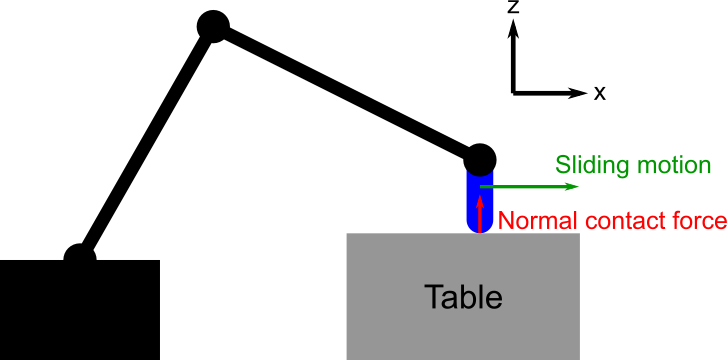
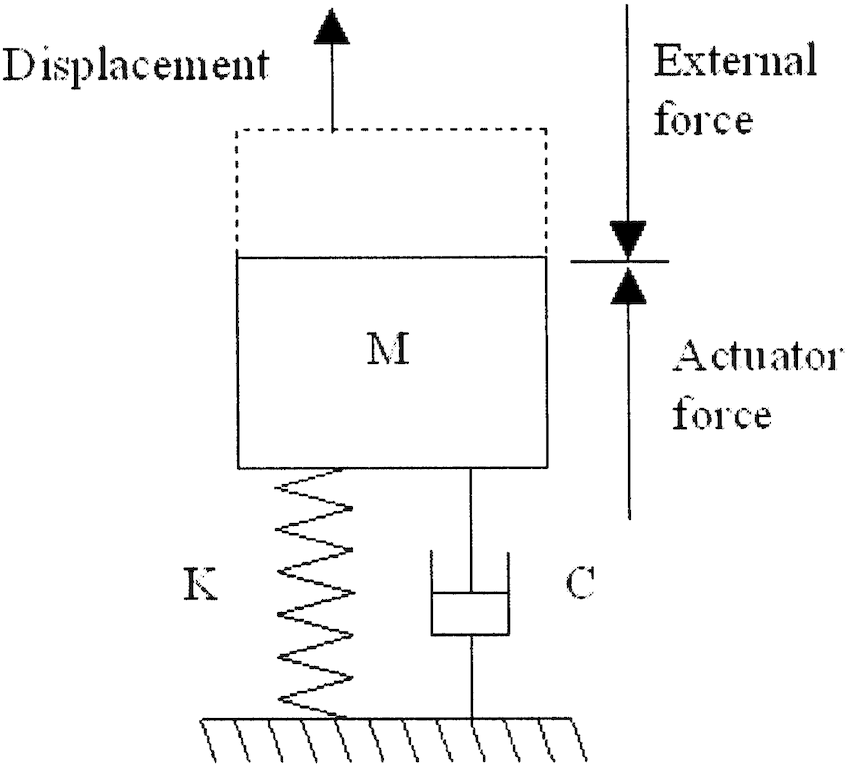
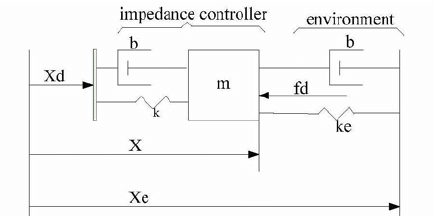
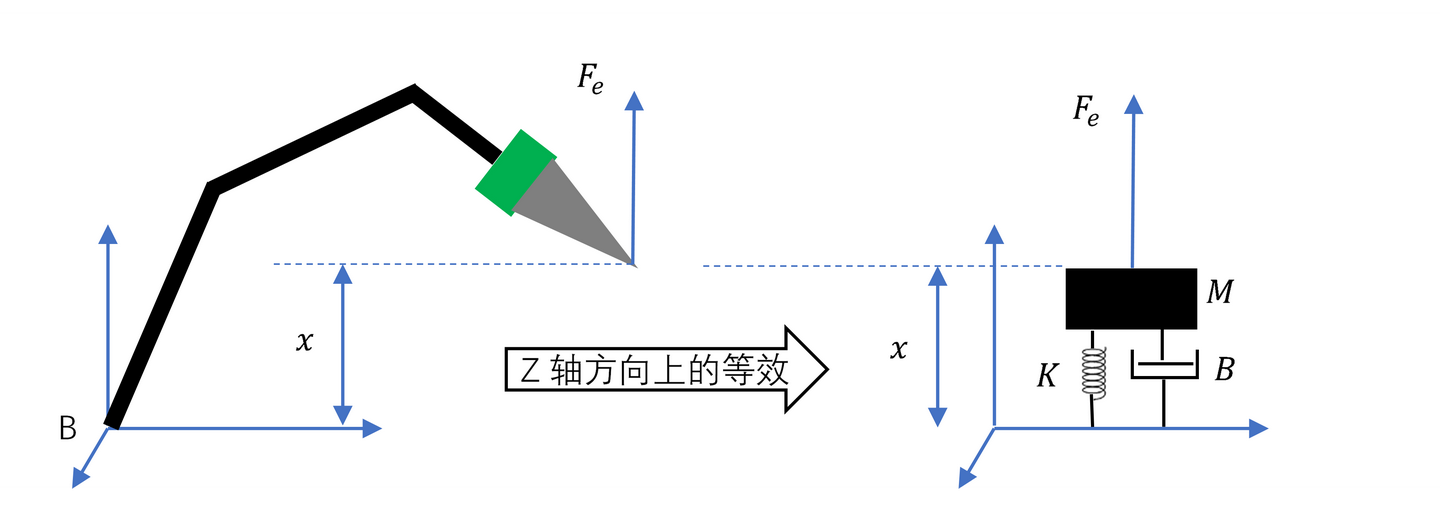
在剛性碰撞下,機器人的阻抗調節可以使其更好地適應外部環境。具體來說,通過建立力與位移之間的關系,并改變阻抗參數,可以控制機器人對外部力的響應。


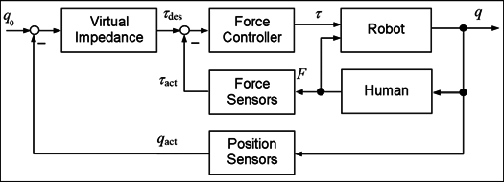
在具體實現上,可以采用基于位置的阻抗控制或基于力的阻抗控制。基于位置的阻抗控制讓機器人電機在位置模式下工作,通過發送目標位置和速度實現阻抗特性;而基于力的阻抗控制讓機器人的電機處于力矩模式工作,考慮機器人的動力學模型,直接計算出需要的力矩給驅動器。

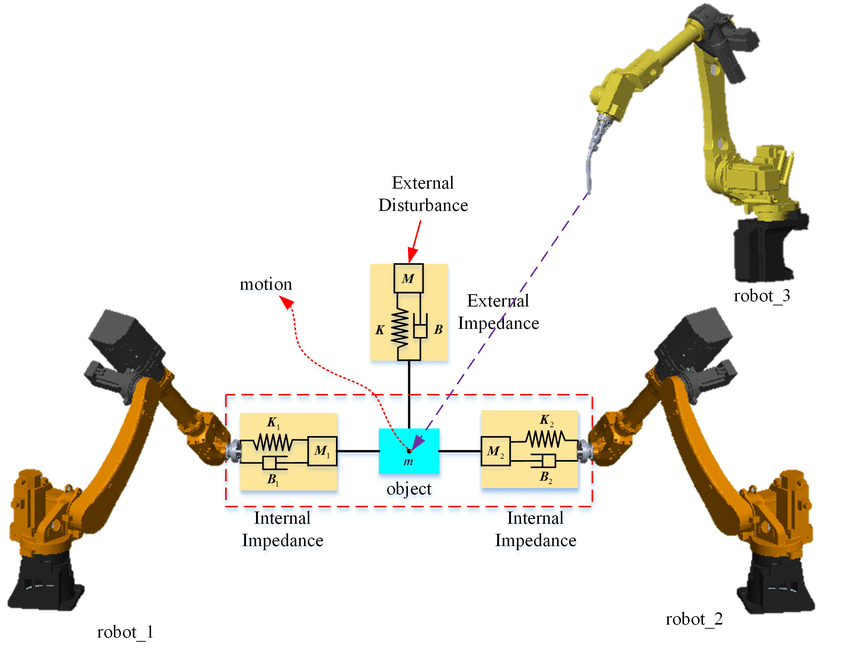
機器人阻抗控制夾取物塊的整個過程。在過程中,機器人的控制器會不斷調整阻抗模型參數,以適應不同的操作需求,并保持對物塊的穩定夾取。

通過調整機器人的阻抗參數,以實現對打磨力、接觸力和摩擦力等外部力的適應和調節,從而提高打磨質量和效率。
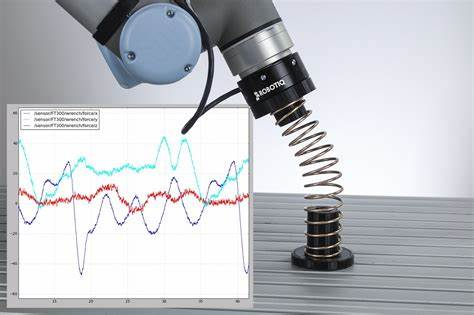
通過六維力傳感器,可以同時轉換多維力/力矩信號為電信號,并監測方向和大小不斷變化的力與力矩。這樣可以幫助控制彈簧按壓的力度和方向,從而更好地控制機器人的運動。此外,六維力傳感器還可以用于監測機器人有關部件所受外力及轉矩,以及檢測接觸力的大小和作用點等

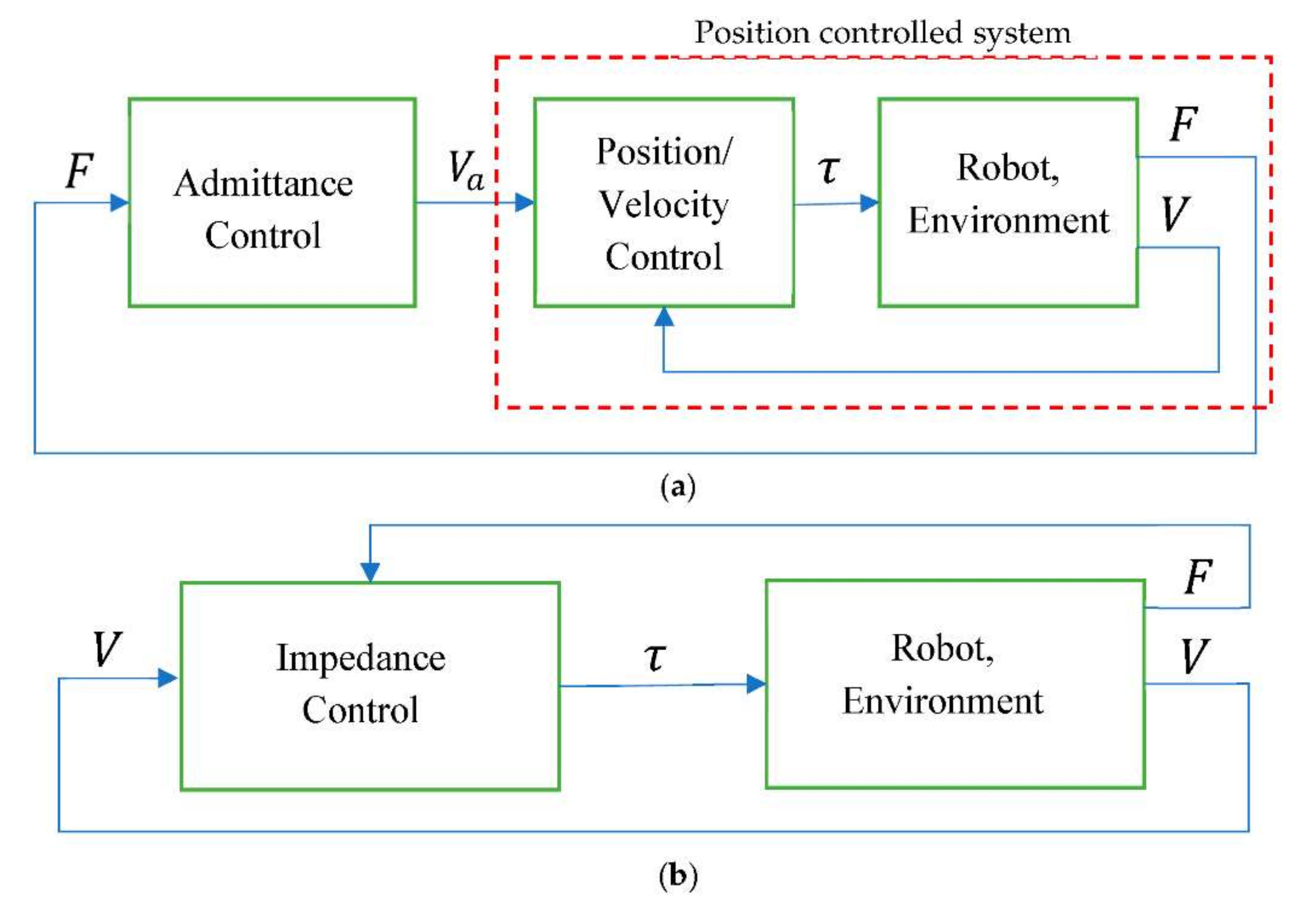
阻抗控制和導納控制都是機器人控制中的重要概念,兩者在實現方式、應用場景和要求等方面存在一些差異。
- 實現方式:阻抗控制通常是通過調整機器人的阻抗參數來實現對外部力的響應,它關注的是力和位置之間的關系,通常基于位置控制來實現。而導納控制則是通過調整機器人的導納參數來對外部環境進行適應,它關注的是力和速度之間的關系,通常基于速度控制來實現。
- 應用場景:阻抗控制通常用于機器人的剛性接觸和碰撞場景,例如在制造業中的裝配線或醫療行業中的手術機器人等場景中,需要機器人對外部物體進行準確的操控和穩定的交互。而導納控制則更適用于非剛性接觸的場景,例如在服務行業中的機器人與人或物品的交互,或者在自然界中的軟體機器人等場景中,需要機器人對外部環境進行靈活的適應和自然的交互。
- 要求:阻抗控制的要求在于精確地控制機器人的位置和力輸出,以實現對外部物體的穩定操控和避免對物體造成損害。而導納控制的要求在于靈活地適應外部環境的變化,以實現與外部環境的自然交互和避免對自身造成損害。


- 定義阻抗模型:根據機器人與外部環境的交互方式和要求,定義合適的阻抗模型,包括阻抗參數(如剛度、阻尼和質量等)的設定。
- 獲取傳感器信息:通過傳感器獲取機器人與外部環境的交互信息,如接觸力、位置和速度等。
- 計算誤差:根據阻抗模型和傳感器信息,計算出機器人與目標位置之間的誤差。
- 調整控制信號:根據誤差和其他控制信號,如速度和加速度等,調整機器人的控制信號。
- 控制機器人運動:將調整后的控制信號輸入到機器人的控制系統,控制機器人的運動軌跡和速度。
- 反饋調整:通過傳感器不斷獲取機器人與外部環境的交互信息,根據反饋信息對阻抗模型和控制信號進行調整,以實現更精確的阻抗控制。













)



糖果(鴿巢原理))


![[EFI]Atermiter X99 Turbo D4 E5-2630v3電腦 Hackintosh 黑蘋果efi引導文件](http://pic.xiahunao.cn/[EFI]Atermiter X99 Turbo D4 E5-2630v3電腦 Hackintosh 黑蘋果efi引導文件)

)



