?? 引言:從單兵到集群,未來智能平臺的協同演進
從傳統的單兵執行任務到如今的“群體智能平臺編組”,現代感知系統正經歷一場由 AI、機器人與智能計算平臺驅動的深度變革。過去,履帶式無人平臺在平坦地形中承擔支援任務,而今,具備復雜地形通行能力、自主決策與任務執行能力的四足智能地面終端,正逐步成為未來任務體系中的關鍵節點。
2025 年“八一”節日前夕,央視發布的《攻堅——矢志強軍向一流》宣傳片中,一段罕見的系統演練畫面首次披露:由多型地面智能終端組成的自主集群協同單元,在實訓任務中快速穿插突入“任務區域”,完成多任務協同與高復雜度響應處置。其中,搭載智能控制模塊并具備場景演示能力的“機器狼”亮相,標志著我國在智能群體平臺構建方面的又一次技術躍升。
這不是未來構想,也不是演示動畫,而是 AI 算法、視頻感知、邊緣計算與集群控制等關鍵技術協同集成、真實部署的成果。
🎥 視頻通感系統:智能協同平臺的“神經中樞”
在這類系統中,有一項能力貫穿“感知—識別—協同—響應”的核心主線:視頻通感系統。
在“機器狼”這類智能平臺中,視頻不僅是“圖像”,更承擔以下關鍵能力:
-
? 實時環境建模:為 AI 提供第一時間輸入數據;
-
? 多終端協同:構建集群節點之間的感知共識;
-
? 精準任務響應:低延遲視頻流支撐動態控制決策;
-
? 多點調度支持:作為遠程指揮或自動調度的依據。
視頻系統已然成為整套智能集群的“感知中樞”。這不僅依賴高性能圖像采集設備,更依賴穩定、靈活、低延遲的視頻采集、編碼、傳輸與處理鏈路。大牛直播SDK正是其中的關鍵組件,支撐起“看得清、傳得快、接得上”的全鏈路通感能力。
🔧 一、平臺演進:集群式智能終端對視頻鏈路的新需求
📈 作戰形態演進路徑對比
| 演進階段 | 核心特征 | 控制模式 | 感知手段 |
|---|---|---|---|
| 🚶 單人終端 | 人為感知+手動操作 | 點對點響應 | 肉眼觀察、語音調度 |
| 🚜 履帶平臺 | 有人遠控、局部智能 | 單向任務執行 | 視頻監控輔助感知 |
| 🐺 四足群體智能平臺 | 多終端協同+AI調度 | 多點自主協同 | 實時視頻+AI識別 |
🎯 視頻通感系統的新挑戰
| 維度 | 技術要求 | 價值意義 |
|---|---|---|
| ? 延遲控制 | 全鏈路控制 <200ms | 決定系統響應速度 |
| 📡 多流并發 | 支持多設備同時推/拉流 | 實現群體智能感知 |
| 🌐 弱網自適應 | 自適應帶寬+斷點重連 | 保障信號連續性 |
| 🧩 模塊化部署 | 可嵌入國產/ARM/邊緣設備 | 提升平臺通用性 |
| 🤖 AI對接能力 | 支持YUV/RGB幀回調 | 實現實時識別聯動 |
🧠 二、大牛直播SDK在智能終端系統中的作用解析
在“機器狼”這類四足平臺中,感知、判斷、響應均圍繞視頻進行。大牛直播SDK提供了一套完整的視頻通信能力基座,已廣泛應用于智能機器人、無人機、特種裝備等場景。
?? 核心模塊與對應功能
| 模塊 | 能力 | 在平臺中的角色 |
|---|---|---|
| 📡 RTSP/RTMP 推送 | 高分辨率、穩定低延遲 | 終端視頻上傳鏈路 |
| 🎛 嵌入式RTSP服務 | 本地輕量部署 | 構建本地服務節點 |
| 📺 多路播放器 | 并發播放+斷網優化 | 指揮系統多畫面調度 |
| 🎞 YUV/RGB回調 | 原始幀輸出 | 支持AI模型對接分析 |
| 🧩 跨平臺兼容 | Android/Linux/ARM | 支持國產化與邊緣平臺 |
| 🔐 異常容錯機制 | 自動重連/恢復 | 保證關鍵時刻不中斷 |
🎯 視頻不再是“圖像展示”,而是“任務數據流”,連接每一次感知和每一個響應。
🔄 示例鏈路:大牛SDK通感路徑
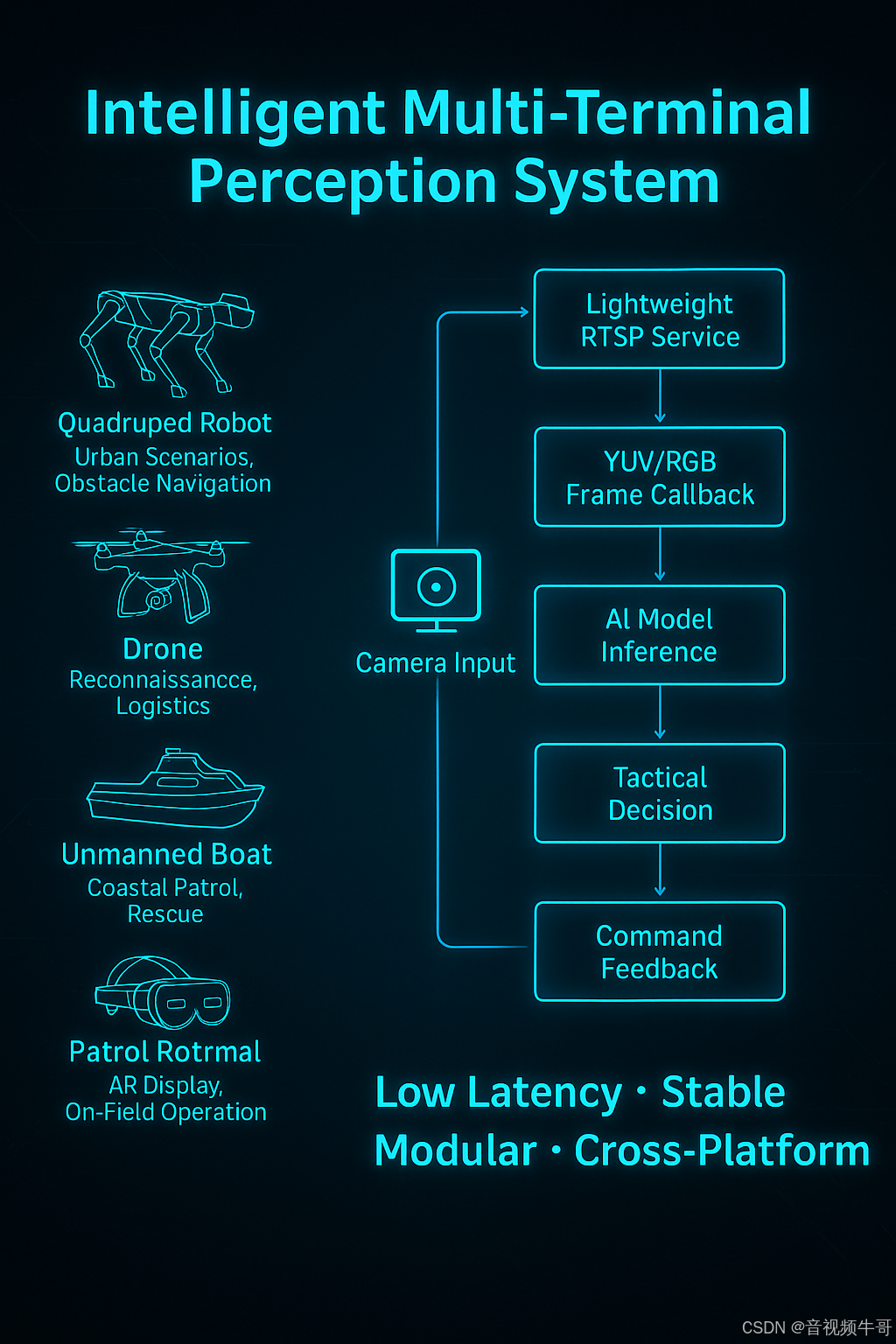
【采集端】
[攝像頭] → [大牛SDK 推送模塊(RTSP)]↓本地輕量級 RTSP 服務模塊↓
【指揮/AI處理端】
[大牛SDK 播放器] → [YUV幀回調] → [AI識別系統]↓[任務調度邏輯]↓
【反饋端】[打擊模塊 / 物資模塊 控制指令]
🌍 三、智能感知平臺中的“視頻神經鏈路”結構解讀
在 AI + 多終端協同體系中,視頻通感不僅是視覺入口,更是跨端決策與自動響應的“神經骨架”。
📌 視頻系統五大核心職能
| 職能 | 描述 |
|---|---|
| 🎥 視覺入口 | 實時采集視角畫面輸入 |
| 📡 數據橋梁 | 穩定傳輸保障信息同步 |
| 🧠 識別驅動 | 提供 AI 模型實時輸入流 |
| 📊 多端匯聚 | 構建任務態勢全圖 |
| 🔁 反饋媒介 | 實現快速指令閉環控制 |
🚀 四、應用拓展:從“機器狼”走向泛在“無人感知終端”
“機器狼”只是智能協同平臺的一個縮影。大牛直播SDK在更廣泛的無人平臺中發揮同樣的價值,形成統一的跨端視頻感知通道。
Android平臺RTSP播放器時延測試
🧭 應用類型對照表
| 平臺類型 | 典型應用 | SDK 支持能力 |
|---|---|---|
| 🐺 四足機器人 | 城市巡邏、障礙場景響應 | 輕量RTSP+幀回調 |
| 🚁 無人機 | 空中偵察/輸送 | RTMP推流+斷網重連 |
| 🚤 無人艇 | 水面警戒、港口協防 | 弱網優化+跨平臺適配 |
| 🚜 履帶平臺 | 工程排障、運輸任務 | 編碼器推流+同步播放 |
| 🤖 巡邏機器人 | 園區巡邏、廠區監控 | 嵌入式RTSP+AI接入 |
| 🧠 穿戴終端 | AR眼鏡/背負設備 | 超低延遲播放+回看支持 |
🎯 五、結語:視頻通感,智能系統的“信息基座”
隨著“機器狼”類平臺逐步進入實際部署階段,未來的智能系統協同將更加依賴“感知先行”。判斷源于信息,執行依賴反饋,而視頻通感鏈正是這一切的起點。
大牛直播SDK作為一套廣泛服務于工業級、AI級視頻應用的跨平臺通感系統,正成為構建未來多終端感知協同體系的“視頻中樞”。其穩定、可嵌入、可擴展的特性,使其不僅適用于機器人,也適配無人機、特種巡邏設備、應急終端等多類型智能節點。
在“無人 × 智能 × 多終端”的趨勢下,大牛直播SDK正通過標準化、模塊化能力,把復雜的視頻鏈路抽象為通用組件,為未來智能系統構建起真正意義上的“信息神經網絡”。
📄 免責聲明:本文基于公開資料與技術分析視角,所涉系統均為工業智能感知平臺,內容不涉及軍事用途或敏感信息。







:聲音的三要素)
)










