一:攝像機成像原理

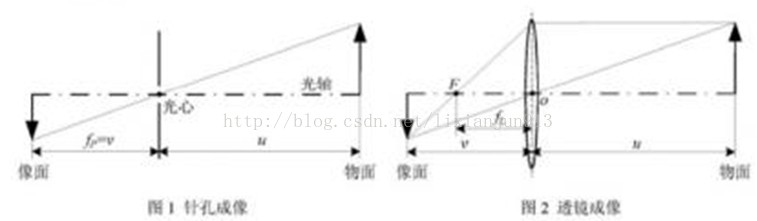
????????攝像機成像模型一般有三種:透鏡投影模型(小孔攝像機模型)、正交投影模型和透視投影模型
光學中最基本的高斯成像公式:1/u?+?1/v?=?1/f?????? (式一)
原理圖如下:
二:認識三個坐標系
????????????????????????????????????????????
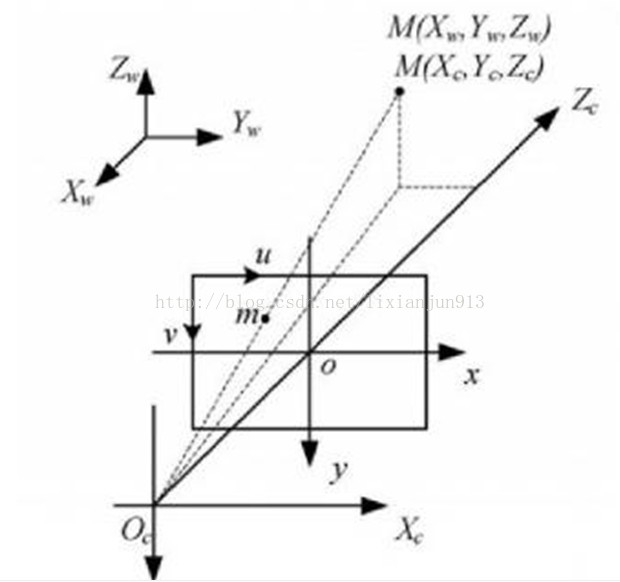
???????????????????????????????????????????????????????????????????????????????????????????????????????????? 三個坐標系的關系圖
如上圖表示的三個坐標系分別為世界坐標系,攝像機坐標系,圖像坐標系
1:世界坐標系(Xw Yw Zw)
??? 用戶定義的空間三維坐標系,用來描述三維空間中的物體和相機之間的坐標位置,滿足右手法則
2:攝像機坐標系(Xc Yc Zc)
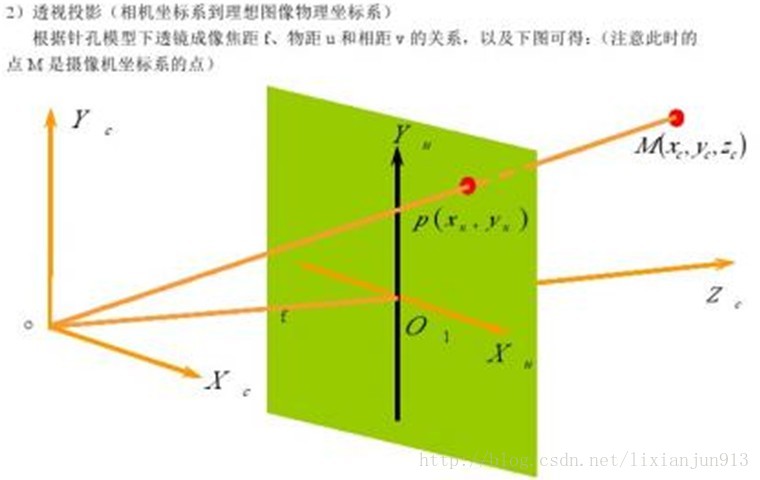
以相機的光心作為原點,Zc軸與光軸重合,并垂直于成像平面,且取攝影方向為正方向,Xc、Yc軸與圖像物理坐標系的x,y軸平行,且OcO為攝像機的焦距f
3:圖像坐標系
是以圖像的左上方為原點,的圖像坐標系(u v)(此坐標以像素為單位),這里我們建立了圖像物理坐標系(x y)為xoy坐標系(此坐標系以毫米為單位)。
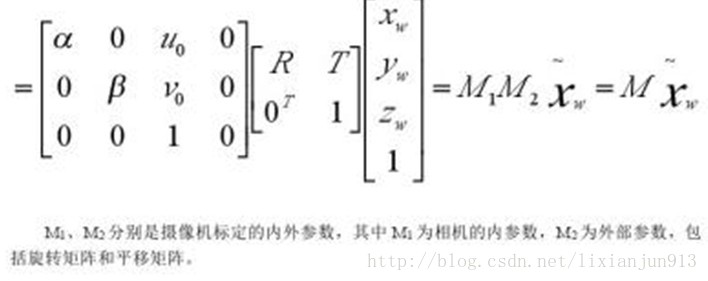
三:相機標定原理
?

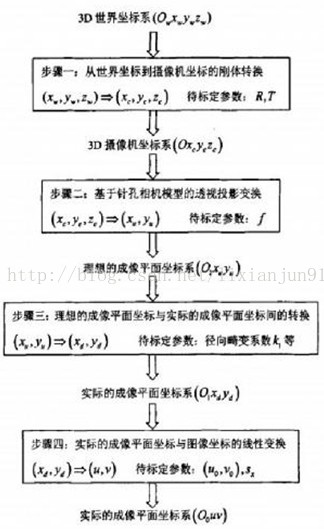
1:剛體變換
???????? 剛體變換的過程就是世界坐標系中的一點到攝像機坐標系中的點,可以由一個旋轉矩陣R和一個平移矩陣t來描述,則存在如下剛體變換公式:


3:幾何畸變
由于攝像機制造工藝偏差,以及入射光線在通過各個透鏡時的折射誤差和CCD點陣位置誤差等,實際的光學系統存在著非線性幾何失真,從而使目標像點與理論像點之間存在著多種幾何畸變。

幾何畸變主要包括徑向畸變、切向畸變和薄棱鏡畸變。
1) 徑向畸變
徑向畸變可分為枕形畸變和桶形畸變,主要由鏡頭形狀缺陷造成。徑向畸變效果圖如圖

其數學模型為:
?????????????????????????????????

其中,
2) 切向畸變
切向畸變主要包括離心畸變和薄棱鏡畸變。其中,離心畸變是由攝像機的鏡頭中各透鏡的光軸不能完全重合造成的。
切向畸變的數學模型可表示為:
??????????????

綜上可得理想圖像點坐標和實際圖像點坐標之間的關系可表示為:
??????
其中,
3) 薄棱鏡畸變
薄棱鏡畸變是由鏡頭設計和制造缺陷等誤差造成的,比如鏡頭與攝像機像面之間有很小的傾角等。這類畸變就相當于是在光學系統中附加了一個薄棱鏡,所以它不僅會引起徑向偏差,而且還會引起切向誤差。薄棱鏡畸變的數學模型為:
?????
?????????

???


?

)








--expo中的自定義樣式Custom font,以及expo中的路由RouteNavigation)



 【計算機視覺學習筆記--雙目視覺幾何框架系列】)



)
