關注微?“電擊小子程高興的MATLAB小屋”獲得專屬優惠
一.SVPWM原理
????????SPWM常用于變頻調速控制系統,經典的SPWM控制主要目的是使變頻器的輸出電壓盡量接近正弦波,并未關注輸出的電流波形。而矢量控制的最終目的是得到圓形的旋轉磁場,這樣就要求變頻器輸出的電流波形接近正弦波。鎖定得到圓形的旋轉磁場這一目標,SVPWM控制技術利用逆變器各橋臂開關控制信號的不同組合,使逆變器的輸出電壓空間矢量的運行軌跡盡可能接近圓形。SVPWM是從電動機的角度出發,著眼于使電機獲得幅值恒定的圓形磁場。圖1所示為PWM逆變器的拓撲結構以及等效開關模型。

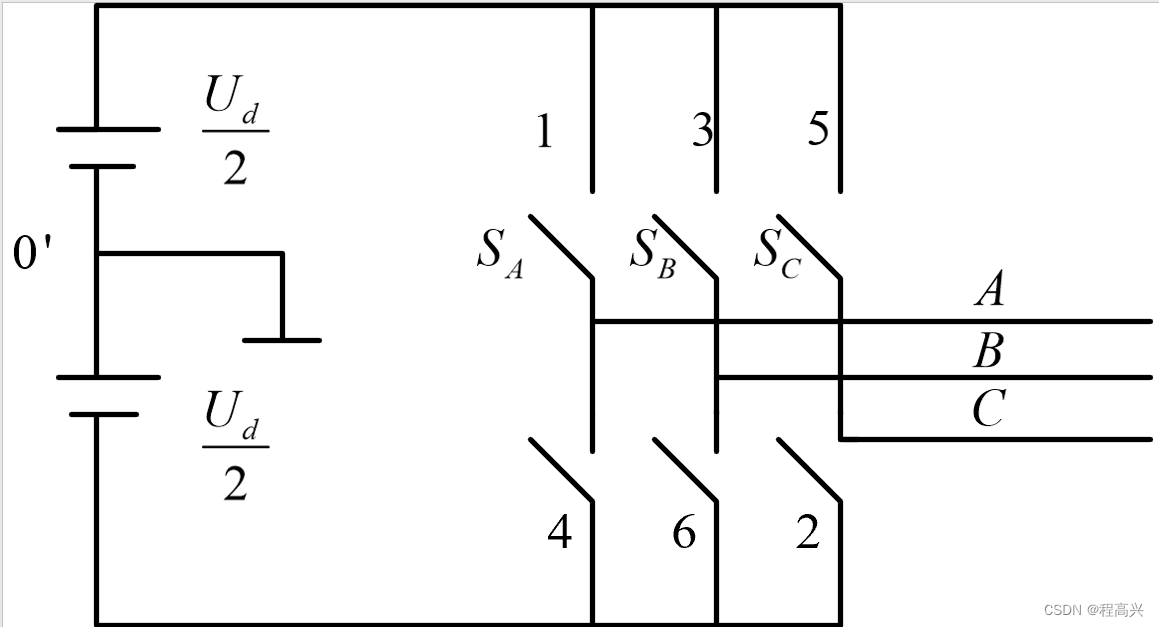
圖1 PWM逆變器電路
? ? ? ? 規定當上橋臂器件導通時橋臂狀態為1,下橋臂導通時橋臂狀態為0,當3個橋臂的功率開關管變化時,就會得到8(2的3次方)種開關模式,每種開關模式對應一個電壓矢量,矢量的幅值為2/3Ud;有兩種開關模式對應的電壓矢量幅值為零,稱為零矢量。例如:
? ? ? ? 假設V1,V2,V3導通,開關狀態為Sa=Sb=1,Sc=0,等效電路為:

?這樣,很容易就能得到該瞬時時刻的相電壓:

?將其在靜止坐標系中表示出來,如圖所示:
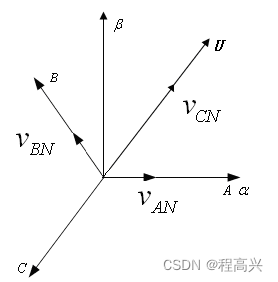
?U為合成的電壓向量,其表達式為:

若k為2/3,并將各相電壓帶入得:

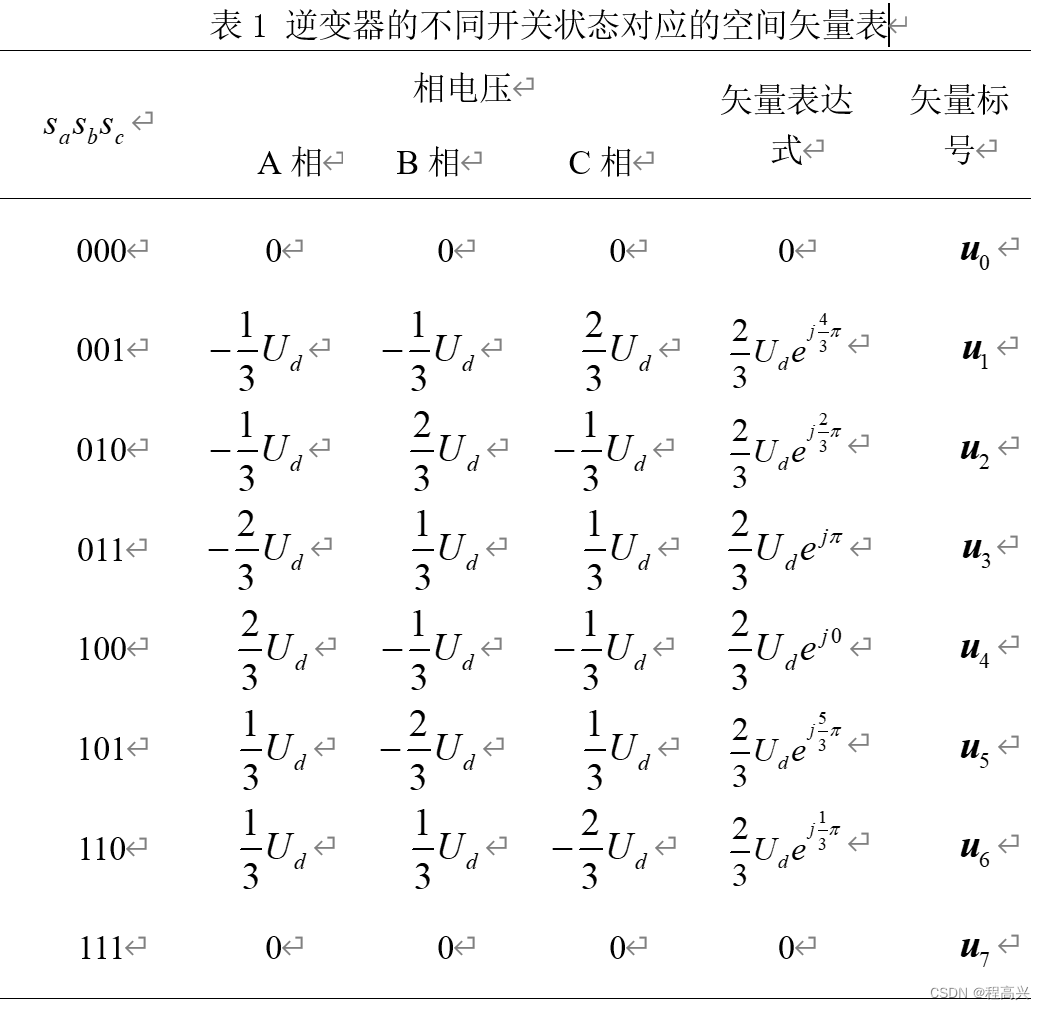
?不同得狀態對應表格:
二.MATLAB——仿真
步驟:
1.扇區判斷

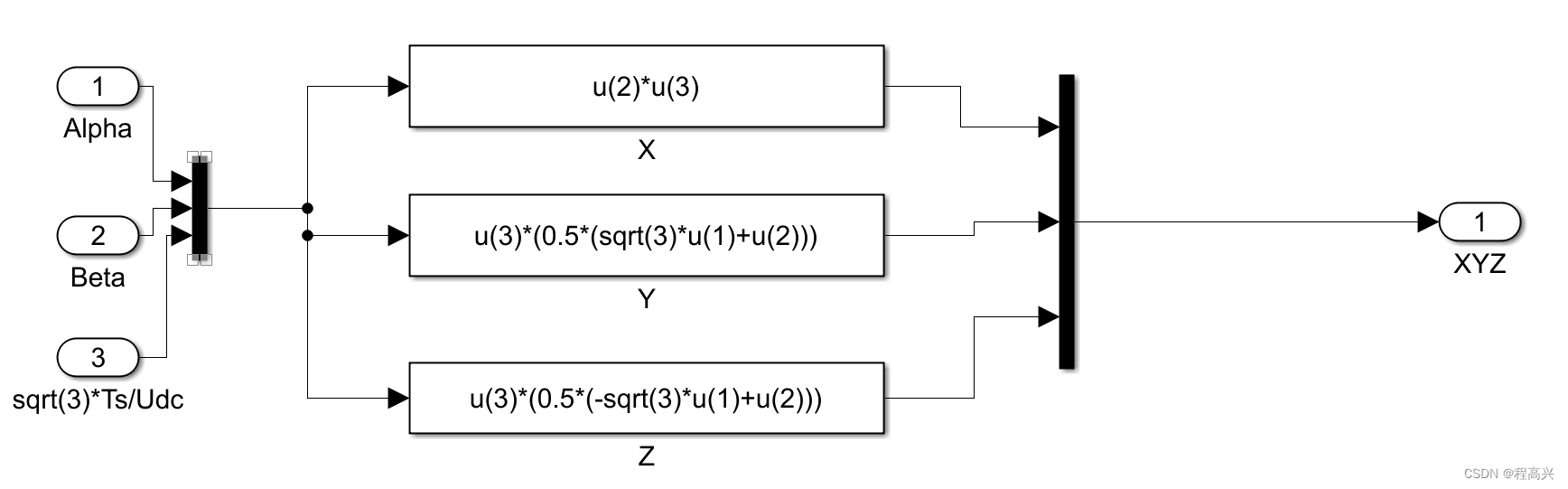
2.扇區各矢量作用時間:
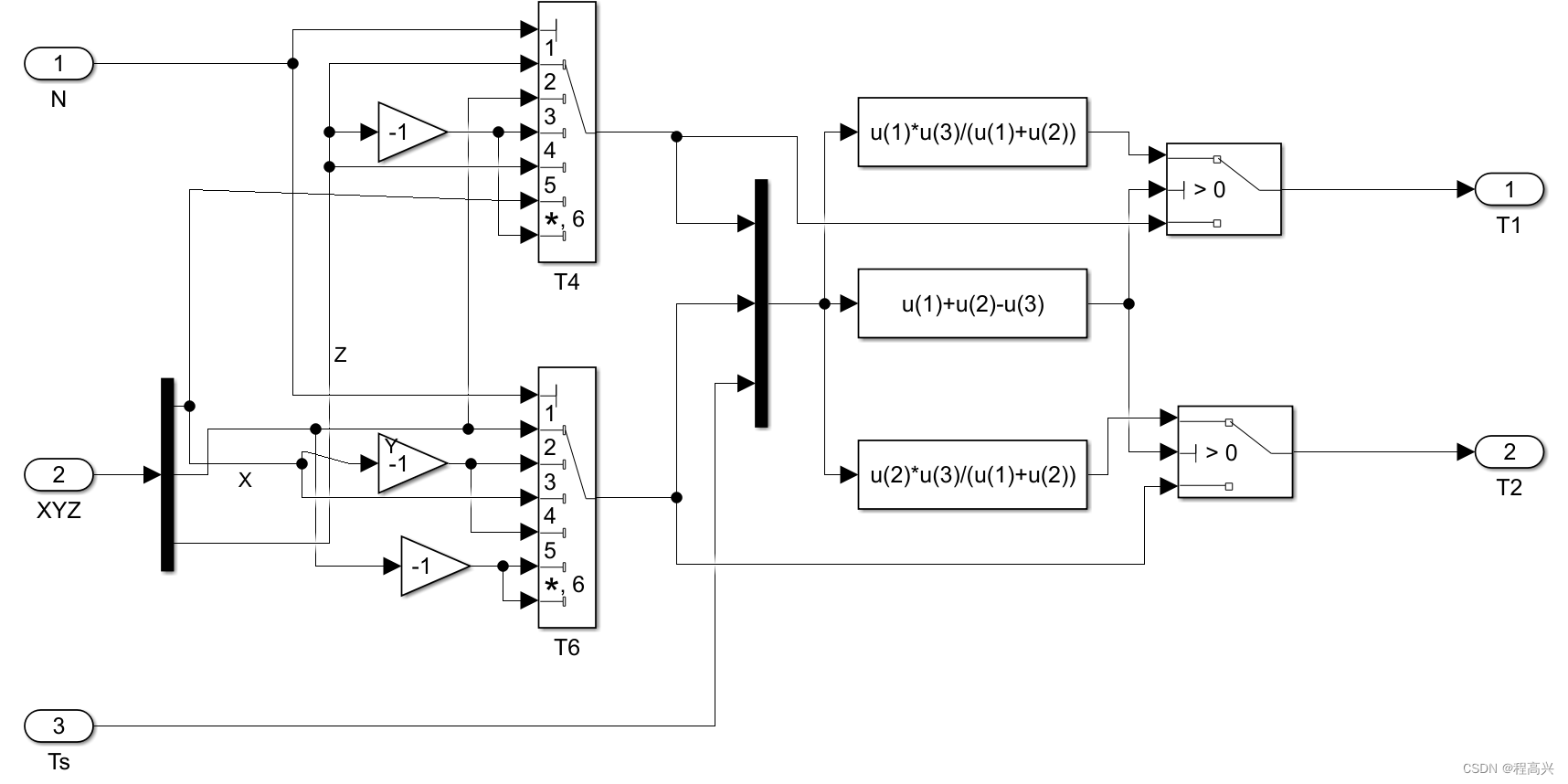
3.各扇區T1,T2作用時間以及超調處理:
4.三相電壓開關切換點:

5.PWM調制:

?6.相電壓與開關關系:

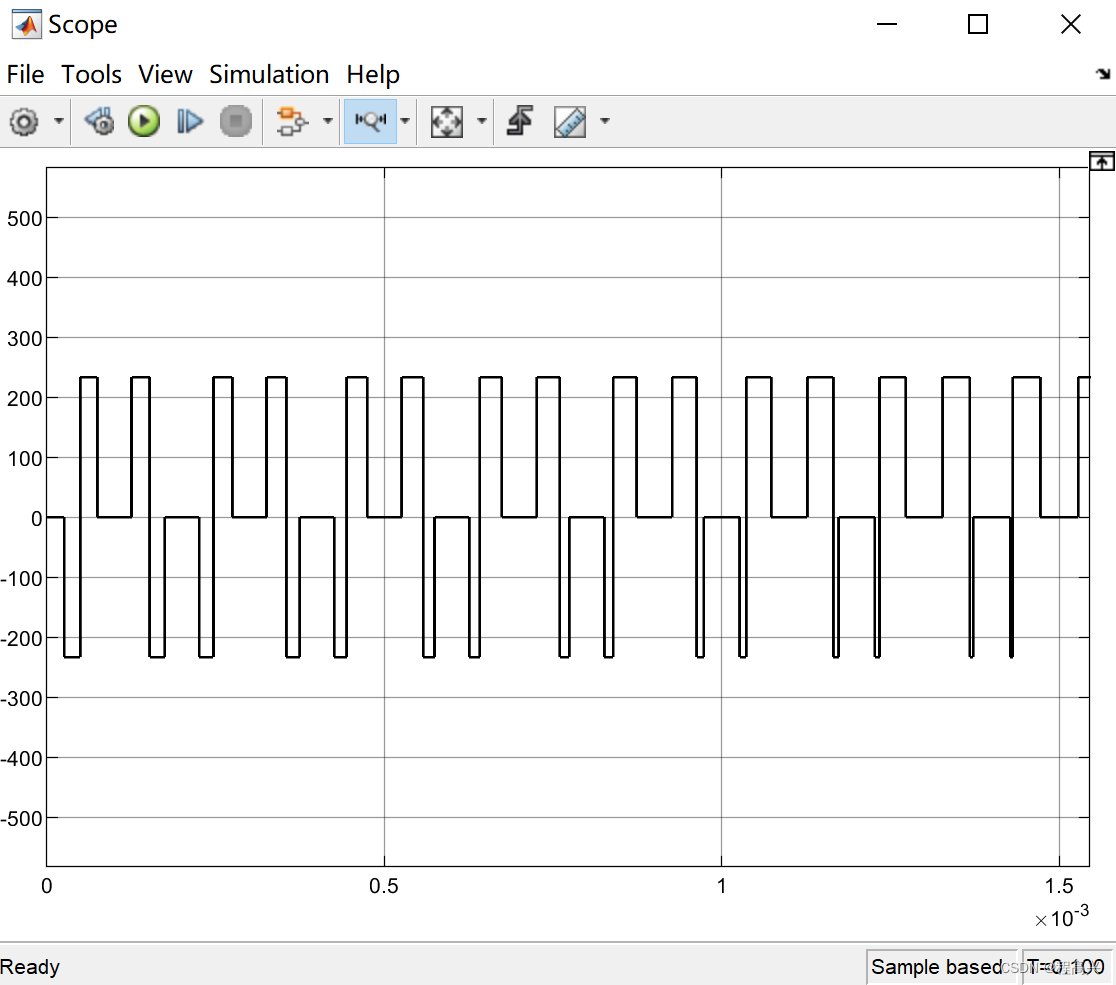
7.觀察波形?
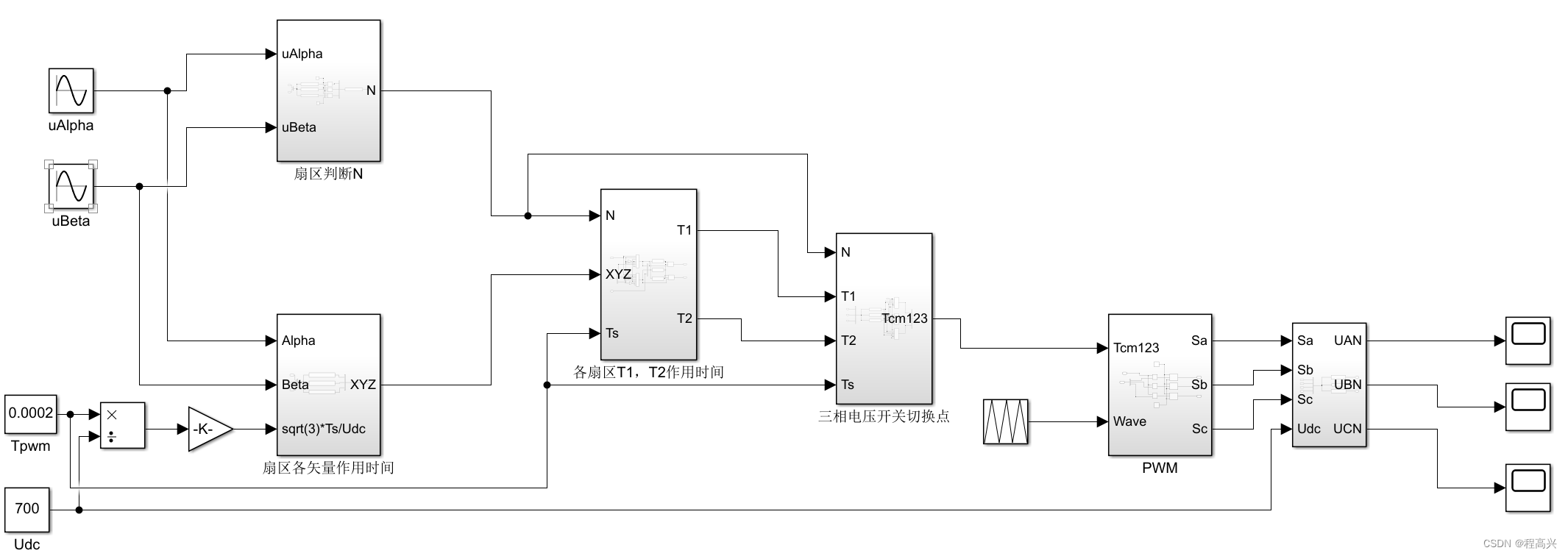
8.整體仿真模塊
”問題)



)








、apply()、bind()改變this指向的原理)

![[mysql]linux安裝mysql5.7](http://pic.xiahunao.cn/[mysql]linux安裝mysql5.7)



