在ROS中的rosbag是一個命令行工具,主要用于記錄、回放和分析rostopic中的數據。它可以將指定rostopic中的數據記錄到.bag后綴的數據包中,以便于進行離線分析和處理。
在ROS系統中,rosbag可以通過命令行工具或ROS節點來使用。
通過rosbag命令行工具,用戶可以記錄和回放bag文件,查看bag文件信息,以及對bag文件進行壓縮和解壓縮等操作。而ROS節點則可以訂閱和發布bag文件中的消息,以便在不同的ROS節點之間共享數據。
rosbag文件格式是一種二進制格式,它可以存儲ROS系統中的所有消息。每個消息都有一個時間戳和一個類型,消息可以按照時間順序進行排序。rosbag文件可以通過命令行工具或ROS節點來讀取和寫入。
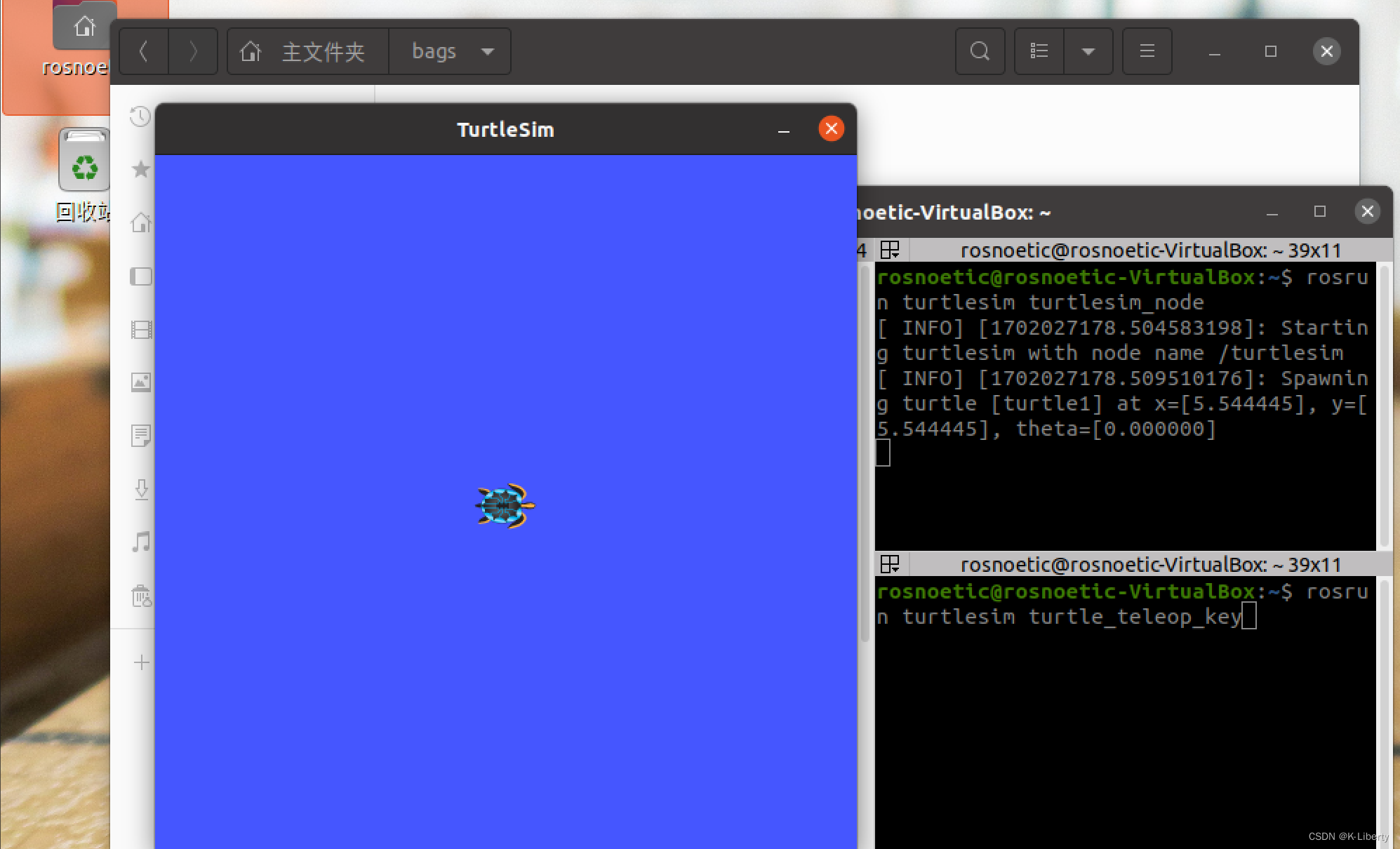
在具體使用過程中,可以首先通過roscore啟動ROS系統,然后運行特定的仿真程序,如turtlesim_node等。隨后,通過rosbag工具,可以將系統中產生的數據記錄到一個.bag文件中,進而可以在需要的時候對這些數據進行回放,達到重現特定場景的目的。
這對于數據的分析和調試工作具有重要的幫助,特別是在無法實時獲取數據的情況下。
rosbag的基本用法如下:
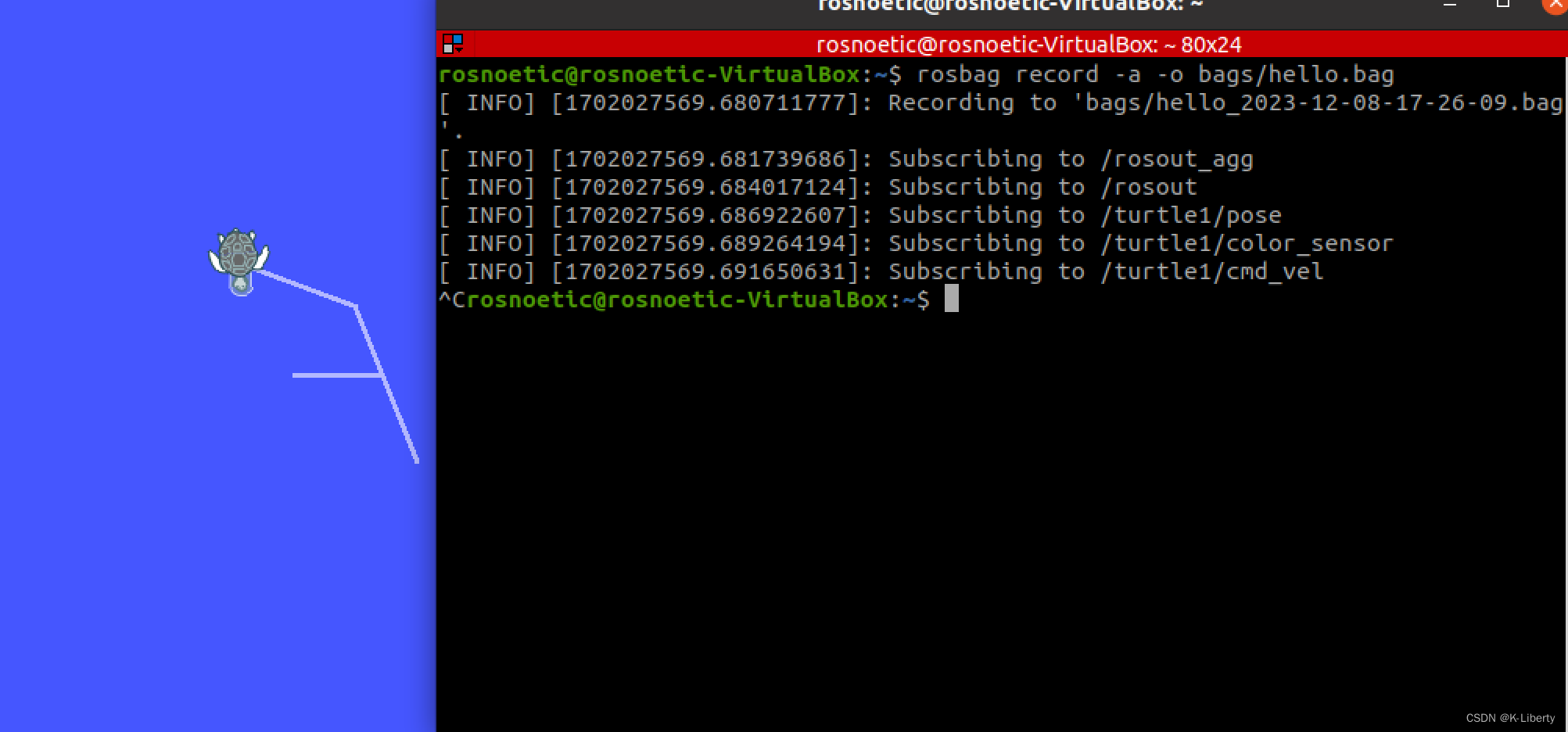
1、記錄bag文件:
rosbag record -a?????
記錄當前系統中所有發布到/主題的話題數據
(1)可以使用-o選項指定輸出文件名
例如 ???
rosbag record -o my_bag.bag
(2)還可以使用-b選項設置bag文件的位深度
例如 ??????
rosbag record -b 8 -o my_bag.bag? ? (這將以8位深度記錄數據)
2、停止記錄:????
Ctrl + C
當看到想要停止記錄的話題時,按Ctrl + C停止記錄。
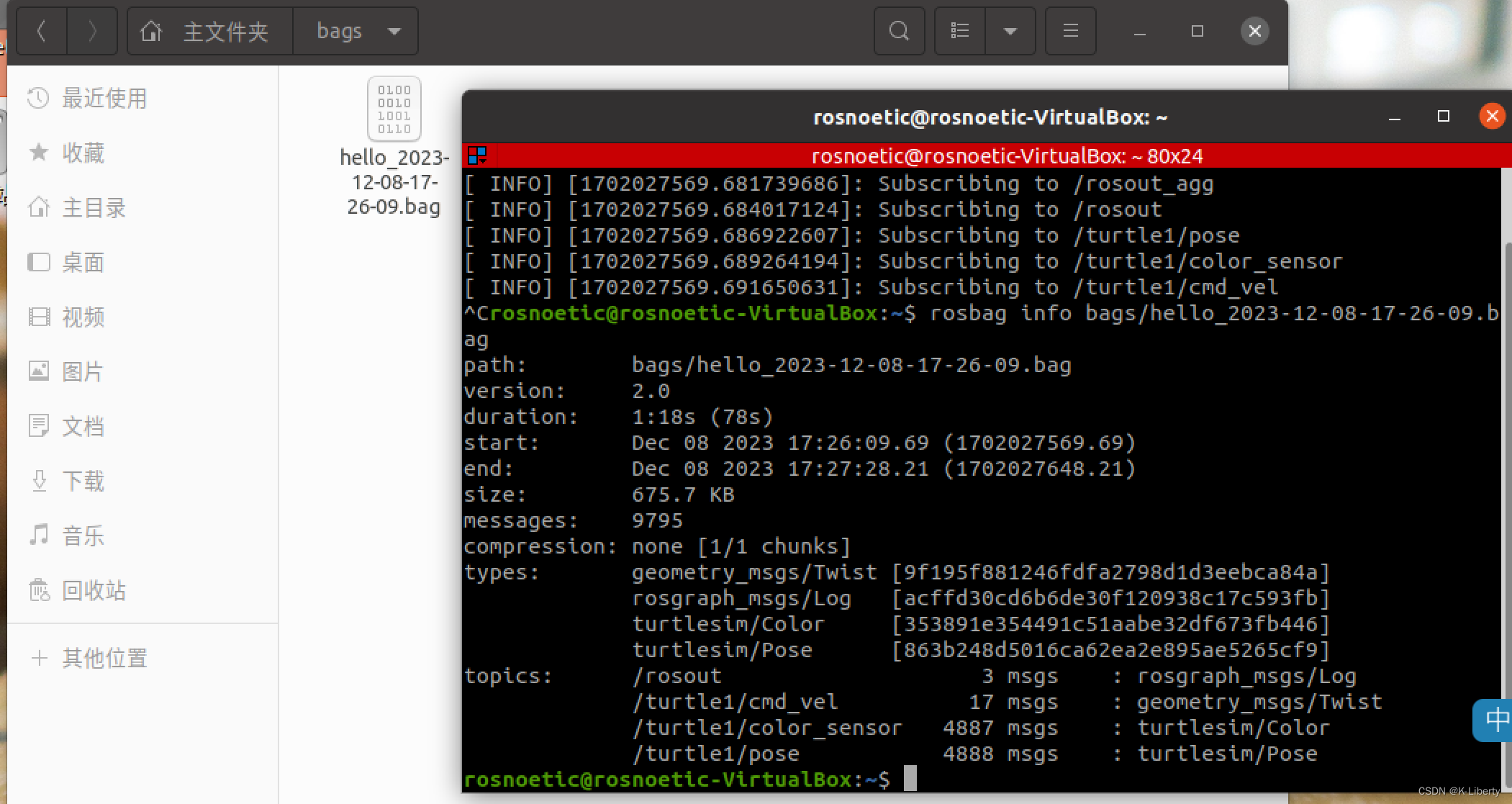
3、查看bag文件中的內容:
???rosbag info my_bag.bag
顯示bag文件中包含的話題、消息類型等信息。
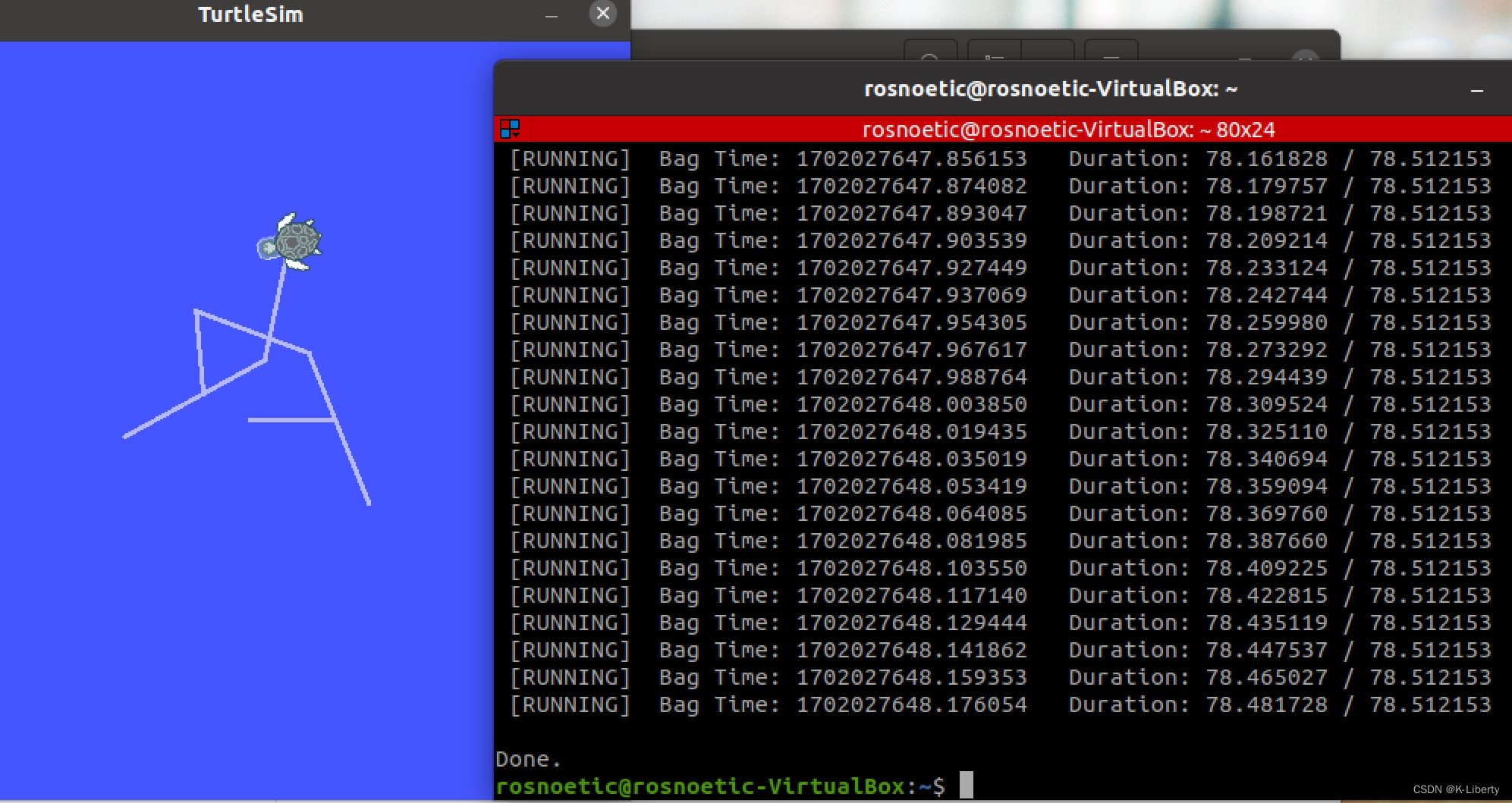
4、播放bag文件:
rosbag play my_bag.bag? ? ? ?
實時播放bag文件中的數據
(1)可以使用-r選項指定播放速度,
例如 ???
rosbag play -r 2 my_bag.bag? ?(以兩倍速播放數據)
(2)還可以使用-p選項指定播放某個特定話題的數據,
例如:
rosbag play -p /my_topic my_bag.bag? ?(將只播放/my_topic話題的數據)
5、查看已播放的bag文件大小:
rosbag info --size my_bag.bag
這將顯示已播放的bag文件的大小。
實現流程:
十九 漫水填充)











)




)

