概念
??????? 工具坐標系是把機器人腕部法蘭盤所握工具的有效方向定為Z軸,把坐標定義在工具尖端點,所以工具坐標的方向隨腕部的移動而發生變化。
??????? 工具坐標的移動,以工具的有效方向為基準,與機器人的位置、姿勢無關,所以進行相對于工件不改變工具姿勢的平行移動操作時最為適宜。
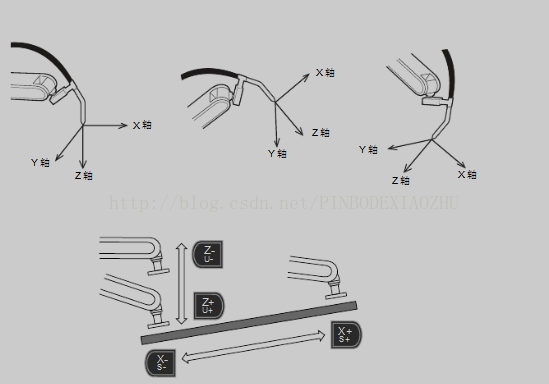
??????? 建立了工具坐標系后,機器人的控制點也轉移到了工具的尖端點上,這樣示教時可以利用控制點不變的操作方便地調整工具姿態,并可使插補運算時軌跡更為精確。所以,不管是什么機型的機器人,用于什么用途,只要安裝的工具有個尖端,在示教程序前務必要準確地建立工具坐標系。
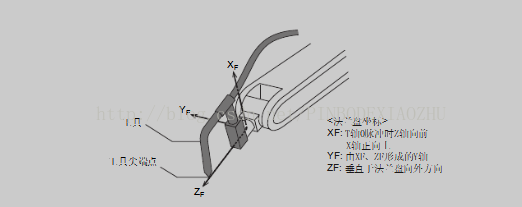
??????? 位置數據
??????? 位置數據是指工具尖端點在法蘭盤坐標系下的坐標值。?
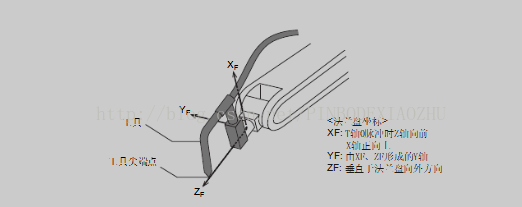
位置數據的創建方法有兩種。
??????? 1? 直接輸入法(不推薦使用)
? ? ? ? ??? 如果已知工具的具體尺寸,可直接輸入具體數值。
??????? 2? 工具校驗(常用)
??????????? 進行工具校驗,需以控制點為基準示教5個不同的姿態(TC1至 5)。根據這5個數據自動算出工具尺寸。應把各點的姿態設定為任意方向的姿態。若采用偏向某一方向的姿態,可能出現精度不準的情況。
)



)


測試工具http_load、webbench、ab、Siege、autobench簡單使用教程(轉)...)
)



)



![[SceneKit專題]11-Reference-Nodes引用節點](http://pic.xiahunao.cn/[SceneKit專題]11-Reference-Nodes引用節點)


