,CPU跑指數運算是很費時間的,GPU會好一些。
1)ReLU
R e L U ( x ) = m a x ( x , 0 ) ReLU(x) = max(x,0) ReLU(x)=max(x,0)
使用 ReLU 的原因是,它求導表現得特別好:要么讓參數消失,要么讓參數通過。 這使得優化表現得更好,并且ReLU減輕了困擾以往神經網絡的梯度消失問題目前還不理解,為什么這樣優化表現更好?
2)Sigmoid
s i g m o i d ( x ) = 1 1 + e ? x sigmoid(x) = \frac{1}{1+e^{-x}} sigmoid(x)=1+e?x1?
它將范圍(-inf, inf)中的任意輸入壓縮到區間(0, 1)中的某個值。
3)tanh
t a n h ( x ) = 1 ? e ? 2 x 1 + e ? 2 x tanh(x) = \frac{1-e^{-2x}}{1+e^{-2x}} tanh(x)=1+e?2x1?e?2x?
將其輸入壓縮轉換到區間(-1, 1)上。
為什么要引入非線性變換?
非線性變換比線性變換有更強的表達能力。可逼近任意復雜函數,更加貼合真實世界問題,現實世界中單調、線性是極少存在的。
例如,如果我們試圖預測一個人是否會償還貸款。 我們可以認為,在其他條件不變的情況下, 收入較高的申請人比收入較低的申請人更有可能償還貸款。 但是,雖然收入與還款概率存在單調性,但它們不是線性相關的。 收入從0增加到5萬,可能比從100萬增加到105萬帶來更大的還款可能性。 處理這一問題的一種方法是對我們的數據進行預處理, 使線性變得更合理,如使用收入的對數作為我們的特征。(該例來自 DIVE INTO DEEP LEARNING)
softmax 函數與隱層激活函數的區別?
softmax 函數主要用于輸出層,而不是隱藏層。隱藏層的激活函數通常是為了引入非線性,而 softmax 函數則是為了將得分映射為概率,用于多分類問題的輸出。
什么是層數塌陷?
梯度消失。
4.2、從零實現多層感知機
(損失函數、優化算法 來自 torch)
import torch
from torch import nn
from d2l import torch as d2lbatch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
初始化模型參數
num_inputs, num_outputs, num_hiddens = 784, 10, 256
#生成了一個服從標準正態分布(均值為0,方差為1)的隨機張量 大小(num_inputs, num_hiddens),作為 w 初始值。
W1 = nn.Parameter(torch.randn(num_inputs, num_hiddens, requires_grad=True) * 0.01)
b1 = nn.Parameter(torch.zeros(num_hiddens, requires_grad=True))
# 大小為(num_hiddens,)的零張量 ,作為 b 的初始值
W2 = nn.Parameter(torch.randn(num_hiddens, num_outputs, requires_grad=True) * 0.01)
b2 = nn.Parameter(torch.zeros(num_outputs, requires_grad=True))params = [W1, b1, W2, b2]
權重為什么要乘 0.01?
乘以0.01的目的是將初始權重縮放到一個較小的范圍,以便更好地初始化網絡。
激活函數
def relu(X):# 創建了一個與輸入張量X具有相同形狀的全零張量aa = torch.zeros_like(X)return torch.max(X, a)
定義模型
def net(X):# -1 表示該維度將根據張量的大小自動計算, 如:784, reshape(-1,28) 會得到28*28X = X.reshape((-1, num_inputs))H = relu(X@W1 + b1) # 這里“@”代表矩陣乘法return (H@W2 + b2)
損失函數
# reduction='none':表示不進行降維,張量的形狀通常與輸入的標簽張量的形狀相同。
loss = nn.CrossEntropyLoss(reduction='none')
訓練 & 優化算法
num_epochs, lr = 10, 0.1
updater = torch.optim.SGD(params, lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, updater)
評估
d2l.predict_ch3(net, test_iter)
4.3、簡單實現多層感知機
import torch
from torch import nn
from d2l import torch as d2l
net = nn.Sequential(nn.Flatten(),nn.Linear(784, 256),nn.ReLU(),nn.Linear(256, 10))def init_weights(m):if type(m) == nn.Linear:nn.init.normal_(m.weight, std=0.01)net.apply(init_weights);
batch_size, lr, num_epochs = 256, 0.1, 10
loss = nn.CrossEntropyLoss(reduction='none')
trainer = torch.optim.SGD(net.parameters(), lr=lr)train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
4.4、模型選擇、欠擬合、過擬合
模型選擇
DL 的核心是,設計一個大的模型,控制它的容量,盡可能地降低泛化誤差。
泛化誤差(test_loss):模型在新數據上的誤差。
訓練誤差(train_loss):模型在訓練數據上的誤差,反映了模型在訓練數據上的擬合程度。
模型訓練過程中用到的損失是 train_loss 。
測試集:只用一次的數據集【如競賽提交后才進行測試的無法用于調超參數的不可知數據】。
驗證集:用來評估模型好壞的數據集,根據結果調整超參數。
小數據集上做驗證,通常使用K-則交叉驗證,常用k=5或10。
X_train, X_test, y_train, y_test = train_test_split(X,y,test_size=0.2,random_state=42)這種分割之后,哪里涉及到驗證損失?繪制出來的 test_loss 算測試損失還是驗證損失?沐神提到過,數據集分割中的X_test,y_text 是當作測試集實際上是驗證集(val),不代表模型在新數據上真實泛化能力。
對上方紅字,我的理解:數據集分割的test,在使用時確實是當測試集對待的,對代碼來說他就是測試集,但是在代碼之外,往往會根據這個結果人為地去調整下學習率、隱層節點之類的超參數,那么就更加貼合驗證集的定義,是實際中的驗證集。
所以翻閱書籍看到 test 就應該啊理解為測試集,不要鉆牛角尖說事實上我壓根就沒有測試集,到我手上了的都成為驗證集了,因為我后續會調參,薛定諤的貓。所以書籍教程上談 test為測試集,沒有任何問題(一直糾結很久,所以記錄一下)。
超參數:訓練前預定義好的,訓練中不會變,(lr、epoch、batchsize、正則化參數、隱層節點數)。
參數:權重w、偏移量b之類的。
過擬合&欠擬合
-
低容量配簡單數據時,高容量模型配復雜數據時,擬合正常。
-
高容量模型數據少,容易過擬合;低容量模型數據復雜,易欠擬合。
模型容量
擬合各種函數的能力,高容量的模型可以記住所有訓練數據。
如何估計模型容量?
- 參數個數
- 參數值的選擇范圍
VC維(Wapnik-Chervonenkis dimension)是統計學提供的量化模型容量的方法,提供一個為什么一個模型好的理論依據。在DL中使用VC維很困難。

(圖片來自 《DIVE INTO DEEP LEARNING》)
數據復雜度
樣本數、沒樣本元素數、時空結構、多樣性。
更多的,模型容量和數據復雜度是直觀感受,不斷積累調參得來的感受。
4.5、權重衰退
權重衰減是最廣泛使用的正則化的技術之一, 它通常也被稱為 L 2 正則化 L_2正則化 L2?正則化。
正則化是處理過擬合常用方法,在訓練集損失函數中加入懲罰項,以降低模型復雜度。保持模型簡單的一個特別的選擇是使用 L 2 懲罰 L_2懲罰 L2?懲罰的權重衰減。
常見的正則化方法:
- L1 正則化(L1 Regularization):在損失函數中添加參數的絕對值之和,即 L1 范數。這將導致一些參數變為零,從而實現特征選擇的效果,使得模型更稀疏。
- L2 正則化(L2 Regularization):在損失函數中添加參數的平方和的一半,即 L2 范數。這會使模型的參數更加平滑,防止參數過大,從而減輕過擬合。
- Elastic Net 正則化:結合了 L1 和 L2 正則化,同時對參數施加 L1 和 L2 懲罰項。
- Dropout 正則化:在訓練過程中,隨機地將一些神經元的輸出設置為零,以降低神經網絡的復雜性。
- 數據增強(Data Augmentation):通過對訓練數據進行一系列隨機變換(如翻轉、旋轉、縮放等),增加數據樣本,從而提高模型的泛化能力。
參數更新法則
計算梯度
? ? w ( L ( w , b ) + λ 2 ∣ ∣ w ∣ ∣ 2 ) = ? L ( w , b ) ? w + λ w \frac{?}{?w}(L(w,b) + \frac{λ}{2}||w||^2) = \frac{?L(w,b)}{?w} + \lambda w ?w??(L(w,b)+2λ?∣∣w∣∣2)=?w?L(w,b)?+λw
更新參數(時間t)
w t + 1 = ( 1 ? η λ ) w t ? η ? L ( w , b ) ? w wt+1 =(1-ηλ)wt - η\frac{?L(w,b)}{?w} wt+1=(1?ηλ)wt?η?w?L(w,b)?
通常 η λ < 1 η\lambda < 1 ηλ<1,深度學習中這個就叫做權重衰減。
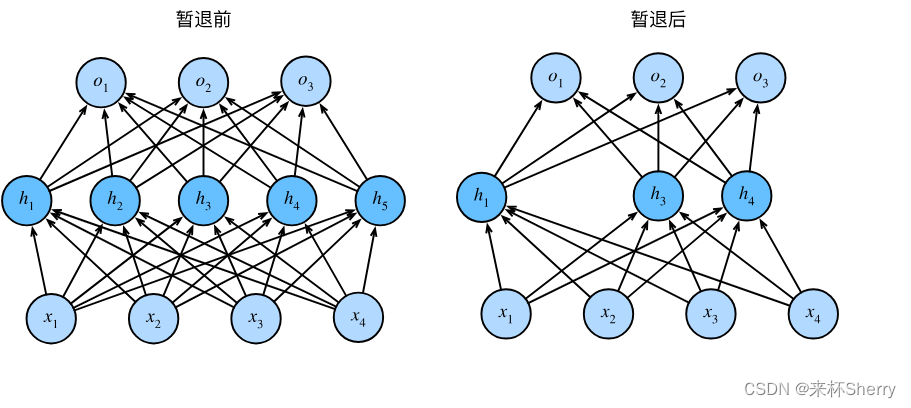
4.6、丟失法|暫退法(Dropout)
Dropout 是一種常用的正則化技術,正則技術就是用于防止神經網絡過擬合。
丟棄法將一些輸出項隨機置0來控制模型復雜度,常作用在多層感知機的隱藏層輸出上,丟棄概率是控制模型復雜度的超參數。
常用 dropout rate = 0.5 or 0.9 or 0.1
無偏差的加入噪音
對 x x x加入噪音得到 x ′ x' x′,我們希望
E [ x ′ ] = x E[x'] = x E[x′]=x
丟棄法對每個元素進行如下擾動
x i ′ = { 0 with?probability?p x i 1 ? p otherise x_i' = \begin{cases} 0& \text{with probability p} \\ \frac{x_i}{1-p} &\text{otherise} \end{cases} xi′?={01?pxi???with?probability?potherise?
怎么能看出"加噪音"這個動作,這不是"丟棄"動作嗎?
理論上 dropout 是在做一個隱層之間加噪音的操作,實際上是通過上述 x x x轉 x ′ x' x′實現的。
丟棄法的實際使用
通常將丟棄法作用于隱層的輸出上。
[hidden layers]
? ↓
[dropout layer]
? ↓
[output layer]
h = σ ( W 1 x + b 1 ) h = σ(W_1x + b_1) h=σ(W1?x+b1?)
h ′ = d r o p o u t ( h ) h' = dropout(h) h′=dropout(h)
o = W 2 h ′ + b 2 o = W_2h' + b_2 o=W2?h′+b2?
y = s o f t m a x ( o ) y = softmax(o) y=softmax(o)
(圖片來自 《DIVE INTO DEEP LEARNING》)
4.6.1、dropout 函數實現
import torch
from torch import nn
from d2l import torch as d2ldef dropout_layer(X,dropout):#dropout只有在合理范圍內,斷言允許繼續執行assert 0 <= dropout <= 1# dropout =1 分母無意義if dropout ==1:return torch.zeros_like(X)if dropout == 0:return Xmask = (torch.rand(X.shape) > dropout ).float()return mask * X / (1.0 - dropout)
4.6.2、簡潔實現
在每個全連接層之后添加一個Dropout層
net = nn.Sequential(nn.Flatten(),nn.Linear(784, 256),nn.ReLU(),# 在第一個全連接層之后添加一個dropout層nn.Dropout(dropout1),nn.Linear(256, 256),nn.ReLU(),# 在第二個全連接層之后添加一個dropout層nn.Dropout(dropout2),nn.Linear(256, 10))def init_weights(m):if type(m) == nn.Linear:nn.init.normal_(m.weight, std=0.01)net.apply(init_weights);
訓練和測試
trainer = torch.optim.SGD(net.parameters(), lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
4.7、數值穩定性
參數初始化重要性:影響梯度和參數本身的穩定性
梯度計算的是矩陣與梯度向量的乘積,最初矩陣可能具有各種各樣的特征值,他們的乘積可能非常大也可能非常小。
不穩定梯度帶來的風險不止在于數值表示; 不穩定梯度也威脅到我們優化算法的穩定性。 梯度爆炸,參數更新過大,破壞模型穩定收斂;梯度消失,參數更新過小,模型無法學習。
當網絡有很多層時,sigmoid函數的輸入很大或是很小時,它的梯度都會消失,激活函數會選擇更穩定的ReLU系列函數。
參數對稱性
神經網絡設計中的另一個問題是其參數化所固有的對稱性。 假設我們有一個簡單的多層感知機,它有一個隱藏層和兩個隱藏單元。 在這種情況下,我們可以對第一層的權重 W ( 1 ) W^{(1)} W(1)進行重排列, 并且同樣對輸出層的權重進行重排列,可以獲得相同的函數。 第一個隱藏單元與第二個隱藏單元沒有什么特別的區別。 換句話說,我們在每一層的隱藏單元之間具有排列對稱性。
這種對稱性意味著在參數化的角度上,我們有多個等效的參數組合可以表示相同的函數。在神經網絡訓練過程中,可能會出現參數收斂到其中一個等效組合上,而忽略了其他等效組合。這可能導致訓練過程不穩定或收斂較慢。
小批量隨機梯度下降不會打破這種對稱性,但暫退法正則化可以。
如何讓訓練更加穩定?
讓梯度值在一個合理的范圍。
-
將乘法變加法【ResNet,LSTM】
-
歸一化【梯度歸一化,梯度裁剪】
-
合理的權重初始和激活函數
-
讓每層的方差是一個常數
- 將每層的輸出梯度看作隨機變量
- 讓他們的均值和方差都保持一致

















)

