方式一, 利用已經有的bsp進行創建
距離BearPi IOT Std 板
1. 下載 RT-Thread 官方 Env工具a. 下載 [Env 工具下載](https://www.rt-thread.org/download.html#download-rt-thread-env-tool) , 并解壓縮b. 將env注冊到系統中, 這樣就在右鍵菜單中出現,方便使用雙擊打開env解壓縮目錄下 的env.bat,窗體上邊欄空白處右鍵->Settings->如下圖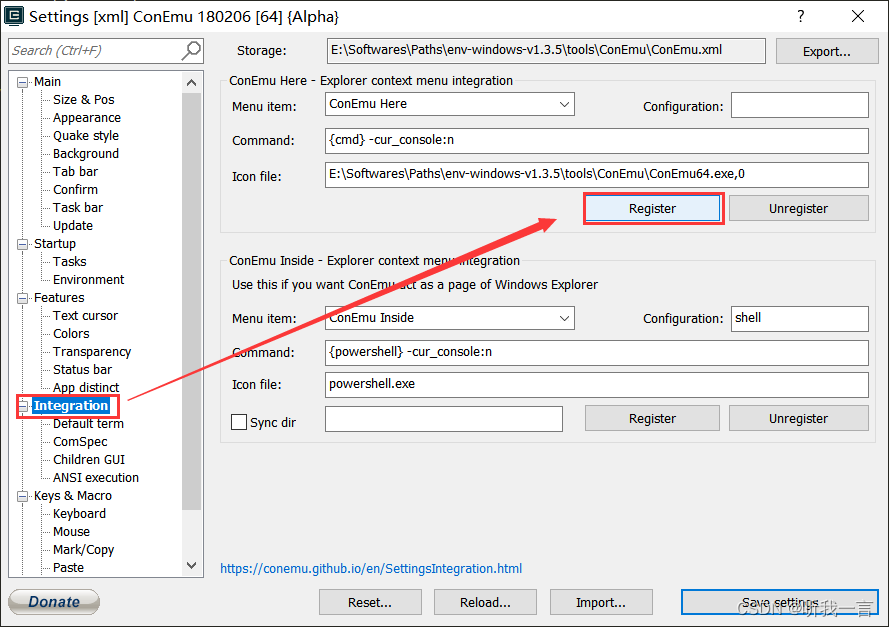
2. RT-Thread 源碼 下載git clone https://gitee.com/rtthread/rt-thread.git 3. 生成新項目支持在下載的rt-thread 源碼目錄 /bsp/stm32/stm32l431-BearPi目錄下右鍵打開env輸入menuconfig 更新你的設置, 更新完之后 EXIT退出輸入scons --target=mdk5 更新項目配置4. 打開項目并使用串口工具查看輸出/bsp/stm32/stm32l431-BearPi, 目錄下的工程在Keil下打開, 并編譯燒錄到板中
方式二, 方式一擴展,獨立目錄
-
將 Bsp單獨拷貝出來
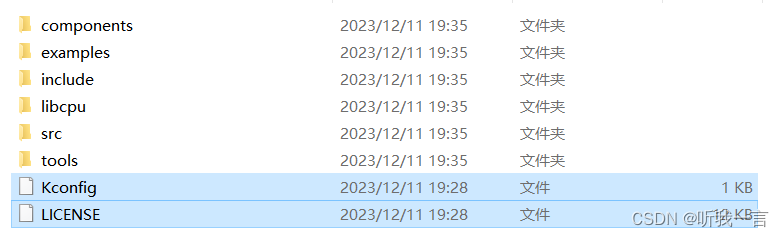
rt-thread\bsp\stm32\stm32l431-BearPi 這個目錄拷貝出來
最開始目錄列表如下
-
將底層支持庫 和 rt-thread庫一起拷貝過來
rt-thread\bsp\stm32\libraries 目錄下, 只拷貝
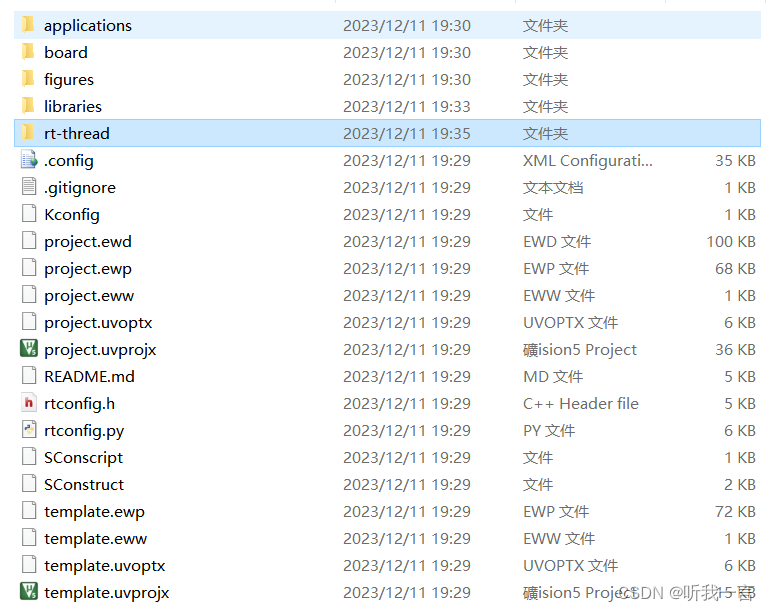
創建目錄rt-thread 將主目錄下rt-thread的源代碼目錄都拷貝過來
最后的目錄如下
-
修改Kconfig
stm32l431-BearPi/Kconfig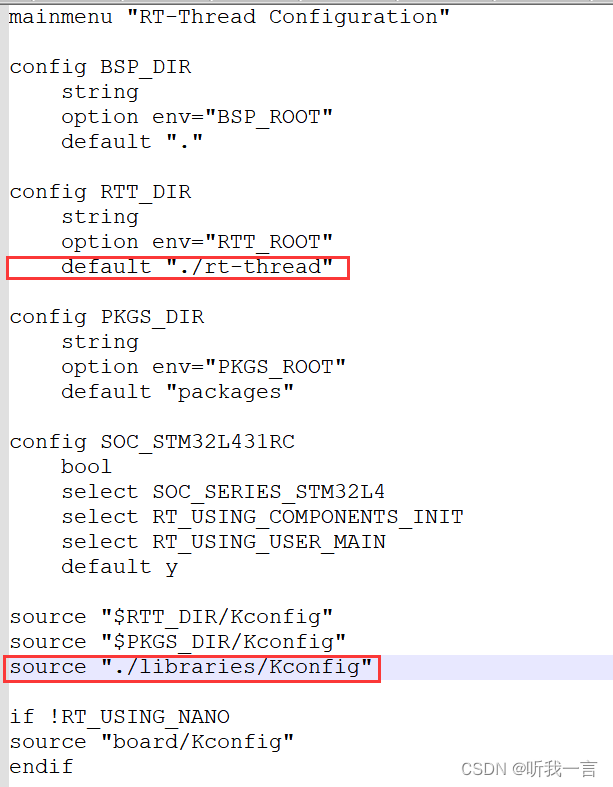
執行menuconfig 重新配置報錯
menuconfig
Kconfig:3?? environment variable BSP_ROOT undefined
Kconfig:8?? environment variable RTT_ROOT undefined
board/Kconfig:144: can’t open file “./…/libraries/HAL_Drivers/drivers/Kconfig”
同樣修改 stm32l431-BearPi/board/Kconfig 第 144行, 將libraries路徑修正為 “$BSP_DIR/libraries/HAL_Drivers/drivers/Kconfig”
再次menuconfig 執行完畢, 菜單界面Tab鍵直接到Exit退出
scons --target=mdk5 -s 報錯
scons --target=mdk5 -s
Cannot found RT-Thread root directory, please check RTT_ROOT
設置RTT_ROOT路徑,SConstruct中添加如下代碼
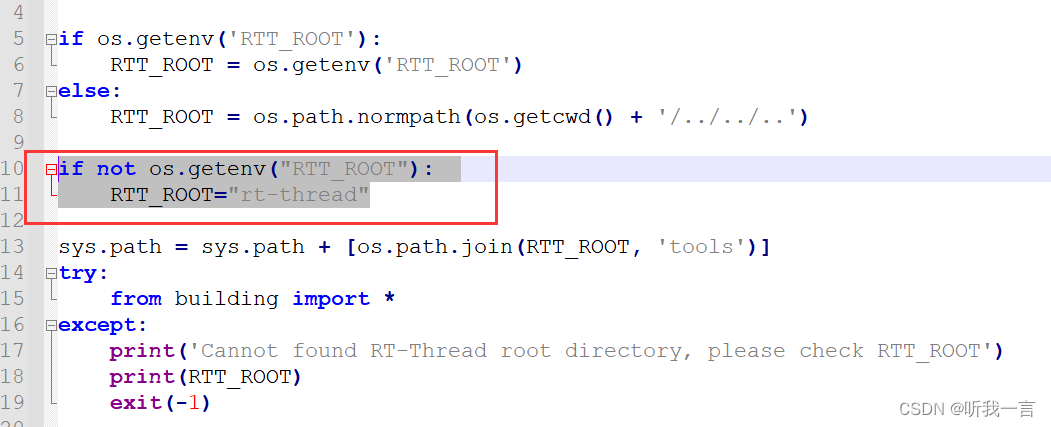
成功!
- Keil打開并編譯 和 燒錄到開發板執行


———前端開發與后端開發有什么區別)



知識點總結)
———MySQL 刪除數據表)
![neuq-acm預備隊訓練week 8 P8794 [藍橋杯 2022 國 A] 環境治理](http://pic.xiahunao.cn/neuq-acm預備隊訓練week 8 P8794 [藍橋杯 2022 國 A] 環境治理)

)







 Command Line)
>--案例(五點一))