?
這里演示的是演示的是光線與包圍盒測試。在裝備Winfast 8800GT 512M的臺式機上可以進行每秒4.6億次點到射線的距離計算計算,用于判斷點是否真正的與射線相交。外部數據的填充與準備延遲依舊是GPGPU應用的一個巨大門檻。白色是命中的包圍盒,綠色的就是射線了,在用于錄制動畫的7300go T2250上為大約15fps。下面是用于測試的點云Cornell Box模型。
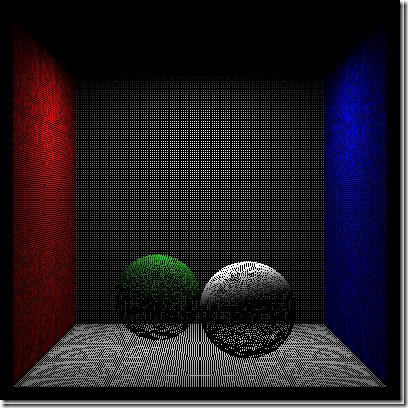
這個是使用RT出的陰影PASS,即將用于Relighting工具的陰影PASS結果計算。
?
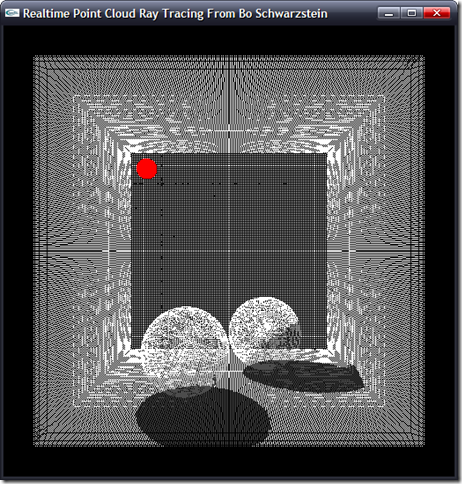
這里演示的是演示的是光線與包圍盒測試。在裝備Winfast 8800GT 512M的臺式機上可以進行每秒4.6億次點到射線的距離計算計算,用于判斷點是否真正的與射線相交。外部數據的填充與準備延遲依舊是GPGPU應用的一個巨大門檻。白色是命中的包圍盒,綠色的就是射線了,在用于錄制動畫的7300go T2250上為大約15fps。下面是用于測試的點云Cornell Box模型。
這個是使用RT出的陰影PASS,即將用于Relighting工具的陰影PASS結果計算。
本文來自互聯網用戶投稿,該文觀點僅代表作者本人,不代表本站立場。本站僅提供信息存儲空間服務,不擁有所有權,不承擔相關法律責任。 如若轉載,請注明出處:http://www.pswp.cn/news/276482.shtml 繁體地址,請注明出處:http://hk.pswp.cn/news/276482.shtml 英文地址,請注明出處:http://en.pswp.cn/news/276482.shtml
如若內容造成侵權/違法違規/事實不符,請聯系多彩編程網進行投訴反饋email:809451989@qq.com,一經查實,立即刪除!


)
![移動硬盤格式化(pc和mac共用)-菜鳥級解決方案[轉]](http://pic.xiahunao.cn/移動硬盤格式化(pc和mac共用)-菜鳥級解決方案[轉])










)

 如何在Ubuntu設定P7010的1280 x 768解析度? (OS) (Linux) (Ubuntu) (NB) (P7010))

