#Apollo開發者#
學習課程的傳送門如下,當您也準備學習自動駕駛時,可以和我一同前往:
?《自動駕駛新人之旅》免費課程—> 傳送門
《Apollo 社區開發者圓桌會》免費報名—>傳送門
文章目錄
前言
分類
目標檢測
語義分割
實例分割
全景分割
總結
前言
????????見《自動駕駛學習筆記(十二)——定位技術》
????????見《自動駕駛學習筆記(十三)——感知基礎》
????????見《自動駕駛學習筆記(十四)——感知算法》
????????見《自動駕駛學習筆記(十五)——交通燈識別》
????????見《自動駕駛學習筆記(十六)——目標跟蹤》
????????計算機視覺識別常見的任務類型有:目標分類、目標檢測、語義分割、實例分割和全景分割等。
分類
????????分類(Classification)是圖片級別的任務,識別圖片中的物體類別,示例如下。

目標檢測
????????目標檢測(Object Detection)是物體級別的任務,識別物體類別,同時用BoundingBox來表示物體的位置,示例如下。2D目標檢測的算法有YOLO系列、RCNN系列等。3D目標檢測的算法有SMOKE、FCOS3D等。

語義分割
????????語義分割(Semantic Segmentation)是像素級別的任務,識別物體類別(不區分個體),示例如下。自動駕駛中用到的算法有freespace,其他領域用到的算法有FCN、UNet、Enet等。

實例分割
????????實例分割(Instance Segmentation)是像素級別的任務,包含了目標檢測和語義分割,可區分個體,示例如下。常用的算法有MaskRCNN、自動駕駛車道線檢測SCNN、PINet等。

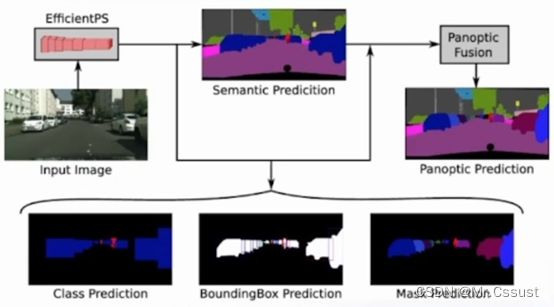
全景分割
????????全景分割(Panoptic segmentation),是未來的一種研究方向,是像素級別的任務,包含語義標簽和實例ID,可數目標和不可數目標都可以應對,示例如下。
總結
????????以上就是本人在學習自動駕駛時,對所學課程的一些梳理和總結。后續還會分享另更多自動駕駛相關知識,歡迎評論區留言、點贊、收藏和關注,這些鼓勵和支持都將成文本人持續分享的動力。
????????另外,如果有同在小伙伴,也正在學習或打算學習自動駕駛時,可以和我一同抱團學習,交流技術。
????????版權聲明,原創文章,轉載和引用請注明出處和鏈接,侵權必究!
????????文中部分圖片來源自網絡,若有侵權,聯系立刪。





![[足式機器人]Part4 南科大高等機器人控制課 Ch05 Instantaneous Velocity of Moving Frames](http://pic.xiahunao.cn/[足式機器人]Part4 南科大高等機器人控制課 Ch05 Instantaneous Velocity of Moving Frames)

)

)

——邊緣識別之Scharr算法的實例代碼)







