輸入捕獲簡介:
輸入捕獲模式可以用來測量脈沖寬度或者測量頻率。STM32 的定時器,除了 TIM6 和 TIM7,其他定時器都有輸入捕獲功能。STM32 的輸入捕獲,簡單的說就是通過檢測 TIMx_CHx 上的邊沿信號,在邊沿信號發生跳變(比如上升沿/下降沿)的時候,將當前定時器的值(TIMx_CNT)存放到對應的通道的捕獲/比較寄存器(TIMx_CCRx)里面,完成一次捕獲。同時還可以配置捕獲時是否觸發中斷/DMA 等。
STM32 PWM工作過程:

STM32 輸入捕獲工作過程(通道1為例):

一句話總結工作過程:通過檢測TIMx_CHx上的邊沿信號,在邊沿信號發生跳變(比如上升沿/下降沿)的時候,將當前定時器的值(TIMx_CNT)存放到對應的捕獲/比較寄存器(TIMx_CCRx)里面,完成一次捕獲。
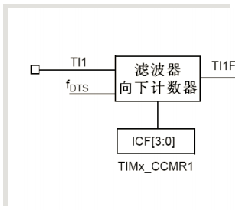
- 步驟1:設置輸入捕獲濾波器(通道1為例)

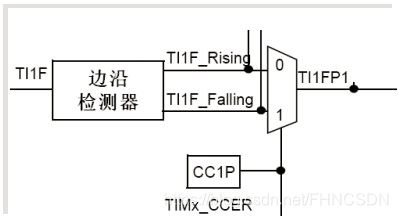
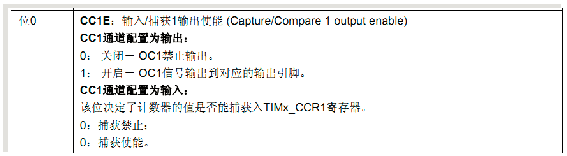
- 步驟2:設置輸入捕獲極性(通道1為例)

- 步驟三:設置輸入捕獲映射通道(通道1為例)


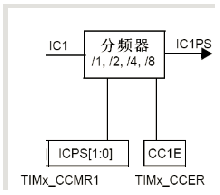
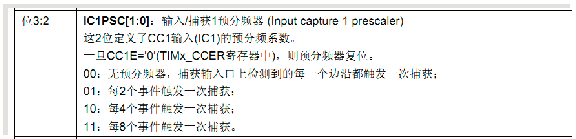
- 步驟四:設置輸入捕獲分頻器(通道1為例)
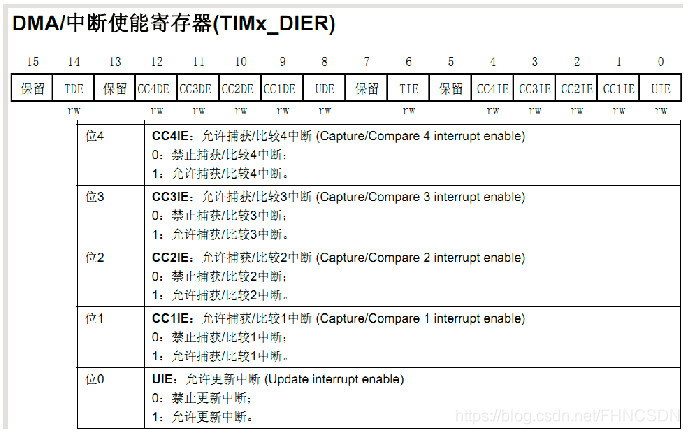
- 步驟五:捕獲到有效信號可以開啟中斷
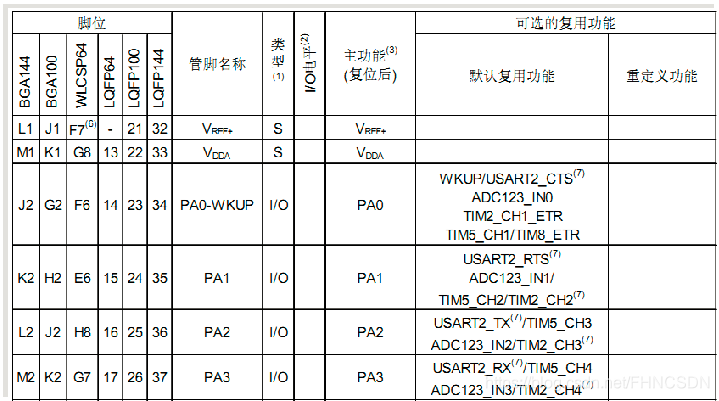
- 最后:看看定時器通道對應引腳TIM5為例
輸入捕獲通道初始化函數:
void TIM_ICInit(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct);ypedef struct
{uint16_t TIM_Channel; //捕獲通道1-4 uint16_t TIM_ICPolarity; //捕獲極性uint16_t TIM_ICSelection; //映射關系uint16_t TIM_ICPrescaler; //分頻系數uint16_t TIM_ICFilter; //濾波器
} TIM_ICInitTypeDef;TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; //選擇輸入端 IC1
TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕獲
TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到 TI1 上
TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置輸入分頻,不分頻
TIM5_ICInitStructure.TIM_ICFilter = 0x00; //IC1F=0000 配置輸入濾波器 不濾波
TIM_ICInit(TIM5, &TIM5_ICInitStructure); //初始化 TIM5 輸入捕獲通道 1
通道極性設置獨立函數:
void TIM_OCxPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
獲取通道捕獲值
uint32_t TIM_GetCapture1(TIM_TypeDef* TIMx);
輸入捕獲的一般配置步驟:
1、初始化定時器和通道對應IO的時鐘
- 初始化IO口,模式為輸入:
GPIO_Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 輸入
- 初始化定時器ARR,PSC
TIM_TimeBaseInit();
2、初始化輸入捕獲通道
TIM_ICInit();
3、如果要開啟捕獲中斷
TIM_ITConfig();NVIC_Init();
4、使能定時器:
TIM_Cmd();
5、編寫中斷服務函數:
TIMx_IRQHandler();
更新中斷和捕獲中斷
u8 TIM5CH1_CAPTURE_STA=0; //輸入捕獲狀態
u16 TIM5CH1_CAPTURE_VAL; //輸入捕獲值//定時器5中斷服務程序
void TIM5_IRQHandler(void)
{ if((TIM5CH1_CAPTURE_STA&0X80)==0)//還未成功捕獲 { if (TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET){ if(TIM5CH1_CAPTURE_STA&0X40)//已經捕獲到高電平了{if((TIM5CH1_CAPTURE_STA&0X3F)==0X3F)//高電平太長了{TIM5CH1_CAPTURE_STA|=0X80;//標記成功捕獲了一次TIM5CH1_CAPTURE_VAL=0XFFFF;//計數器的最大值}else TIM5CH1_CAPTURE_STA++;//標記有幾次更新事件} }if (TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET)//捕獲1發生捕獲事件{ if(TIM5CH1_CAPTURE_STA&0X40) //捕獲到一個下降沿 { TIM5CH1_CAPTURE_STA|=0X80; TIM5CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5);//標記成功捕獲到一次高電平脈寬TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); //CC1P=0 設置為上升沿捕獲}else //還未開始,第一次捕獲上升沿{TIM5CH1_CAPTURE_STA=0; //清空TIM5CH1_CAPTURE_VAL=0;TIM_SetCounter(TIM5,0);TIM5CH1_CAPTURE_STA|=0X40; //標記捕獲到了上升沿TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Falling); //CC1P=1 設置為下降沿捕獲} } }TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); //清除中斷標志位}
main.c部分代碼:
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "timer.h"extern u8 TIM5CH1_CAPTURE_STA; //輸入捕獲狀態
extern u16 TIM5CH1_CAPTURE_VAL; //輸入捕獲值 int main(void){ u32 temp=0; delay_init(); //延時函數初始化 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //設置NVIC中斷分組2:2位搶占優先級,2位響應優先級uart_init(115200); //串口初始化為115200LED_Init(); //LED端口初始化TIM3_PWM_Init(899,0); //不分頻。PWM頻率=72000/(899+1)=80KhzTIM5_Cap_Init(0XFFFF,72-1); //以1Mhz的頻率計數 while(1){delay_ms(10);TIM_SetCompare2(TIM3,TIM_GetCapture2(TIM3)+1);if(TIM_GetCapture2(TIM3)==300)TIM_SetCompare2(TIM3,0); if(TIM5CH1_CAPTURE_STA&0X80)//成功捕獲到了一次上升沿{temp=TIM5CH1_CAPTURE_STA&0X3F;temp*=65536;//溢出時間總和temp+=TIM5CH1_CAPTURE_VAL;//得到總的高電平時間printf("HIGH:%d us\r\n",temp);//打印總的高點平時間TIM5CH1_CAPTURE_STA=0;//開啟下一次捕獲}}}
看中斷部分代碼時建議從下向上看,從else向上看,最開始初始化設置的就是上升沿捕獲,所以先執行最后一個else然后再進行下降沿的捕獲進入if語句,從而完成了一次高電平脈寬的測量,若脈寬比較長在計時器溢出后還沒有變為低電平,則在判斷是否發生更新事件,若發生,則執行TIM5CH1_CAPTURE_STA++,記錄溢出的次數,最大為2的6次方,若TIM5CH1_CAPTURE_STA&0x3f==0x3f,說明已達到TIM5CH1_CAPTURE_STA所能記錄的最大溢出次數,所以就結束捕獲,然后就會進入main函數進行計算高電平的脈寬。
(以上是個人理解,若有錯誤請指正)

)


 created for connector with address null and port 8091...)

)




)



)



)