分類:機器人學
一、問題描述
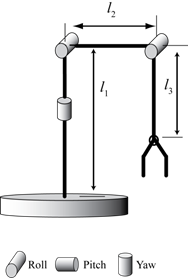
? 如右圖所示的三自由度機械臂,關節1和關節2相互垂直,關節2和關節3相互平行。如圖所示,所有關節均處于初始狀態。 ? 要求: (1) 定義并標注出各關節的正方向; (2) 定義機器人基坐標系{0}及連桿坐標系{1},{2},{3}; (3) 求變換矩陣 , , ; (4) 根據末端腕部位置 (x, y, z) 返求出對應關節 , , ; (5) 利用軟件繪制出機器人模型的三維點線圖,并控制機器人腕部沿半徑r=0.1的圓弧運動. ?
?
二、任務求解
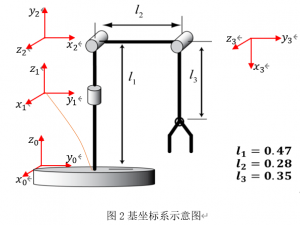
2.1建立坐標系
?
?
2.2?變換矩陣
2.2.1?變換求解
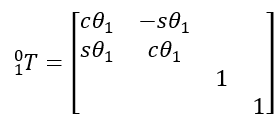
??(1)連桿坐標系{1}——基坐標系{0}?? 原點重合,可繞z軸任意旋轉 ?
??(2)連桿坐標系{2}——連桿坐標系{1}?先繞x軸旋轉90°,再繞新得到的y軸旋轉90°,然后沿新得到的y軸平移 ,最后得到的坐標系可繞z軸任意旋轉 ???3)連桿坐標系{3}——連桿坐標系{2}?? 繞z軸旋轉-90°,再沿新得到的y軸平移 ,最后得到的坐標系可繞z軸任意旋轉 ??
2.2.2?物理意義求解
? 變換矩陣的前三列,每列值對應的數為變換坐標系的坐標軸x、y、z在基坐標系中的坐標位置,第四列為變換坐標系的原點在基坐標系中的坐標位置,第四行為齊次補行數據,則可根據坐標系的位置直接列出下式: ?

? 可見,兩種方式的結果表達式一致。
2.2.3?變換矩陣終解
?

?
2.3?逆運動學求解
2.3.1?矩陣逆推導
? 由連桿坐標系{3}到基座坐標系{0}的齊次矩陣可以表示為 ?
? 末端執行器的位置在基座坐標系{0}中的描述為 ?? 末端執行器的位置在基座坐標系{0}中的描述為 ?? 關系為: ?? 根據矩陣對應元素相等,由MATLAB計算可得可得下面等式: ?
x=-(7*cos(a2)*sin(a1))/25-(7*cos(a2)*sin(a1)*sin(a3))/20(7*cos(a3)* sin(a1)*sin(a2))/20 y=(7*cos(a1)*cos(a2))/25+(7*cos(a1)*cos(a2)*sin(a3))/20+(7*cos(a1)*cos(a3)*sin(a2))/20 z=(7*sin(a2))/25 + (7*sin(a2)*sin(a3))/20 - (7*cos(a2)*cos(a3))/20 + 47/100
由 ?
? 則: ?? 由對應元素相等,得:
(x*cos(a1))/(cos(a1)^2 + sin(a1)^2) + (y*sin(a1))/(cos(a1)^2 + sin(a1)^2)=0(y*cos(a1))/(cos(a1)^2 + sin(a1)^2) - (x*sin(a1))/(cos(a1)^2 + sin(a1)^2)=(7*cos(a2))/25+(7*cos(a2)*sin(a3))/20+(7*cos(a3)*sin(a2))/20z=(7*sin(a2))/25 + (7*sin(a2)*sin(a3))/20 - (7*cos(a2)*cos(a3))/20 + 47/100
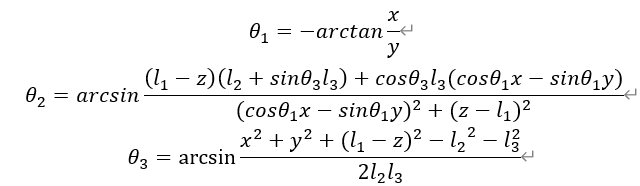
? 綜上可得, ?
?
2.3.2?幾何推導
? 在x0y平面,將末端執行器的軌跡投影到該平面,藍色表示原位置,橘色代表移動后的位置,黑色坐標系為基坐標系,如下圖: ?
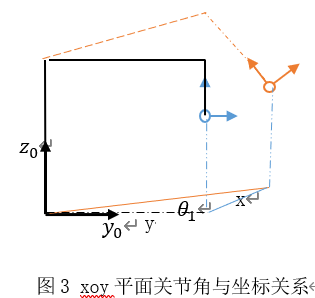
? 由圖易見, 為末端執行器投影到xoy平面x與y的夾角,(逆時針為正), ?? 在y0z平面,將末端執行器的軌跡投影到該平面,藍色表示原位置,橘色代表移動后的位置,黑色坐標系為基坐標系,如下圖: ? ??? 將末端執行器的軌跡投影到下圖所示平面,藍色表示原位置,橘色代表移動后的位置,黑色坐標系為基坐標系,如下圖: ?? 構建直角三角形,可得: ?? 綜上,得各關節角與坐標位置的關系為: ??
三、D-H模型法求解
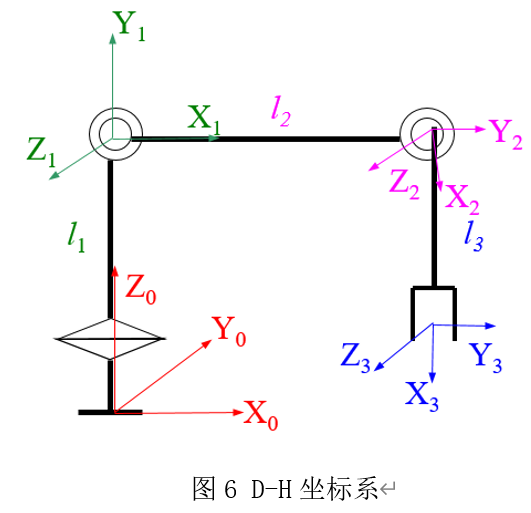
3.1?坐標系建立
? 0號桿件固連在基座上,建立基坐標系 ?
?
3.2 D-H參數
?

?
3.3?各關節變換矩陣
? 若已知四個參數就完全確定了兩連桿之間的相對關系。對此,我們建立基坐標系和連桿運動坐標系之間的變換關系。對于旋轉關節可以確定以下的齊次矩陣 ? 即先繞x軸旋轉, ?

? 然后沿x軸移動,再沿基坐標系的z軸移動d,最后繞z軸旋轉 ? 將參數代入上式,由此可以得到各關節變換矩陣 ??
3.4?求逆變換
? 同2.3.1 ?
四、軟件仿真
4.1?程序代碼
? 用軟件python(x,y)編寫代碼,如下: ?

?
4.2?仿真結果
?
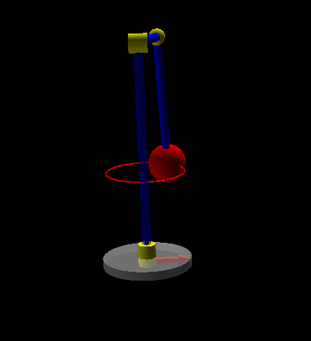
運動學建模仿真Python


)









![Bzoj3628: [JLOI2014]天天酷跑](http://pic.xiahunao.cn/Bzoj3628: [JLOI2014]天天酷跑)






