大家好,今天給大家介紹stm32串口編程實例,文章末尾附有分享大家一個資料包,差不多150多G。里面學習內容、面經、項目都比較新也比較全!可進群免費領取。
串口是USART(通用同步/異步收發器)的俗稱。
實際上,串行總線并不只有USART,還包含IIC、SPI、CAN、K線、單總線、USB、485等等總線,只是因為UART用得較多,習慣上叫做“串口”。
首先來看下UART的通信模型:
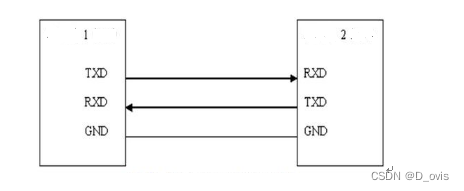
設備1與設備2進行通信
TXD:發送端,負責發送數據
RXD:接收端,負責接收數據
GND:地線,保證設備1與設備2有相同的參考電壓,保證通信的正常進行。
從模型上我們可以看出UART(USART是同步通信,在這個模型的基礎上都一條始終控制總線,但不常用)是一個異步、全雙工、串行通信。既然是異步的,那么就需要控制設備1與設備2數據收發的速度一致性,也就是兩設備要有相同的波特率(bit/s一秒鐘能傳的),否則通信會出現數據傳輸錯誤。
現在我們配置stm32的串口1,實現與PC端上的串口助手實現通信。首先查看串口的引腳、查看芯片手冊上各引腳對用的復用功能等。
以下是實現代碼,主要是實現Uart1數據的收發。
void?USART1_Config(void)
{
GPIO_InitTypeDef?GPIO_InitStructure;
USART_InitTypeDef?USART_InitStructure;
//配置時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1?|?RCC_APB2Periph_GPIOA,?ENABLE);
/*?USART1?GPIO?config?*/
/*?Configure?USART1?Tx?(PA.09)?as?alternate?function?push-pull?*/
GPIO_InitStructure.GPIO_Pin?=?GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode?=?GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed?=?GPIO_Speed_50MHz;
GPIO_Init(GPIOA,?&GPIO_InitStructure);
/*?Configure?USART1?Rx?(PA.10)?as?input?floating?*/
GPIO_InitStructure.GPIO_Pin?=?GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode?=?GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,?&GPIO_InitStructure);
/*?USART1?mode?config?*/
USART_InitStructure.USART_BaudRate?=?115200;
USART_InitStructure.USART_WordLength?=?USART_WordLength_8b;
USART_InitStructure.USART_StopBits?=?USART_StopBits_1;
USART_InitStructure.USART_Parity?=?USART_Parity_No?;
USART_InitStructure.USART_HardwareFlowControl?=?USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode?=?USART_Mode_Rx?|?USART_Mode_Tx;
USART_Init(USART1,?&USART_InitStructure);
//使能串口中斷
USART_ITConfig(USART1,?USART_IT_RXNE,?ENABLE);
//清空發送完成標志位
USART_ClearFlag(USART1,USART_FLAG_TC);
//使能串口
USART_Cmd(USART1,?ENABLE);
}
//定義printf函數接口(printf重定向)
int?fputc(int?ch,?FILE?*f)
{
USART_SendData(USART1,?(uint8_t)?ch);
while?(USART_GetFlagStatus(USART1,?USART_FLAG_TC)?==?RESET);
return?(ch);
}
//定義scanf函數接口(scanf重定向)
int?fgetc(FILE?*f)
{
while?(USART_GetFlagStatus(USART1,?USART_FLAG_RXNE)?==?RESET);
return?(int)USART_ReceiveData(USART1);
}
//發送字符
char?usart1_putc(char?ch)
{
USART_SendData(USART1,?(uint8_t)?ch);
while?(USART_GetFlagStatus(USART1,?USART_FLAG_TXE)?!=?SET);
return?(ch);
}
//發送字符串
int?usart1_putstr(unsigned?char*?buff,int?len)
{
int?i?=?0;
for(i?=?0;i?<?len;i++)
{
usart1_putc(buff[i]);
}
return?len;
}
//接收字符
char?usart1_getc(void)
{
char?temp?=?0;
while(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)!=?SET);
temp?=?USART_ReceiveData(USART1);
return?temp;
}
//接收字符串
int?usart1_getstr(unsigned?char*?buff,int?len)
{
int?i?=?0;
for(i?=?0;i?<?len;i++)
{
buff[i]?=?usart1_getc();
}
return?len;
}
配置好之后,將這些函數放到頭文件中申明,并放到主函數中去初始化及調用,就可以實現數據的收發功能。
嵌入式物聯網需要學的東西真的非常多,千萬不要學錯了路線和內容,導致工資要不上去!
無償分享大家一個資料包,差不多150多G。里面學習內容、面經、項目都比較新也比較全!某魚上買估計至少要好幾十。
(點擊找小助理領取)掃碼進群領資料![]() https://s.pdb2.com/pages/20230519/16QijNiGb32IFIn.html
https://s.pdb2.com/pages/20230519/16QijNiGb32IFIn.html






![[JSMSA_CTF] 2023年12月練習題 pwn](http://pic.xiahunao.cn/[JSMSA_CTF] 2023年12月練習題 pwn)



)








根據距離抓取字段)