- 實驗目的
?磁盤是可供多個進程共享的設備,當有多個進程都要求訪問磁盤是,應采用一種最佳調度算法,以使各進程對磁盤的平均訪問時間最小。目前最成用的磁盤調度算法有先來先服務(FCFS),最短尋道時間優先(SSTF),以及掃描算法(SCAN)。通過本實驗可以加深理解有關磁盤調度的目標,并體會和了解最短尋道時間優先算法和掃描算法的具體實施辦法。
- 實驗內容
1 從100#磁道開始,被訪問的磁道號分別為:55,58,39,18,90,160,150,38,184。
2 要求用最短尋道時間優先算法的和掃描算法實現磁盤調度。
3 記錄下每訪問一個磁道磁頭移動的磁道數,并計算平均尋道長度(平均移動磁道數)。,,
- 實驗要求
分別用兩種算法實現磁盤調度。在實驗結果分析中,將比較結果以列表的形式表現出來。用數組(或鏈表)TR[ ]存儲待訪問磁道號,將每次磁頭移動磁道數用數組AR[ ] 存儲。輸出結果應如下例:(注意空格)
| 150 | 50 |
| 160 | 10 |
| ,184 | 24 |
| 18,, | 166 |
| 38 | 20 |
| 39 | 1 |
| 55 | 16 |
| 58 | 3 |
| 90 | 32 |
| 平均尋道長度:35.8 | |
- 編程工具:
C++語言平臺(DevC++開發工具)
五、
(1)問題概述
- 磁盤調度算法的目的是優化磁盤I/O操作,減少磁頭移動距離,從而提高磁盤I/O效率。
- 常見的磁盤調度算法包括:先來先服務(FCFS)算法、最短尋道時間優先(SSTF)算法、輪轉優先(SCAN)算法、最少最近使用(LRU)算法等。
- FCFS算法按請求到達順序依次處理請求,簡單但效率低下。SSTF算法選擇離當前磁頭位置最近的請求處理,可以減少磁頭移動但難以實現。
- SCAN算法將磁盤劃分為多個區,依次掃描每個區處理請求,減少磁頭移動但響應時間長。LRU算法優先處理最近最久未使用的磁盤塊,需要記錄使用信息增加開銷。
(2)整體功能及設計
通過構建最短尋道時間優先算法函數、構建掃描算法函數,然后將創作主函數循環調用,并能夠輸出調度過程以及平均尋道長度。
(3)編程實現(附代碼和截圖)
#include<stdio.h>
#include<math.h>
#include<stdlib.h>
#include<algorithm>
using namespace std;
//55 58 39 18 90 160 150 38 184
void SSTF(int a[], int n) {//最短尋道時間優先調度int site = 1;//確定開始磁道中間位置int m, Left, Right;int i, j, sum = 0;double Average=0;int Temp; sort(a, a + n);//對磁道號進行從小到大排列printf("排序后磁道數組如下:\n");for (i = 0; i < n; i++) //輸出排序后的磁道號數組printf("%d ", a[i]);printf("\n請輸入開始的磁道號: ");scanf("%d", &m);printf("\nSSTF(最短尋道優先)調度過程如下: \n");printf("\n被訪問的下一個磁道號 移動距離(磁道數)\n"); int mark = m;//用來計算差值或移動距離if (a[n - 1] <= m)//整個數組里的數都小于開始磁道號的情況{for (i = n - 1; i >= 0; i--) { //將數組磁道號就逆序輸出printf("%10d ---------------------- %-3d\n", a[i], mark - a[i]);mark = a[i];}sum = m - a[0];}else if (a[0] >= m)//整個數組里的數都大于開始磁道號的情況{for (i = 0; i < n; i++) { //將磁道號從小到大順序輸出printf("%10d ---------------------- %-3d\n", a[i], a[i] - mark);mark = a[i];}sum = a[n - 1] - m;}else{while (a[site] < m)//找位置{site++;}Left = site - 1;Right = site;//確定開始磁道在已排的序列中的位置while ((Left >= 0) && (Right < n)){if ((m - a[Left]) <= (a[Right] - m))//找最短距離是在左側還是右側{printf("%10d ---------------------- %-3d\n", a[Left], mark - a[Left]);mark = a[Left];sum += m - a[Left];m = a[Left];Left = Left - 1;}else//在右側{printf("%10d ---------------------- %-3d\n", a[Right], a[Right] - mark);mark = a[Right];sum += a[Right] - m;m = a[Right];Right = Right + 1;}}if (Left = -1){for (j = Right; j < n; j++)//順序輸出 {printf("%10d ---------------------- %-3d\n", a[j], a[j] - mark);mark = a[j];}sum += a[n - 1] - a[0];}else{for (j = Left; j >= 0; j--)//逆序輸出 {printf("%10d ---------------------- %-3d\n", a[j], mark - a[j]);mark = a[j];}sum += a[n - 1] - a[0];}}printf("\n");Average = (double)sum / n;printf(" 可見平均尋道的長度為: %.2f \n", Average);
}void SCAN(int a[], int n) {///掃描算法或電梯調度算法int i, j, sum = 0;double Average;for (i = 0; i < n; i++){sort(a, a + n);//升序排序}printf("排序后的磁道數組如下:\n");for (i = 0; i < n; i++){printf("%d ", a[i]);}printf("\n請輸入開始的磁道號: ");int m;scanf("%d", &m);printf("\nSCAN(掃描或電梯)調度過程如下:\n");printf("\n被訪問的下一個磁道號 移動距離(磁道數)\n"); int pointer;int mark = m;for (i = 0; i < n; i++){if (a[i] >= m)//找到比開始磁道號大的數 {pointer = i;sum += abs(a[i] - m);break;}}for (i = pointer; i < n; i++){if (i != pointer)//順著磁頭方向順序輸出 sum += abs(a[i] - a[i - 1]);printf("%10d ---------------------- %-3d\n", a[i], a[i] - mark);mark = a[i];}if (pointer >= 1)sum += abs(a[n - 1] - a[pointer - 1]);for (i = pointer - 1; i >= 0; i--)//逆著磁頭方向順序輸出 {if (i)sum += abs(a[i] - a[i - 1]);printf("%10d ---------------------- %-3d\n", a[i], mark - a[i]);mark = a[i];}Average = (double)sum / n;printf("\n 平均尋道的長度為:%.2f\n", Average);
}
int main() {int track[100];//定義磁道號數組int select;int i = 0;int n;printf("請先輸入磁道數量: \n");scanf("%d", &n);printf("請先輸入磁道序列: \n");for (i = 0; i < n; i++){scanf("%d", &track[i]);}printf("\n");while (1){printf("1.最短尋道時間優先算法(SSTF) \n");printf("2.掃描算法(SCAN)\n");printf("3.退出\n");printf("\n");printf("請選擇要使用的調度算法: ");scanf("%d", &select);switch (select)//算法選擇{case 1:SSTF(track, n);//最短服務時間優先算法printf("\n");break;case 2:SCAN(track, n);//掃描算法printf("\n");break;case 3:exit(0);}}return 0;
}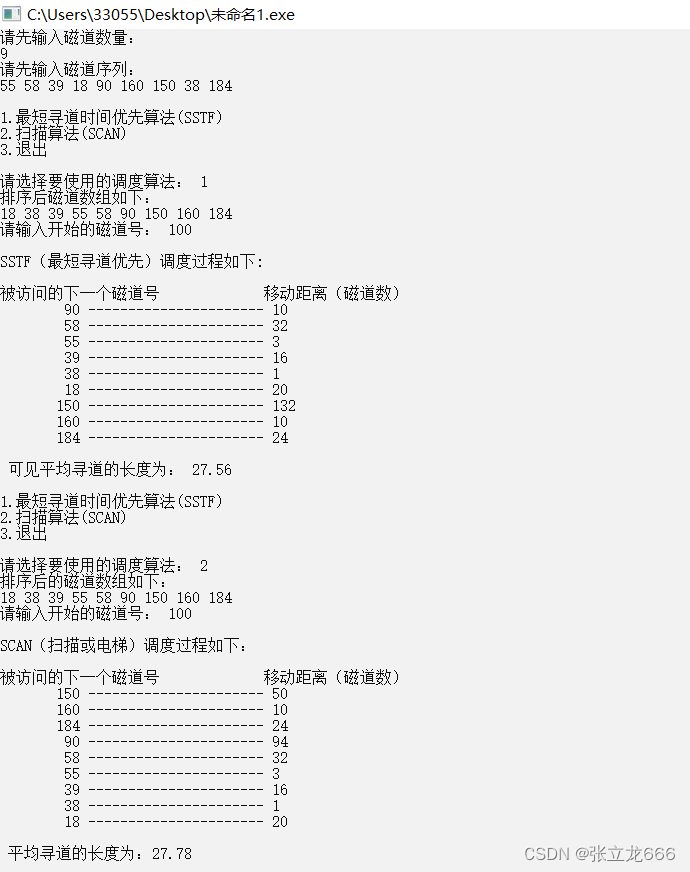
(4)使用說明
輸入磁道數量、輸入磁道序列、然后回車根據菜單選擇相應的調度算法。
(5)結果分析
1. 最短尋道時間優先算法(Shortest Seek Time First, SSTF)
- 優點:能有效減少磁頭移動距離,從而減少平均I/O等待時間。
- 缺點:可能導致 starvation,后來請求的I/O等待時間可能很長。
2. 掃描算法(SCAN)
- 優點:能較好避免 starvation 問題,后來請求不會等待過長時間。
- 缺點:磁頭移動距離可能較大,平均I/O等待時間較長。
3. 對比分析:
- SSTF算法在減少磁頭移動距離上優于SCAN算法,平均I/O等待時間可能較短。
- 但SSTF可能出現一個請求等待時間特別長的情況,不如SCAN在公平性上。
- SSTF更依賴請求分布,如果請求分布不均勻,性能下降明顯。
- SCAN算法性能更穩定,不易受請求分布影響。但移動距離較大,平均等待時間較長。
4. 綜上,在I/O等待時間優先的場景下,SSTF算法效果較好;在公平性和穩定性要求較高的場景,SCAN算法更適用。
5. 實際使用中,也可以根據負載動態調整兩種算法,兼顧等待時間和公平性的優點。
所以兩種算法各有優劣,需要根據實際場景具體選擇或結合使用,以達到最佳磁盤調度效果。
(6)設計體會
操作系統磁盤調度算法設計和實現給我帶來以下幾點體會:
1. 磁盤調度算法直接影響系統I/O性能,是操作系統優化的重要一環。不同算法在不同場景下會有很大差異。
2. 算法設計需要考慮公平性、等待時間、移動距離等多方面因素,難度較大。一個好的算法需要兼顧各項指標。
3. 實際系統I/O請求模式復雜,簡單的算法在實際中效果可能不如預期。需要結合負載動態調整策略。
4. 算法實現需要考慮多磁盤和多請求并發場景,數據結構和同步機制的設計很重要。
5. 不同算法在不同系統和應用場景下性能也會有差異。需要通過實驗對比分析不同參數和場景下的優劣。
7. 算法是一個需要不斷優化和更新的模塊。需要提供良好的擴展接口支持后期升級。
8. 理解主流算法原理和思路,對設計和優化自己的算法很有幫助。
9. 磁盤調度涉及操作系統、算法和性能優化多個知識點。整個設計過程讓我對系統有了更深入的認識。
總體來說,磁盤調度算法設計是一個系統性和實踐性很強的學習過程,給我帶來很多收獲。它也反映了操作系統研發需要考慮的各個方面。






)


)









