人類對未知領域總是充滿好奇和敬畏。
因為好奇,所以不斷探索,因為敬畏,所以小心謹慎。
談到人工智能,已經不僅僅是停留在智能手機、家用電器這個層次,要知道,人工智能的作用,不僅僅是為了方便生活,它還有一個重要的使命,那就是,幫助人類,完成對未知領域的探索。
隨著人工智能的不斷發展,機器人對于人類來說已經不再是一個稀奇的事務,商場里、銀行中,隨處都可能見到機器人的身影,但是,一個機器人能力再大,終究還是有限的,所以,今天的我們要了解的,就是群體智能,一個存在無線可能的機器人群體——ROBO-MAS多智能體自主協同實驗平臺
知乎視頻?www.zhihu.com總體 · 介紹
或許,你聽說過它的名字,但是你可能不了解它,或者說,ROBO-MAS對你來說,是比較陌生的。
那么接下來,我們就走近ROBO-MAS,跟隨ROBO-MAS一起,探索群體智能的奧妙吧。
ROBO-MAS多智能體自主協同實驗平臺是基于ROBO-MAS智能機器人搭建的開放式群體智能研究和多機器人智能協同的綜合實驗系統平臺。系統包括:人機交互軟件控制系統、ROBO-MAS智能機器人、光學投影定位模塊、射頻無線網絡通信模塊、無線充電平臺。目前系統已實現智能避障、智能跟隨、群體協作循跡、路徑規劃等功能。
系統的研發初衷是為群體智能研究和多機器人任務協同研究搭建基礎科研平臺,系統完全開放軟硬件接口,提供人機交互軟件控制系統中智能機器人路徑規劃、自主避障、智能跟隨、自動循跡、群體協作等群體智能算法所需要的的位置、方向、速度、加速度等數據接口,高度支持二次開發和科研任務移植。
系統為群體智能研究提供模擬仿真平臺,可實現群體智能算法的實物驗證,以為群體智能算法的推廣應用提供實際案例和數據支撐。
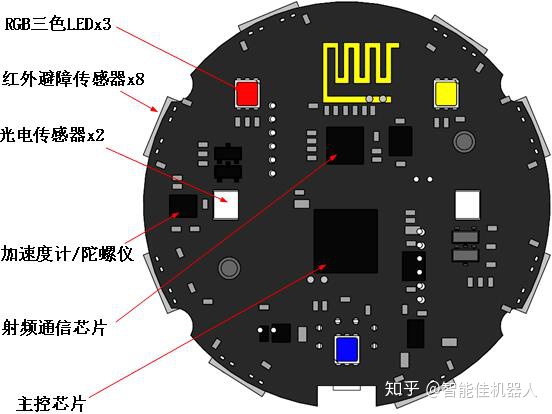
ROBO-MAS智能機器人搭載光電定位傳感器、紅外避障傳感器、六軸慣性傳感器模塊、主控芯片處理器、無線充電模塊、射頻無線通信模塊、電池管理模塊、電機驅動、直流電機、編碼器。可實時檢測機器人的位置、方位角、速度和加速度等信息,經處理器采集處理后通過無線射頻通信模塊實時反饋至上位機軟件控制系統作為路徑規劃、避障、跟隨和循跡等控制算法的原始數據來源。
產品· 功能
經過上面的總體介紹,你是不是對ROBO-MAS有了一定的了解,那么問題來了,ROBO-MAS都能實現什么功能呢?
1、實時定位
2、自主避障
3、路徑規劃
4、智能跟隨/用戶控制
5、自動循跡/路徑匹配
6、一鍵充電/自動返航充電
這樣,ROBO-MAS的功能是不是就一目了然了?
知乎視頻?www.zhihu.comROBO-MAS機器人。視頻來源于北京智能佳機器人。
產品 · 尺寸
了解了功能,知道了ROBO-MAS是什么,那么新的疑問一定就隨之而來,這一樣一個實驗平臺有多大?如果想要研究它,是不是要單獨準備一個大的房間?
這個問題,就是我們接下來該往下看的問題了,靜下心來,繼續看下去,你要的答案,都在這里。
系統平臺尺寸圖
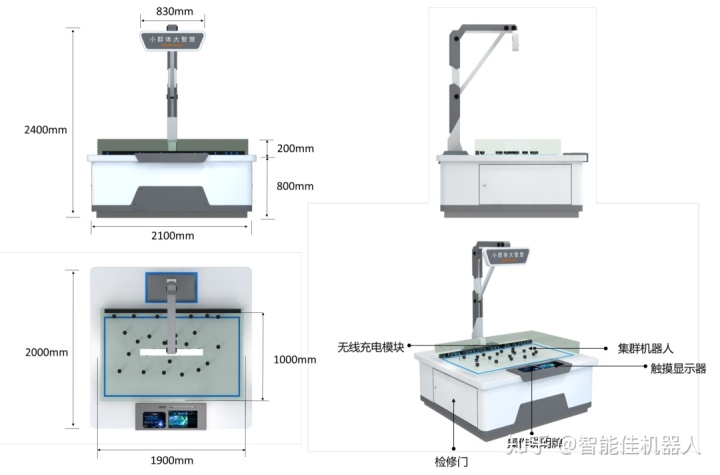
圖片來源于北京智能佳機器人。
ROBO-MAS機器人尺寸圖

圖片來源于北京智能佳機器人。

圖片來源于北京智能佳機器人。
圖片來源于北京智能佳機器人。
ROBO-MAS · 產品參數

圖片來源于北京智能佳機器人。
特點
那么,ROBO-MAS作為一個群體智能,有沒有自己的特點呢?答案是肯定的,如果沒有特點,那我們也沒必要研究它了。
1、智能機器人群體數量可增刪,具有良好的擴充性;
2、智能機器人之間無直接關聯,增加可控自由度和靈活性
3、智能機器人自主運行和上位機人機交互軟件進行實時控制
4、自組織,自組裝,即可單獨作業也可協同工作
5、(DLP Light Crafter 4500)
定位 · 原理
面向3D機器視覺基于數字光學處理技術的高精度數字光學投影儀,用于精確產生點云編碼陣列,ROBO-MAS智能機器人上搭載兩個光電傳感器,通過感知采集光譜陣列,通過處理器芯片解碼計算可以獲取兩個光電傳感器的具體位置坐標,進而可以計算出ROBO-MAS智能機器人的中心位置坐標信息和方位角信息,同時機器人本體搭載的編碼器和6軸慣性傳感器可獲取機器人的速度和加速度信息,基于此用戶可實現ROBO-MAS智能機器人群體的定位控制、路徑規劃控制、循跡跟隨控制、自主避障控制等功能,依據這些功能,可實現對智能群體控制算法的實物驗證分析。
路徑規劃 與 避障
基于全局匈牙利算法(全局路徑最短)
具體實現:用戶在上位機人機交互控制軟件系統上指定機器人的位置后,軟件內部的路徑規劃算法為各個機器人分配目標位置,進而控制機器人的行走速度和方向,機器人在行進過程中,依據算法的決策原則,每行進一步,都要進行一次規劃路徑和速度刷新,可實現動態實時檢測群體的行進狀態和位置,當群體受到干擾位置和速度發生改變后,控制算法可實時重新為群體進行最優路徑規劃,直至到達用戶指定目標位置結束。
基于單步ORCA算法(避障)
具體實現:機器人群體依據匈牙利算法,即從起始位置到目標位置總路徑最短的原則,進行隨機分配各個機器人的目標位置,機器人在行進過程中,每行進一步系統依據匈牙利算法會重新規劃路徑和分配目標位置,以此反復迭代,直至所有機器人都到達最終位置。
但在行進過程中,當群體數量較大,路徑復雜,機器人在行進過程中難免會出現路徑交叉或者相遇,為了避免群體機器人在行進過程中相遇,上位機人機交互控制軟件設計有ORCA算法,通過實時調控群體機器人的速度和運動方向來實現群體間的相互避障。同時,ROBO-MAS通過紅外傳感器可實現機器人對周圍4cm范圍內環境的感知,當檢測到物體時,通過實時調控機器人的運動狀態,可實現對固定物體的躲避。
DEMO
1.智能跟隨
2.自主避障
3.圖形模式(自主路徑規劃)
4.畫圖模式(自主路徑規劃)
5.實時手勢控制
6.環境感知:協同感知
拓展 · 應用
科學研究
1.群體智能算法
2.多機器人智能協同
智能群體模擬演練
1.消防演練(地震、火災、逃生、救災)
2.人員自然流動(疫情傳播模擬)
3.體育運動模擬(接力賽、足球賽:基于跟隨)
4.智能交通
5.物流分配模擬
模擬建模
1.自然群體(蟻群,魚群,鳥群,細菌)
2.分子擴散(有害氣體模型)
3.消息傳播模型
游戲娛樂
1.迷宮地圖
2.棋子類游戲(跳棋等)
具體 · 實現
集群智能是指一定數量的智能體之間通過局部感知和相對簡單的交互方式,完成個體不易實現的任務過程中所涌現出的復雜、強大的集群宏觀行為。集群智能是新一代人工智能的重要研究領域,也是單體智能未來發展的必然趨勢之一。
集群智能的涌現依賴于群體智能基礎層理論、鏈路層、信息層、決策層以及制導控制層的支撐和保障,涉及群智涌現機理機制、動態自組網、協同感知定位、協同決策規劃、協同制導控制、試驗驗證與綜合效能評估等關鍵技術。
協同控制可為集群智能涌現提供有利的時空協調保障,是集群智能涌現的核心關鍵技術和制高點技術。旨在為從事集群智能與協同控制相關理論研究、技術創新、產品研制及示范運用的學術界與產業界科研技術人員提供一個全國性、跨系統、跨行業、多學科的綜合性學術平臺。
以專委會為平臺和紐帶,更加充分發揮集群智能與協同控制行業內主要優勢單位和專家群體的作用,活躍學術氣氛,加強產學研用需求牽引和對接、技術交流和互動,推動該領域理論、方法和技術發展及工程化應用,促進指揮與控制學科發展,提高我國科學技術水平。
集群智能與協同控制充分融合人工智能理論、大系統理論、系統工程理論、協同控制理論、指揮與控制理論、導航制導與控制技術、通信與探測技術等多個學科和技術。
具體業務范圍和任務包括但不限于:探索集群智能涌現的機理、機制及方法,開展集群智能與協同控制技術領域的學術交流,促進學科發展,推動科技進步。




)




spring MVC配置)






與hashCode())

