- 🍨 本文為🔗365天深度學習訓練營 中的學習記錄博客
- 🍖 原作者:K同學啊 | 接輔導、項目定制
文章目錄
- 前言
- 1 我的環境
- 2 代碼實現與執行結果
- 2.1 前期準備
- 2.1.1 引入庫
- 2.1.2 設置GPU(如果設備上支持GPU就使用GPU,否則使用CPU)
- 2.1.3 導入數據
- 2.1.4 查看數據
- 2.1.5.數據可視化
- 2.2 構建CNN網絡模型
- 2.3 訓練模型
- 2.3.1 訓練模型
- 2.3.2 編寫訓練函數
- 2.3.3 編寫測試函數
- 2.3.4 正式訓練
- 2.4 結果可視化
- 3 知識點詳解
- 3.1 torch.nn常用網絡層Conv2d、Linear和MaxPool2d詳解
- 3.1.1 torch.nn.Conv2d()詳解
- 3.1.2 torch.nn.Linear()詳解
- 3.1.3 torch.nn.MaxPool2d()詳解
- 3.1.4. 關于卷積層、池化層的計算:
- 3.2. torch.nn網絡訓練相關函數optimizer.zero_grad()、loss.backward()、optimizer.step()詳解
- 3.2.1 optimizer.zero_grad()
- 3.2.2 loss.backward()
- 3.2.3 optimizer.step()
- 3.3 opencv、matplotlib、pillow和pytorch讀取數據的通道順序
- 總結
前言
本文將采用pytorch框架創建CNN網絡,實現簡單彩色圖片分類。講述實現代碼與執行結果,并淺談涉及知識點。
關鍵字: torch.nn常用網絡層Conv2d、Linear和MaxPool2d詳解,torch.nn網絡訓練相關函數optimizer.zero_grad()、loss.backward()、optimizer.step()詳解, opencv、matplotlib、pillow和pytorch讀取數據的通道順序。
1 我的環境
- 電腦系統:Windows 11
- 語言環境:python 3.8.6
- 編譯器:pycharm2020.2.3
- 深度學習環境:
torch == 1.9.1+cu111
torchvision == 0.10.1+cu111 - 顯卡:NVIDIA GeForce RTX 4070
2 代碼實現與執行結果
2.1 前期準備
2.1.1 引入庫
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用來正常顯示中文標簽
plt.rcParams['axes.unicode_minus'] = False # 用來正常顯示負號
plt.rcParams['figure.dpi'] = 100 # 分辨率
import torchvision
import numpy as np
from torchinfo import summary
import torch.nn.functional as F
import warningswarnings.filterwarnings('ignore') # 忽略一些warning內容,無需打印
2.1.2 設置GPU(如果設備上支持GPU就使用GPU,否則使用CPU)
"""前期準備-設置GPU-"""
# 如果設備上支持GPU就使用GPU,否則使用CPU
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(device)
輸出
cuda
2.1.3 導入數據
'''前期工作-導入數據'''
train_ds = torchvision.datasets.CIFAR10('data',train=True,transform=torchvision.transforms.ToTensor(), # 將數據類型轉化為Tensordownload=True)test_ds = torchvision.datasets.CIFAR10('data',train=False,transform=torchvision.transforms.ToTensor(), # 將數據類型轉化為Tensordownload=True)
batch_size = 32train_dl = torch.utils.data.DataLoader(train_ds, batch_size=batch_size, shuffle=True)test_dl = torch.utils.data.DataLoader(test_ds, batch_size=batch_size)
2.1.4 查看數據
'''前期工作-查看數據'''
# 取一個批次查看數據格式
# 數據的shape為:[batch_size, channel, height, weight]
# 其中batch_size為自己設定,channel,height和weight分別是圖片的通道數,高度和寬度。
imgs, labels = next(iter(train_dl)) # 通過 iter(train_dl) 創建一個數據迭代器,然后使用 next(train_dl) 從訓練數據加載一個批次的圖像和對應的標簽。
# images包含了一批圖像,labels 包含了這些圖像的類別標簽。
print(imgs.shape)
輸出
torch.Size([32, 1, 28, 28])
2.1.5.數據可視化
'''前期工作-數據可視化'''
# 指定圖片大小,圖像大小為20寬、5高的繪圖(單位為英寸inch)
plt.figure(figsize=(20, 5))
for i, img in enumerate(imgs[:20]):npimg = img.numpy().transpose((1, 2, 0))# 轉換圖像的數組格式 : transpose (C, H, W) -> (H, W, C)# 將整個figure分成2行10列,繪制第i+1個子圖。plt.subplot(2, 10, i + 1)plt.imshow(npimg)plt.axis('off')plt.show() #如果你使用的是Pycharm編譯器,請加上這行代碼
2.2 構建CNN網絡模型
"""構建CNN網絡"""num_classes = 10 # 圖片的類別數class Model(nn.Module):def __init__(self):super().__init__()# 特征提取網絡self.conv1 = nn.Conv2d(3, 64, kernel_size=3) # 第一層卷積,卷積核大小為3*3self.pool1 = nn.MaxPool2d(kernel_size=2) # 設置池化層,池化核大小為2*2self.conv2 = nn.Conv2d(64, 64, kernel_size=3) # 第二層卷積,卷積核大小為3*3self.pool2 = nn.MaxPool2d(kernel_size=2)self.conv3 = nn.Conv2d(64, 128, kernel_size=3) # 第二層卷積,卷積核大小為3*3self.pool3 = nn.MaxPool2d(kernel_size=2)# 分類網絡self.fc1 = nn.Linear(512, 256)self.fc2 = nn.Linear(256, num_classes)# 前向傳播def forward(self, x):x = self.pool1(F.relu(self.conv1(x)))x = self.pool2(F.relu(self.conv2(x)))x = self.pool3(F.relu(self.conv3(x)))x = torch.flatten(x, start_dim=1)x = F.relu(self.fc1(x))x = self.fc2(x)return x# 將模型轉移到GPU中(我們模型運行均在GPU中進行)
model = Model().to(device)
summary(model)
輸出
=================================================================
Layer (type:depth-idx) Param #
=================================================================
Model --
├─Conv2d: 1-1 1,792
├─MaxPool2d: 1-2 --
├─Conv2d: 1-3 36,928
├─MaxPool2d: 1-4 --
├─Conv2d: 1-5 73,856
├─MaxPool2d: 1-6 --
├─Linear: 1-7 131,328
├─Linear: 1-8 2,570
=================================================================
Total params: 246,474
Trainable params: 246,474
Non-trainable params: 0
=================================================================
2.3 訓練模型
2.3.1 訓練模型
"""訓練模型--設置超參數"""
loss_fn = nn.CrossEntropyLoss() # 創建損失函數,計算實際輸出和真實相差多少,交叉熵損失函數,事實上,它就是做圖片分類任務時常用的損失函數
learn_rate = 1e-2 # 學習率
opt = torch.optim.SGD(model.parameters(), lr=learn_rate) # 作用是定義優化器,用來訓練時候優化模型參數;其中,SGD表示隨機梯度下降,用于控制實際輸出y與真實y之間的相差有多大2.3.2 編寫訓練函數
"""訓練模型--編寫訓練函數"""
# 訓練循環
def train(dataloader, model, loss_fn, optimizer):size = len(dataloader.dataset) # 訓練集的大小,一共60000張圖片num_batches = len(dataloader) # 批次數目,1875(60000/32)train_loss, train_acc = 0, 0 # 初始化訓練損失和正確率for X, y in dataloader: # 加載數據加載器,得到里面的 X(圖片數據)和 y(真實標簽)X, y = X.to(device), y.to(device) # 用于將數據存到顯卡# 計算預測誤差pred = model(X) # 網絡輸出loss = loss_fn(pred, y) # 計算網絡輸出和真實值之間的差距,targets為真實值,計算二者差值即為損失# 反向傳播optimizer.zero_grad() # 清空過往梯度loss.backward() # 反向傳播,計算當前梯度optimizer.step() # 根據梯度更新網絡參數# 記錄acc與losstrain_acc += (pred.argmax(1) == y).type(torch.float).sum().item()train_loss += loss.item()train_acc /= sizetrain_loss /= num_batchesreturn train_acc, train_loss
2.3.3 編寫測試函數
"""訓練模型--編寫測試函數"""
# 測試函數和訓練函數大致相同,但是由于不進行梯度下降對網絡權重進行更新,所以不需要傳入優化器
def test(dataloader, model, loss_fn):size = len(dataloader.dataset) # 測試集的大小,一共10000張圖片num_batches = len(dataloader) # 批次數目,313(10000/32=312.5,向上取整)test_loss, test_acc = 0, 0# 當不進行訓練時,停止梯度更新,節省計算內存消耗with torch.no_grad(): # 測試時模型參數不用更新,所以 no_grad,整個模型參數正向推就ok,不反向更新參數for imgs, target in dataloader:imgs, target = imgs.to(device), target.to(device)# 計算losstarget_pred = model(imgs)loss = loss_fn(target_pred, target)test_loss += loss.item()test_acc += (target_pred.argmax(1) == target).type(torch.float).sum().item()#統計預測正確的個數test_acc /= sizetest_loss /= num_batchesreturn test_acc, test_loss2.3.4 正式訓練
"""訓練模型--正式訓練"""
epochs = 10
train_loss = []
train_acc = []
test_loss = []
test_acc = []for epoch in range(epochs):model.train()epoch_train_acc, epoch_train_loss = train(train_dl, model, loss_fn, opt)model.eval()epoch_test_acc, epoch_test_loss = test(test_dl, model, loss_fn)train_acc.append(epoch_train_acc)train_loss.append(epoch_train_loss)test_acc.append(epoch_test_acc)test_loss.append(epoch_test_loss)template = ('Epoch:{:2d}, Train_acc:{:.1f}%, Train_loss:{:.3f}, Test_acc:{:.1f}%,Test_loss:{:.3f}')print(template.format(epoch + 1, epoch_train_acc * 100, epoch_train_loss, epoch_test_acc * 100, epoch_test_loss))
print('Done')
輸出
Epoch: 1, Train_acc:13.6%, Train_loss:2.263, Test_acc:22.1%,Test_loss:2.085
Epoch: 2, Train_acc:25.5%, Train_loss:2.003, Test_acc:29.4%,Test_loss:1.921
Epoch: 3, Train_acc:33.6%, Train_loss:1.808, Test_acc:32.6%,Test_loss:1.931
Epoch: 4, Train_acc:40.4%, Train_loss:1.630, Test_acc:41.6%,Test_loss:1.627
Epoch: 5, Train_acc:44.5%, Train_loss:1.527, Test_acc:45.4%,Test_loss:1.540
Epoch: 6, Train_acc:47.9%, Train_loss:1.441, Test_acc:49.7%,Test_loss:1.384
Epoch: 7, Train_acc:51.2%, Train_loss:1.355, Test_acc:51.3%,Test_loss:1.357
Epoch: 8, Train_acc:54.2%, Train_loss:1.283, Test_acc:53.7%,Test_loss:1.291
Epoch: 9, Train_acc:57.0%, Train_loss:1.212, Test_acc:57.4%,Test_loss:1.202
Epoch:10, Train_acc:59.0%, Train_loss:1.159, Test_acc:55.5%,Test_loss:1.251
Done
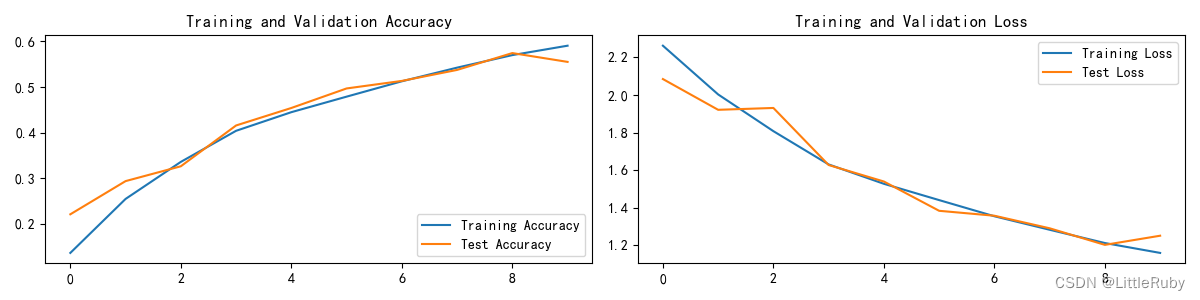
2.4 結果可視化
"""訓練模型--結果可視化"""
epochs_range = range(epochs)plt.figure(figsize=(12, 3))
plt.subplot(1, 2, 1)plt.plot(epochs_range, train_acc, label='Training Accuracy')
plt.plot(epochs_range, test_acc, label='Test Accuracy')
plt.legend(loc='lower right')
plt.title('Training and Validation Accuracy')plt.subplot(1, 2, 2)
plt.plot(epochs_range, train_loss, label='Training Loss')
plt.plot(epochs_range, test_loss, label='Test Loss')
plt.legend(loc='upper right')
plt.title('Training and Validation Loss')
plt.show()
3 知識點詳解
3.1 torch.nn常用網絡層Conv2d、Linear和MaxPool2d詳解
3.1.1 torch.nn.Conv2d()詳解
函數原型:
torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode=‘zeros’, device=None, dtype=None)
關鍵參數說明:
in_channels ( int ) – 輸入圖像中的通道數
out_channels ( int ) – 卷積產生的通道數
kernel_size ( int or tuple ) – 卷積核的大小
stride ( int or tuple , optional ) – 卷積的步幅。默認值:1
padding ( int , tuple或str , optional ) – 添加到輸入的所有四個邊的填充。默認值:0
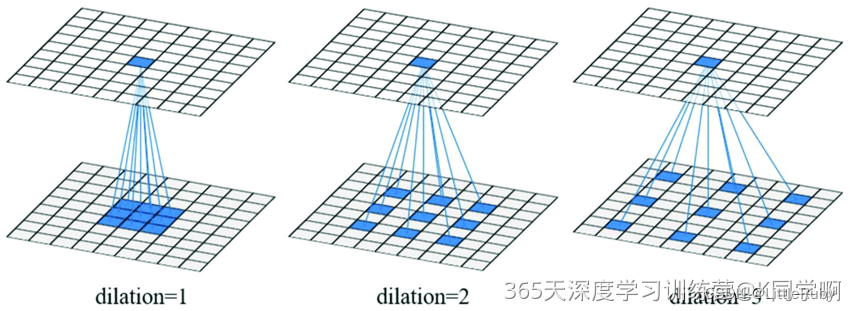
dilation (int or tuple, optional) - 擴張操作:控制kernel點(卷積核點)的間距,默認值:1。
padding_mode (字符串,可選) – ‘zeros’, ‘reflect’, ‘replicate’或’circular’. 默認:‘zeros’
關于dilation參數圖解:
3.1.2 torch.nn.Linear()詳解
函數原型:
torch.nn.Linear(in_features, out_features, bias=True, device=None, dtype=None)
關鍵參數說明:
in_features:每個輸入樣本的大小
out_features:每個輸出樣本的大小
3.1.3 torch.nn.MaxPool2d()詳解
函數原型:
torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
關鍵參數說明:
kernel_size:最大的窗口大小
stride:窗口的步幅,默認值為kernel_size
padding:填充值,默認為0
dilation:控制窗口中元素步幅的參數
3.1.4. 關于卷積層、池化層的計算:
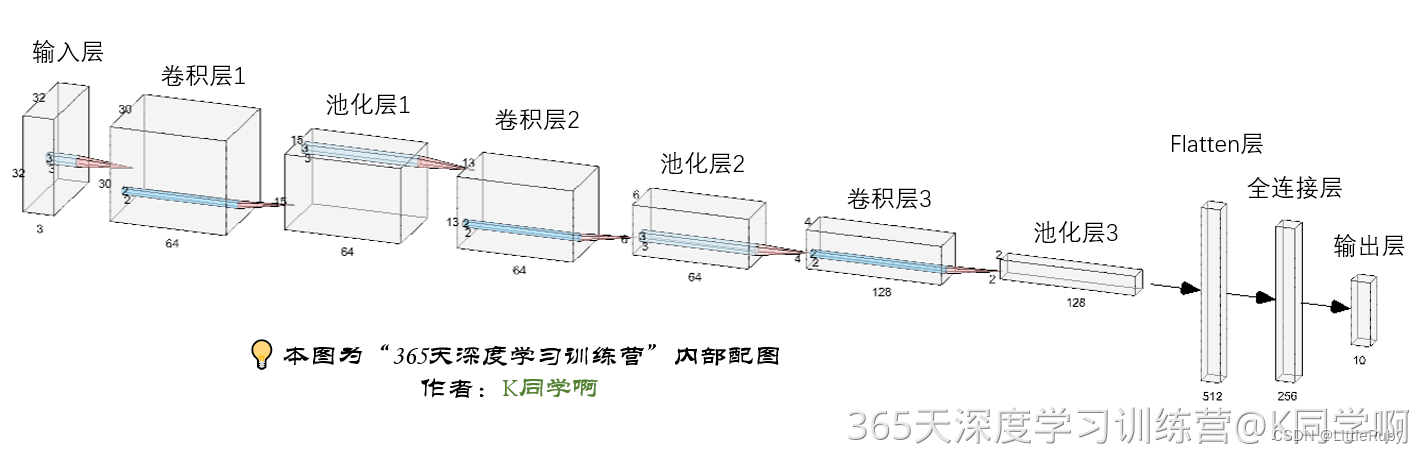
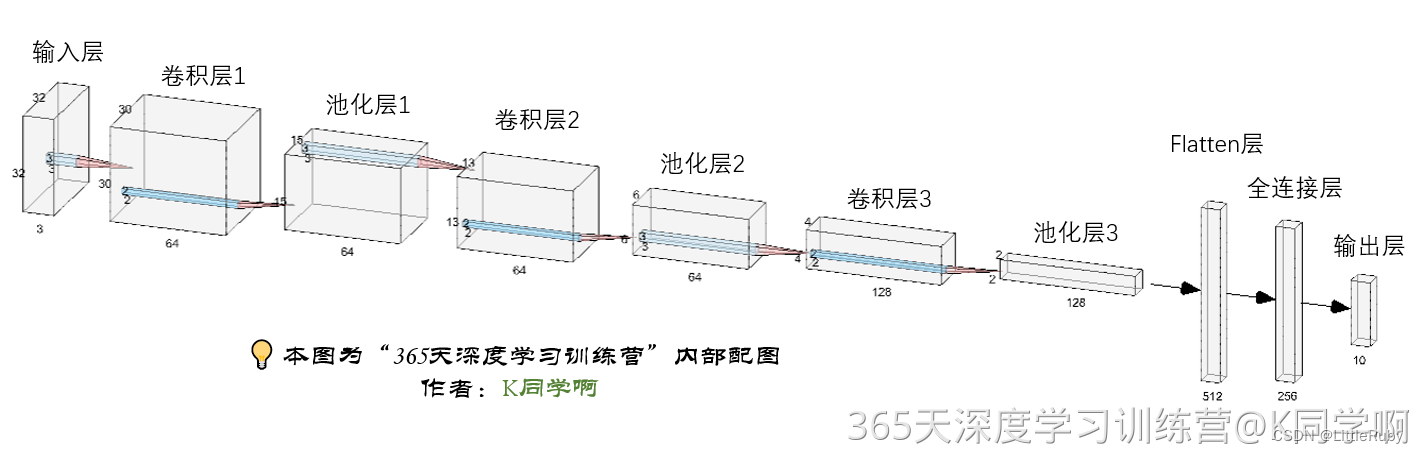
下面的網絡數據shape變化過程為:
3, 32, 32(輸入數據)
-> 64, 30, 30(經過卷積層1)-> 64, 15, 15(經過池化層1)
-> 64, 13, 13(經過卷積層2)-> 64, 6, 6(經過池化層2)
-> 128, 4, 4(經過卷積層3) -> 128, 2, 2(經過池化層3)
-> 512 -> 256 -> num_classes(10)
參看文章深度學習CNN網絡–卷積層、池化層、全連接層詳解與其參數量計算可手動推導這個過程。
網絡結構圖(可單擊放大查看):
3.2. torch.nn網絡訓練相關函數optimizer.zero_grad()、loss.backward()、optimizer.step()詳解
3.2.1 optimizer.zero_grad()
函數會遍歷模型的所有參數,通過內置方法截斷反向傳播的梯度流,再將每個參數的梯度值設為0,即上一次的梯度記錄被清空。
3.2.2 loss.backward()
PyTorch的反向傳播(即tensor.backward())是通過autograd包來實現的,autograd包會根據tensor進行過的數學運算來自動計算其對應的梯度。
具體來說,torch.tensor是autograd包的基礎類,如果你設置tensor的requires_grads為True,就會開始跟蹤這個tensor上面的所有運算,如果你做完運算后使用tensor.backward(),所有的梯度就會自動運算,tensor的梯度將會累加到它的.grad屬性里面去。
更具體地說,損失函數loss是由模型的所有權重w經過一系列運算得到的,若某個w的requires_grads為True,則w的所有上層參數(后面層的權重w)的.grad_fn屬性中就保存了對應的運算,然后在使用loss.backward()后,會一層層的反向傳播計算每個w的梯度值,并保存到該w的.grad屬性中。
如果沒有進行tensor.backward()的話,梯度值將會是None,因此loss.backward()要寫在optimizer.step()之前。
3.2.3 optimizer.step()
step()函數的作用是執行一次優化步驟,通過梯度下降法來更新參數的值。因為梯度下降是基于梯度的,所以在執行optimizer.step()函數前應先執行loss.backward()函數來計算梯度。
注意:optimizer只負責通過梯度下降進行優化,而不負責產生梯度,梯度是tensor.backward()方法產生的。
3.3 opencv、matplotlib、pillow和pytorch讀取數據的通道順序
- opencv(imread,imshow):uint8的ndarray數據,通道順序hwc,顏色通道BGR。
- matplotlib(imread,imshow):uint8的ndarray數據,通道順序hwc,顏色通道RGB。
- pillow(open,show):自己的數據結構。可以np.array(image)轉換成numpy數組:uint8的ndarray數據,通道順序hwc,顏色通道RGB。可以Image.fromarray(image)將numpy數組類型轉化為pillow類型。
- pythorch(torchvision.datasets、torch.utils.data.DataLoader及torchvision.io.read_image):ToTensor()到[0, 1]的torch數據,通道順序nchw,顏色通道RGB,查看圖片方法及ToPILImage。
總結:除了pytorch得到的是nchw圖片,其余方法得到的都是hwc圖片;除了cv2得到的c是bgr圖片,其余方法得到的c都是rgb圖片;plt.imshow()既可以顯示(H,W)灰色圖片,也可以顯示(H,W,C=3)的numpy或torch類型的RGB圖片,但nhwc某批次里的圖片只能一張一張顯示.
總結
通過本文的學習,對torch.nn常用網絡層Conv2d、Linear和MaxPool2d有了更深的了解。




)
)
)












![[Spring~源碼] ControllerAdvice揭秘](http://pic.xiahunao.cn/[Spring~源碼] ControllerAdvice揭秘)