#Apollo開發者#
學習課程的傳送門如下,當您也準備學習自動駕駛時,可以和我一同前往:
?《自動駕駛新人之旅》免費課程—> 傳送門
《Apollo 社區開發者圓桌會》免費報名—>傳送門
文章目錄
前言
匹配關聯
軌跡記錄
狀態預測
總結
前言
??????? 見《自動駕駛學習筆記(十一)——高精地圖》
????????見《自動駕駛學習筆記(十二)——定位技術》
????????見《自動駕駛學習筆記(十三)——感知基礎》
????????見《自動駕駛學習筆記(十四)——感知算法》
????????見《自動駕駛學習筆記(十五)——交通燈識別》
????????自動駕駛中的目標跟蹤流程如下圖所示:

匹配關聯
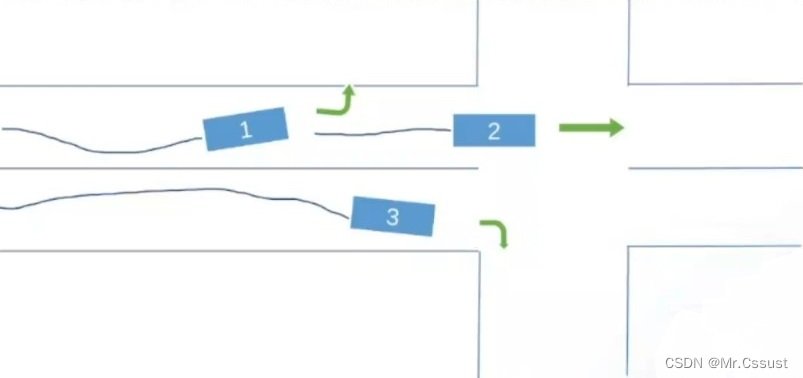
????????匹配關聯的主要目的是:根據運動目標相關的特征值,將障礙物序列中連續幀的同一運動目標關聯起來,得到每頓數據中目標的運動參數,以及相鄰幀間目標的對應關系。
????????相鄰兩個計算周期內檢測到的目標示例如下:

????????以目標的類型、大小、位置等特征值,使用匈牙利算法進行匹配,示例如下:

????????障礙物匹配結果如下:
| 前一幀 | 后一幀 |
| 1 | b |
| 2 | c |
| 3 | a |
| 4 | 消失 |
| / | 新增d |
軌跡記錄
????????根據相鄰幀間目標的對應關系,把每個時刻串聯起來,從而得到障礙物完整的運動軌跡,示例如下。

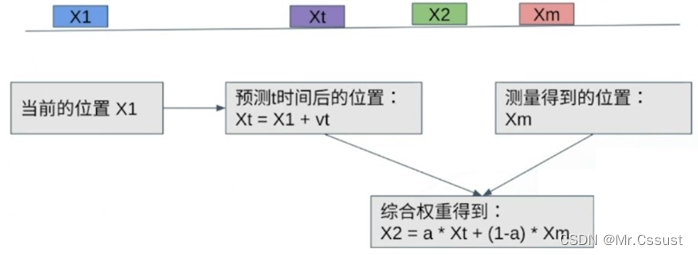
狀態預測
????????根據目標的軌跡可以計算得到航向,再根據軌跡中每個點的時間戳,可以計算得到目標速度和加速度等狀態信息。
????????預測得到的目標狀態信息可用于卡爾曼濾波算法更新運動狀態,也可用于目標未來走向的預測,示例如下:
總結
????????以上就是本人在學習自動駕駛時,對所學課程的一些梳理和總結。后續還會分享另更多自動駕駛相關知識,歡迎評論區留言、點贊、收藏和關注,這些鼓勵和支持都將成文本人持續分享的動力。
????????另外,如果有同在小伙伴,也正在學習或打算學習自動駕駛時,可以和我一同抱團學習,交流技術。
????????版權聲明,原創文章,轉載和引用請注明出處和鏈接,侵權必究!
????????文中部分圖片來源自網絡,若有侵權,聯系立刪。
)
)
)

)

。Javaee項目,springboot項目。)

)
)
)



———HTTP 緩存機制)



之燈光和陰影(源碼))
