探索Xsens動作捕捉如何改變人形機器人研發——使機器人能夠從人類運動中學習、更直觀地協作并彌合模擬與現實世界之間的差距。人形機器人技術是當今世界最令人興奮且最復雜的前沿領域之一。研究人員不僅致力于開發能夠像人類一樣行走和行動的機器人,還致力于開發能夠實時學習、協作和適應的機器人。要實現這些目標,需要對人體運動有深入的理解—而這正是Xsens慣性運動捕捉技術發揮關鍵作用的地方。?
下面,我們將探討Xsens在機器人研發中的四個核心應用,每個應用都由真實的研究和實際項目支持。
1. 利用動作捕捉數據訓練機器人的人工智能和機器學習模型
機器學習 (ML) 和人工智能 (AI) 正在改變機器人學習、規劃和與世界互動的方式。實現這一轉變的關鍵因素之一是獲取高質量的運動數據,而這正是Xsens的優勢所在。這些運動數據對于訓練機器人領域的 AI 算法、強化學習模型和神經網絡至關重要。?
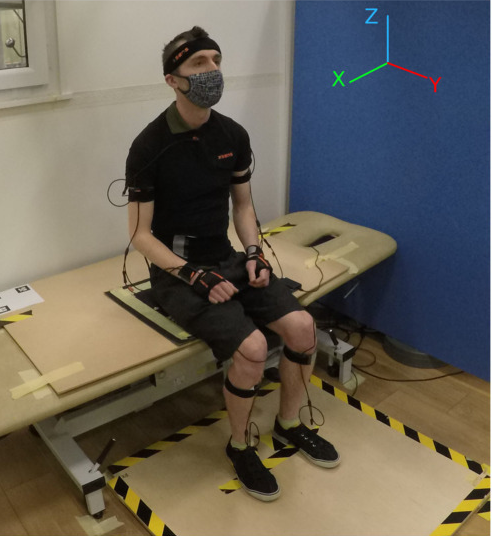
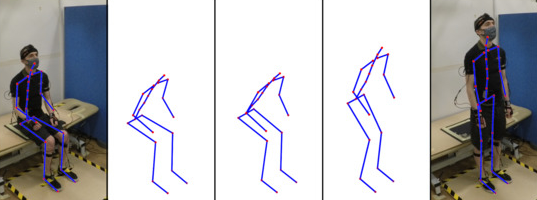
Xsens運動捕捉系統可生成豐富的帶時間戳的數據集,包括關節角度、肢體軌跡、身體方向等。這些數據集可以作為機器學習模型的寶貴輸入,從而實現更具適應性、更自然、更智能的機器人運動。?
由于Xsens可穿戴且無需標記,研究人員可以在現實環境中(而不僅僅是實驗室)收集訓練數據,從而獲得更強大、更可部署的模型。?
2. 創建人機控制系統
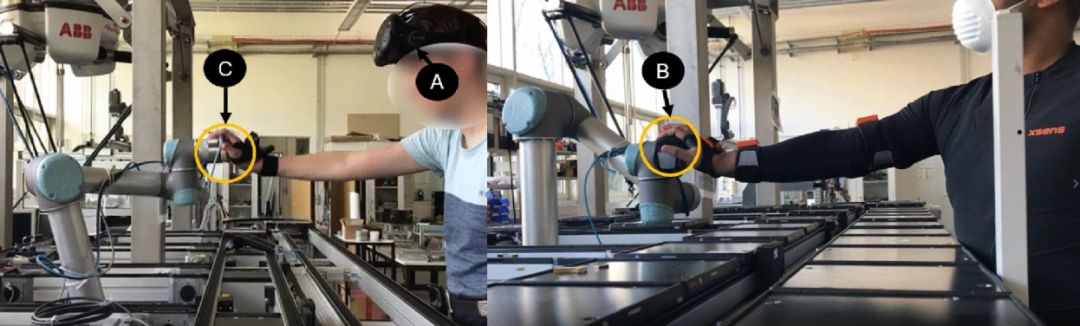
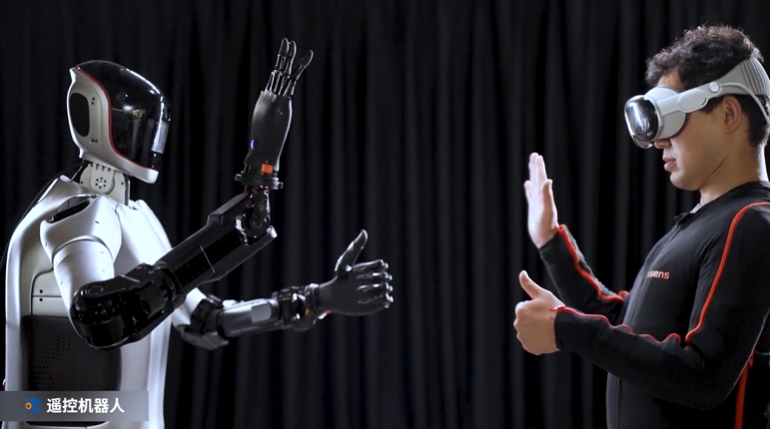
無論在制造、醫療還是服務環境中,當人類與機器人進行物理協作時,機器人必須能夠高保真度和高響應度地理解人體運動。動作捕捉在這些系統中發揮著至關重要的作用。?
研究弓箭手利用Xsens技術開發了自適應控制系統,使機器人能夠感知人類姿勢、預測動作并做出安全響應。其中一個例子就是意大利理工學院開發的自適應協作界面 (ACI),旨在促進人機系統之間更安全、更直觀的物理交互。Xsens的慣性傳感器用于將全身運動傳輸到該框架中,以實現協作任務。?
3. 通過模仿人類動作訓練機器人(從演示中學習)
在現代機器人技術中,通過演示來教授機器人(也稱為模仿學習或從演示中學習 (LfD))是一種日益增長的趨勢。開發人員無需手動編寫每個行為的程序,而是可以使用動作捕捉來向機器人展示如何行動,從而使其能夠從示例中學習復雜的任務。?
借助 Xsens,研究人員可以記錄人體全身運動并將其轉化為機器人行為。??
上海人形機器人項目展示了人形機器人如何通過直接分析Xsens傳感器捕捉到的人體運動數據,學習像人類一樣移動。這使得生成流暢、類似人類的動作成為可能。?

4. 將人類運動映射到機器人上
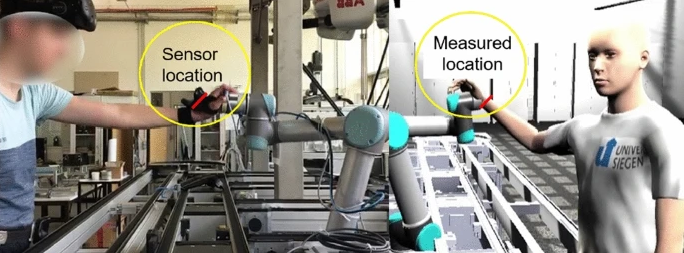
將人體運動映射到機器人肢體是機器人研發領域的常見挑戰。運動捕捉數據可用于精準捕捉人體的自然運動,并解決如何將這種運動轉化為具有不同物理約束或能力的機器人的動作。?
在一項旨在將人類手臂運動映射到冗余機器人機械手的研究中,基于IMU的數據(例如來自Xsens的數據)有助于推導關節配置和末端執行器路徑。這種映射是遠程操作、機器人技能學習和運動重定向的基礎。?
?
結論:真實的人類運動——真正的機器人智能?
Xsens 使機器人專家能夠超越模擬和代碼,從真實的人類運動中學習,驗證物理交互,并創造出在現實世界中行為更自然的機器人。無論是用于協作控制、模仿學習還是運動映射,動作捕捉正成為機器人專家工具包中不可或缺的一部分。?
關于搜維爾科技
搜維爾科技作為Xsens動作捕捉系統的中國大陸代理商全力為您提供優質服務。我們希望將更多標桿級與應用尖端技術的科技產品帶入到蓬勃發展的國內市場中,以協助更多企業與高校拓展技術開發、探索創新領域。





)









)



)