八、走向三維
? ? ? ? 我們前面花了七篇博文做鋪墊,我們所做的一切努力都是為了最后的這一擊——立體成像。因為玉米的這個系列文章是對雙目視覺幾何框架的總結。此處跳過匹配,假設左右圖像點的完美匹配的。只看在幾何上,三維坐標是如何被還原的。相對來說,最后的這一步,比前面是要輕松許多的,因為我們前面已經做了大量的工作。這些工作使得最后的這一步,由不可能稱為可能,由復雜變得簡單,吧啦吧啦。好吧,閑話少說,讓我們一起來見證這一時刻吧。??
? ? ? ? 此處我們按opencv中cvcalibratecamera2()函數得到的焦距f進行三維坐標的求解。
? ? ? ? 請大家看下面示意圖(莫怪,玉米的圖一向畫的丑):
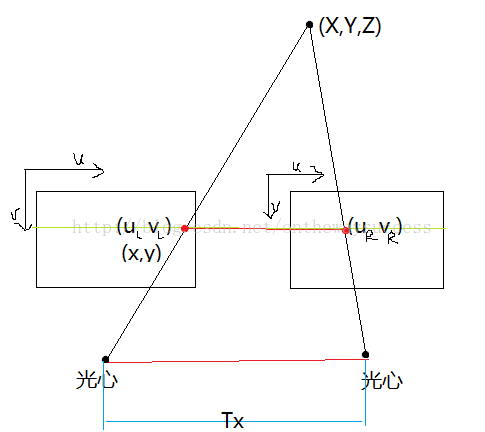
? ? ? ? 根據最簡單的相似三角形關系,我們就可以求出,物點坐標(X,Y,Z)。
? ? ? ? 首先,
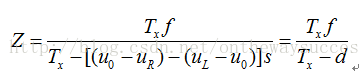
? ? ? ? ?其中,s為像素的物理尺寸,d就是兩個攝像機間的視差,d=(uL-uR)s。
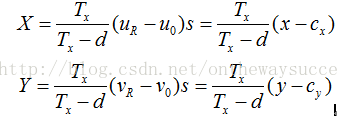
? ? ? ? 我們得到的這個三維坐標,相當于是在右攝像機的攝像機坐標系上的。
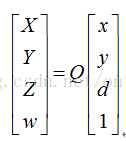
? ? ? ?那么重建就是透視投影的逆過程,我們可以把這個過程表示成矩陣形式。我們定義Q為反投影矩陣。那么依照上式:
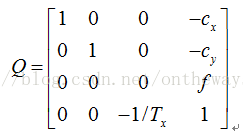
? ? ? ? 齊次坐標形式的三維坐標恢復,矩陣形式如下:
? ? ? ? 至此,玉米的《計算機視覺學習筆記》雙目視覺幾何框架系列文章順利收尾。希望這八篇博文對大家,尤其是計算機視覺的初學者有所幫助。
? ? ? ? 在行文過程中,玉米引用了網絡上的一些圖片,但大多找不到出處,所以未給出引用表。如這些圖片的主人,發現了自己的圖片在這個博客上,請和玉米聯系,玉米會將引用出處,重新給出!
? ? ? ?本系列博文中涉及的數學運算頗多,玉米才疏學淺,中間若有理解上的錯誤,懇請大家批評指正!









![BZOJ 1937: [Shoi2004]Mst 最小生成樹 [二分圖最大權匹配]](http://pic.xiahunao.cn/BZOJ 1937: [Shoi2004]Mst 最小生成樹 [二分圖最大權匹配])


MapReduce框架Combiner分區)


)


