API征服者:Python抓取星鏈衛星實時軌跡
從基礎調用到工業級衛星追蹤系統實戰指南
一、太空數據時代:星鏈衛星的全球覆蓋
??星鏈衛星網絡規模??:
- 已發射衛星數量:4,000+
- 目標衛星總數:42,000
- 軌道高度:340km - 1,200km
- 覆蓋范圍:全球98%有人居住區
- 數據傳輸延遲:25-50ms
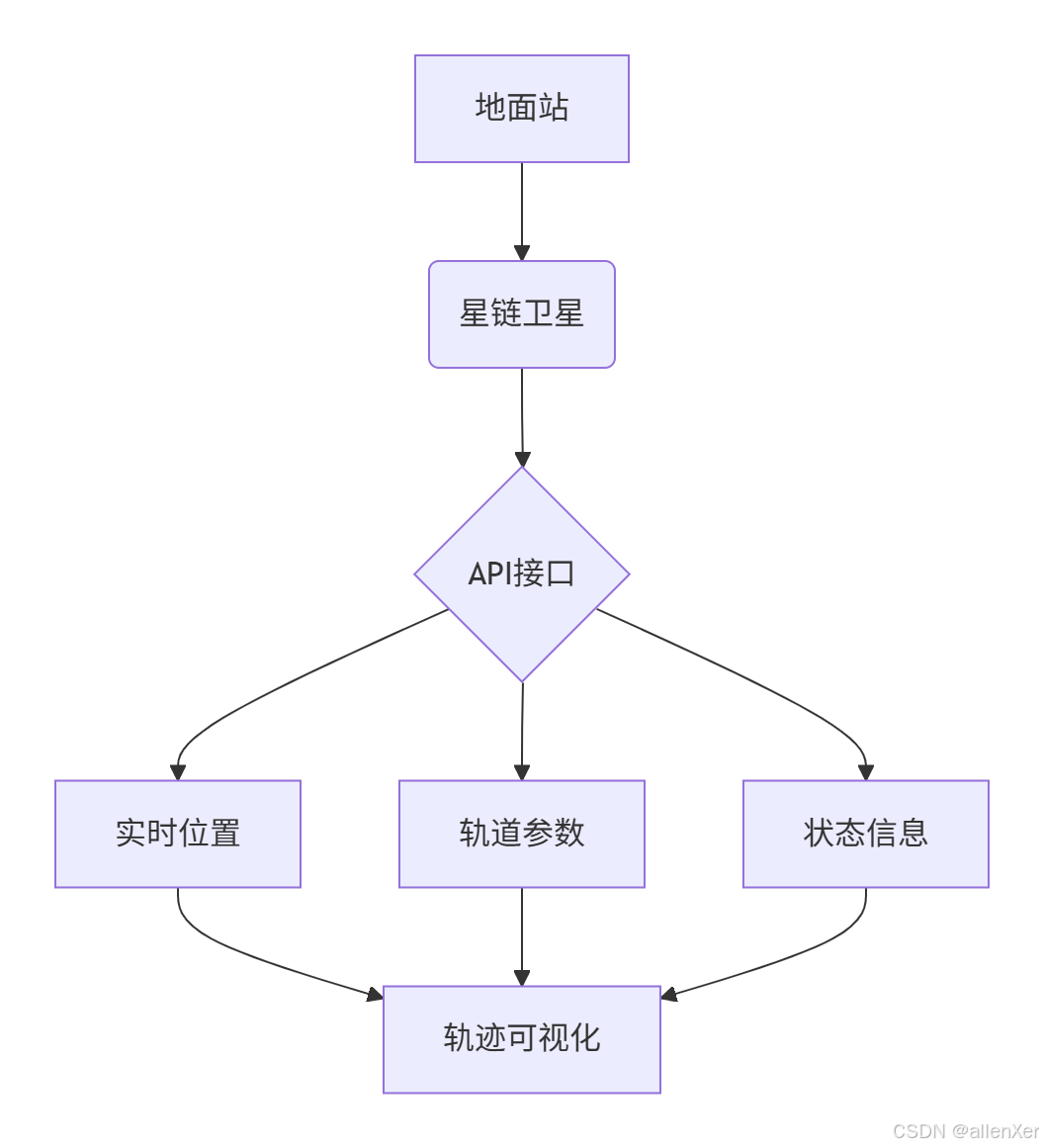
二、SpaceX API:太空數據的入口
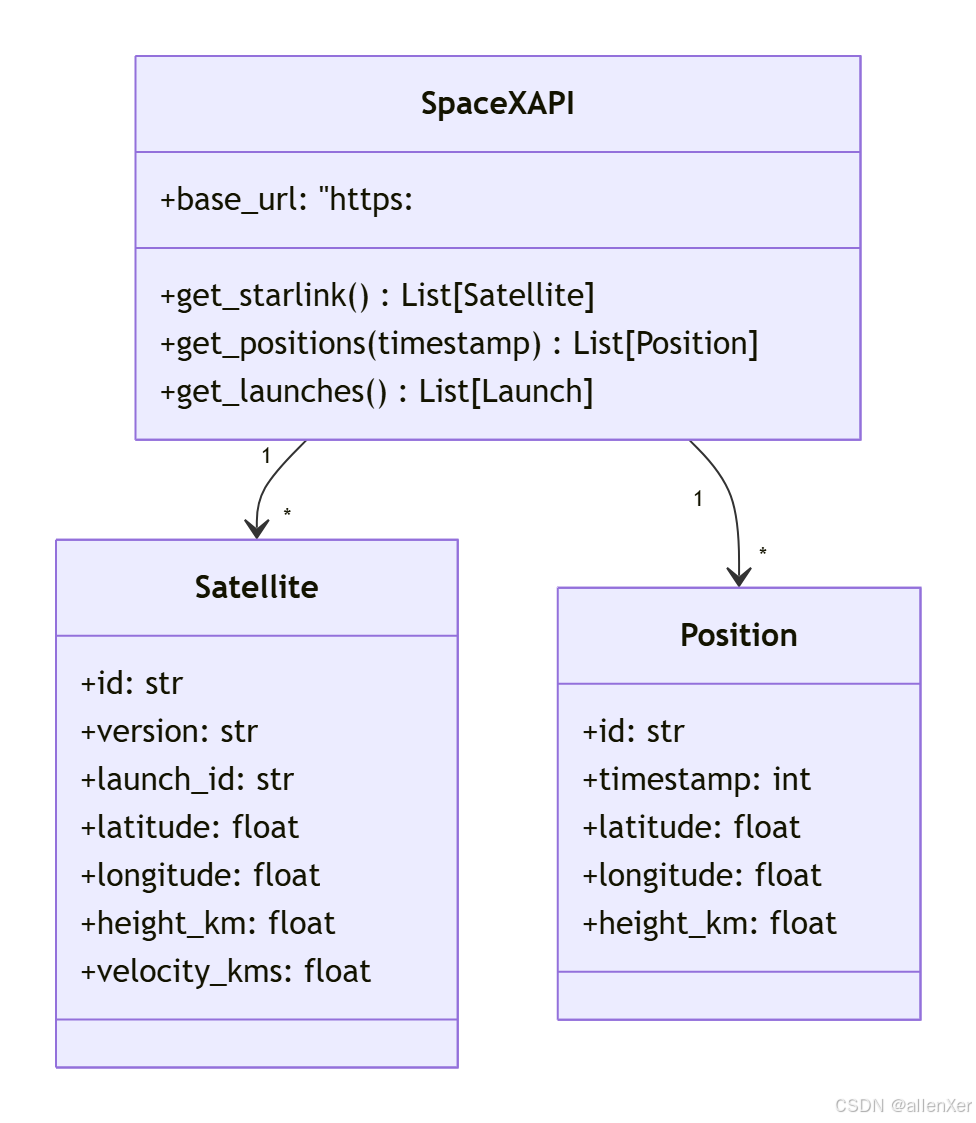
1. API接口解析
2. 免費API密鑰獲取
# 無需API密鑰即可訪問
import requestsdef get_starlink_satellites():"""獲取所有星鏈衛星信息"""url = "https://api.spacexdata.com/v4/starlink"response = requests.get(url)return response.json()# 示例
satellites = get_starlink_satellites()
print(f"獲取到{len(satellites)}顆衛星數據")三、基礎實現:衛星軌跡可視化
1. 獲取實時衛星位置
import requests
import pandas as pd
import timedef get_realtime_positions():"""獲取所有衛星實時位置"""url = "https://api.spacexdata.com/v4/starlink"response = requests.get(url)satellites = response.json()positions = []for sat in satellites:positions.append({'id': sat['id'],'name': sat['spaceTrack']['OBJECT_NAME'],'latitude': sat['latitude'],'longitude': sat['longitude'],'height_km': sat['height_km'],'velocity_kms': sat['velocity_kms'],'timestamp': sat['spaceTrack']['EPOCH']})return pd.DataFrame(positions)# 獲取數據
df = get_realtime_positions()
print(df.head())2. 3D地球可視化
import plotly.express as px
import plotly.graph_objects as godef plot_3d_earth(satellites):"""在3D地球上繪制衛星位置"""# 創建地球earth = go.Figure(go.Scattergeo())# 添加衛星fig = px.scatter_geo(satellites,lat='latitude',lon='longitude',size='height_km',color='velocity_kms',hover_name='name',projection='orthographic',title='星鏈衛星實時位置')# 更新布局fig.update_layout(geo=dict(showland=True,landcolor="rgb(212, 212, 212)",subunitcolor="rgb(255, 255, 255)",countrycolor="rgb(255, 255, 255)",showlakes=True,lakecolor="rgb(127, 205, 255)",showsubunits=True,showcountries=True,resolution=50,projection=dict(type='orthographic',rotation=dict(lon=0, lat=0, roll=0)),lonaxis=dict(showgrid=True,gridwidth=0.5,range=[-180, 180],dtick=10),lataxis=dict(showgrid=True,gridwidth=0.5,range=[-90, 90],dtick=10)))fig.show()# 可視化
plot_3d_earth(df)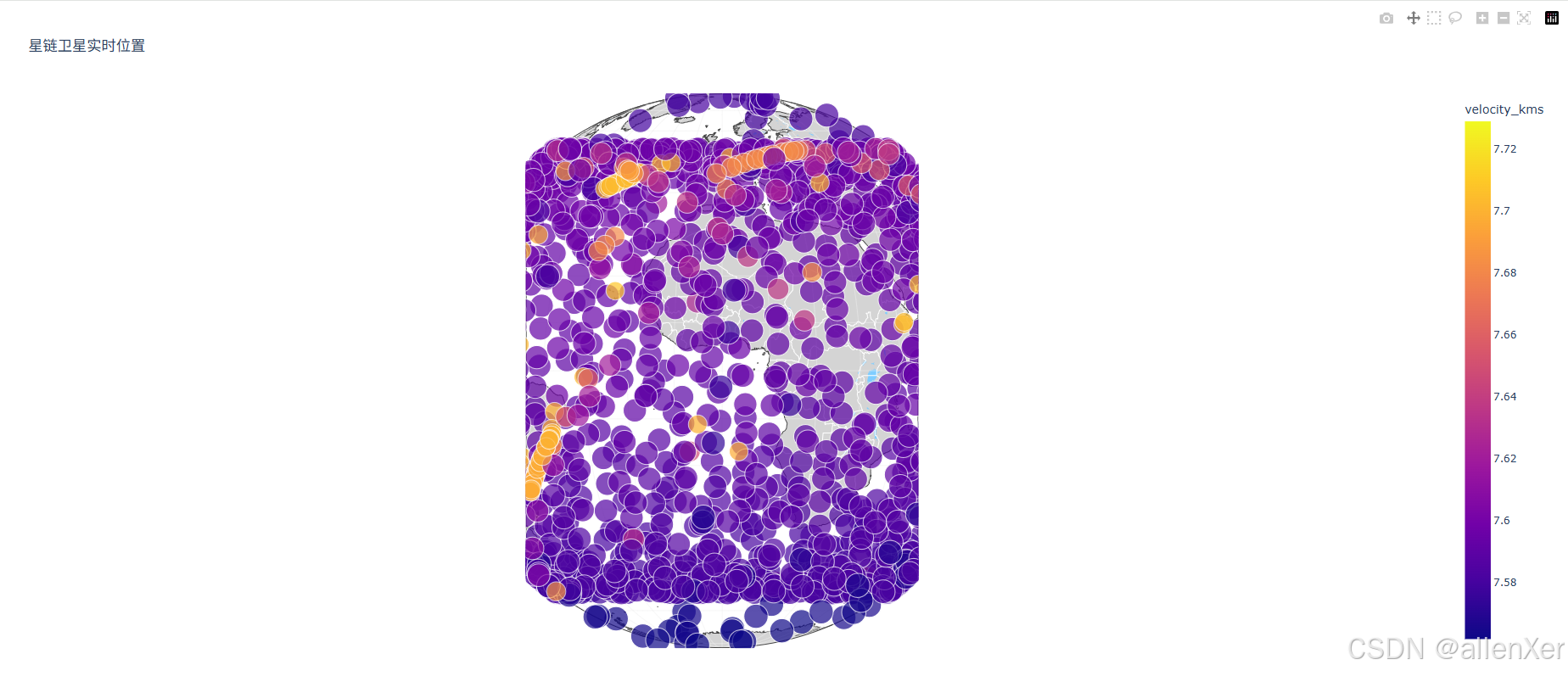
3. 實時軌跡動畫
def animate_satellite_movement(satellite_id):"""繪制衛星軌跡動畫"""# 獲取歷史位置url = f"https://api.spacexdata.com/v4/starlink/{satellite_id}/positions"response = requests.get(url)positions = response.json()# 創建動畫fig = px.scatter_geo(pd.DataFrame(positions),lat='latitude',lon='longitude',animation_frame='timestamp',projection='natural earth',title=f'衛星{satellite_id}軌跡動畫')fig.update_layout(geo=dict(showland=True,landcolor="rgb(212, 212, 212)",showocean=True,oceancolor="rgb(127, 205, 255)"))fig.show()# 示例:繪制單個衛星軌跡
animate_satellite_movement('5eed770f096e59000698560d')四、工業級優化:高性能衛星追蹤系統
1. 系統架構設計
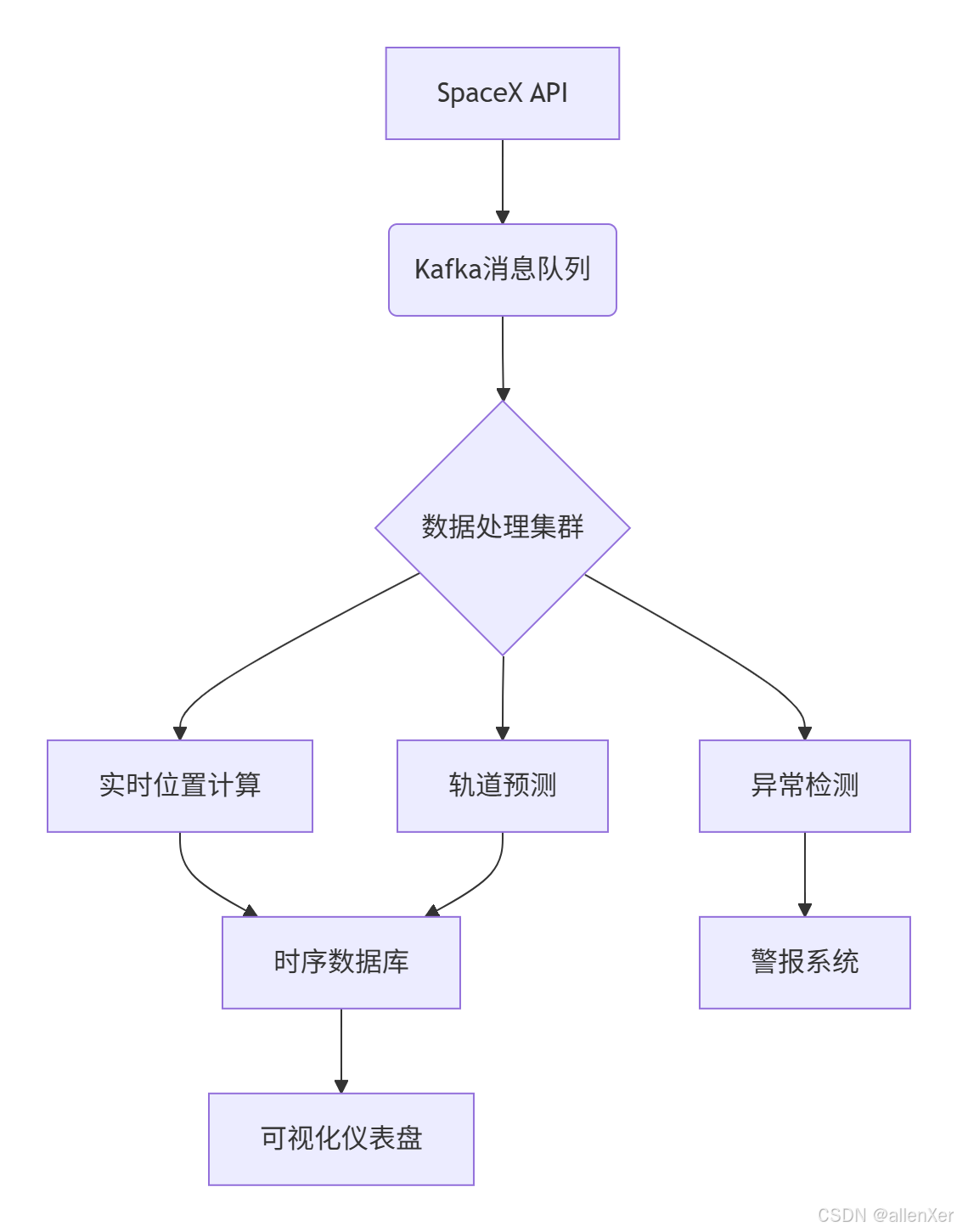
2. 分布式數據采集
import requests
from kafka import KafkaProducer
import json
import timedef produce_satellite_data():"""將衛星數據發送到Kafka"""producer = KafkaProducer(bootstrap_servers='localhost:9092',value_serializer=lambda v: json.dumps(v).encode('utf-8'))while True:try:# 獲取衛星數據url = "https://api.spacexdata.com/v4/starlink"response = requests.get(url)satellites = response.json()# 發送到Kafkafor sat in satellites:producer.send('satellite-positions', sat)print(f"發送{len(satellites)}條衛星數據")time.sleep(60) # 每分鐘更新except Exception as e:print(f"數據采集失敗: {str(e)}")time.sleep(300) # 5分鐘后重試# 啟動數據采集
# produce_satellite_data()3. 使用時序數據庫存儲
from influxdb_client import InfluxDBClient, Point
from influxdb_client.client.write_api import SYNCHRONOUSdef save_to_influxdb(satellite):"""將衛星數據保存到InfluxDB"""client = InfluxDBClient(url="http://localhost:8086", token="my-token", org="my-org")write_api = client.write_api(write_options=SYNCHRONOUS)point = Point("satellite_position") \.tag("satellite_id", satellite['id']) \.tag("name", satellite['spaceTrack']['OBJECT_NAME']) \.field("latitude", satellite['latitude']) \.field("longitude", satellite['longitude']) \.field("height_km", satellite['height_km']) \.field("velocity_kms", satellite['velocity_kms']) \.time(satellite['spaceTrack']['EPOCH'])write_api.write(bucket="satellite_data", record=point)client.close()4. 軌道預測算法
import numpy as np
from scipy.integrate import odeintdef satellite_orbit(satellite, hours=24):"""預測衛星未來軌道"""# 初始狀態r0 = [satellite['latitude'], satellite['longitude'], satellite['height_km']]v0 = [satellite['velocity_kms'], 0, 0] # 簡化模型# 時間點t = np.linspace(0, hours*3600, 100)# 微分方程def model(state, t):x, y, z, vx, vy, vz = state# 地球引力常數mu = 3.986004418e5 # km^3/s^2r = np.sqrt(x**2 + y**2 + z**2)ax = -mu * x / r**3ay = -mu * y / r**3az = -mu * z / r**3return [vx, vy, vz, ax, ay, az]# 求解軌道solution = odeint(model, [*r0, *v0], t)return solution[:, 0], solution[:, 1], solution[:, 2]五、實時監控儀表盤
1. 使用Dash創建衛星追蹤器
import dash
from dash import dcc, html
from dash.dependencies import Input, Output
import plotly.graph_objects as go
import requests
import pandas as pd
import numpy as npapp = dash.Dash(__name__)app.layout = html.Div([html.H1("星鏈衛星實時追蹤系統"),dcc.Dropdown(id='satellite-selector',options=[],value=None,multi=True),dcc.Graph(id='live-globe'),dcc.Graph(id='orbit-prediction'),dcc.Interval(id='interval-component',interval=10 * 1000, # 10秒更新n_intervals=0)
])@app.callback(Output('satellite-selector', 'options'),Input('interval-component', 'n_intervals')
)
def update_satellite_list(n):"""更新衛星列表"""url = "https://api.spacexdata.com/v4/starlink"response = requests.get(url)satellites = response.json()options = [{'label': sat['spaceTrack']['OBJECT_NAME'], 'value': sat['id']} for sat in satellites]return options@app.callback([Output('live-globe', 'figure'),Output('orbit-prediction', 'figure')],[Input('satellite-selector', 'value'),Input('interval-component', 'n_intervals')]
)
def update_plots(selected_ids, n):"""更新圖表"""# 獲取所有衛星數據url = "https://api.spacexdata.com/v4/starlink"response = requests.get(url)satellites = response.json()# 創建地球globe_fig = create_globe_figure(satellites, selected_ids)# 創建軌道預測orbit_fig = create_orbit_figure(satellites, selected_ids)return globe_fig, orbit_figdef create_globe_figure(satellites, selected_ids):"""創建3D地球圖"""# 創建地球fig = go.Figure(go.Scattergeo())# 添加所有衛星all_lats = [sat['latitude'] for sat in satellites]all_lons = [sat['longitude'] for sat in satellites]all_names = [sat['spaceTrack']['OBJECT_NAME'] for sat in satellites]fig.add_trace(go.Scattergeo(lon=all_lons,lat=all_lats,text=all_names,mode='markers',marker=dict(size=4,color='blue',opacity=0.5),name='所有衛星'))# 添加選中的衛星if selected_ids:selected_sats = [sat for sat in satellites if sat['id'] in selected_ids]sel_lats = [sat['latitude'] for sat in selected_sats]sel_lons = [sat['longitude'] for sat in selected_sats]sel_names = [sat['spaceTrack']['OBJECT_NAME'] for sat in selected_sats]fig.add_trace(go.Scattergeo(lon=sel_lons,lat=sel_lats,text=sel_names,mode='markers',marker=dict(size=8,color='red'),name='選中衛星'))# 更新布局fig.update_layout(title='星鏈衛星實時位置',geo=dict(projection_type='orthographic',showland=True,landcolor="rgb(212, 212, 212)",showocean=True,oceancolor="rgb(127, 205, 255)",showcountries=True))return figdef create_orbit_figure(satellites, selected_ids):"""創建軌道預測圖"""fig = go.Figure()if selected_ids:for sat_id in selected_ids:satellite = next((sat for sat in satellites if sat['id'] == sat_id), None)if satellite:# 預測軌道lats, lons, heights = satellite_orbit(satellite)# 添加軌道fig.add_trace(go.Scatter3d(x=lons,y=lats,z=heights,mode='lines',name=f"{satellite['spaceTrack']['OBJECT_NAME']}軌道"))# 添加當前位置fig.add_trace(go.Scatter3d(x=[satellite['longitude']],y=[satellite['latitude']],z=[satellite['height_km']],mode='markers',marker=dict(size=5, color='red'),name=f"{satellite['spaceTrack']['OBJECT_NAME']}當前位置"))# 更新布局fig.update_layout(title='衛星軌道預測',scene=dict(xaxis_title='經度',yaxis_title='緯度',zaxis_title='高度 (km)',camera=dict(eye=dict(x=1.5, y=1.5, z=0.1))),height=600)return figif __name__ == '__main__':app.run_server(debug=True)六、避坑指南:衛星數據獲取常見錯誤
1. 錯誤案例:頻繁請求導致API限制
# 反例:高頻請求
while True:data = requests.get(api_url)# 處理數據time.sleep(0.1) # 每秒10次請求# 結果:IP被封鎖# 正解:遵守API限制
import time
while True:data = requests.get(api_url)# 處理數據time.sleep(60) # 每分鐘1次請求2. 錯誤案例:忽略數據時效性
# 反例:使用過期數據
data = get_satellite_data()
# 1小時后仍然使用同一數據# 正解:檢查時間戳
def is_data_fresh(data, max_age=300):"""檢查數據是否新鮮"""latest_timestamp = max(sat['spaceTrack']['EPOCH'] for sat in data)current_time = time.time()return (current_time - latest_timestamp) < max_age3. 錯誤案例:坐標轉換錯誤
# 反例:直接使用經緯度繪制3D位置
x = longitude
y = latitude
z = height_km# 正解:轉換為笛卡爾坐標
def spherical_to_cartesian(lat, lon, height):"""球坐標轉笛卡爾坐標"""# 地球半徑R = 6371 # km# 轉換為弧度lat_rad = np.radians(lat)lon_rad = np.radians(lon)# 計算笛卡爾坐標x = (R + height) * np.cos(lat_rad) * np.cos(lon_rad)y = (R + height) * np.cos(lat_rad) * np.sin(lon_rad)z = (R + height) * np.sin(lat_rad)return x, y, z七、工業級應用:衛星通信模擬系統
1. 衛星覆蓋范圍計算
def calculate_coverage(satellite, ground_point):"""計算衛星對地面點的覆蓋情況"""# 衛星位置sat_pos = spherical_to_cartesian(satellite['latitude'],satellite['longitude'],satellite['height_km'])# 地面點位置ground_pos = spherical_to_cartesian(ground_point['lat'],ground_point['lon'],0)# 計算距離distance = np.linalg.norm(np.array(sat_pos) - np.array(ground_pos))# 計算仰角elevation = np.degrees(np.arcsin((np.dot(sat_pos, ground_pos)) / (distance * np.linalg.norm(ground_pos))))# 判斷是否可見return elevation > 5 # 仰角大于5度可見2. 全球覆蓋可視化
def plot_global_coverage(satellites):"""可視化全球覆蓋情況"""# 創建網格lats = np.arange(-90, 90, 1)lons = np.arange(-180, 180, 1)# 計算覆蓋矩陣coverage = np.zeros((len(lats), len(lons)))for i, lat in enumerate(lats):for j, lon in enumerate(lons):covered = Falsefor sat in satellites:if calculate_coverage(sat, {'lat': lat, 'lon': lon}):covered = Truebreakcoverage[i, j] = 1 if covered else 0# 創建熱力圖fig = go.Figure(go.Heatmap(x=lons,y=lats,z=coverage,colorscale=[[0, 'gray'], [1, 'green']],showscale=False))fig.update_layout(title='星鏈全球覆蓋圖',xaxis_title='經度',yaxis_title='緯度',height=600)fig.show()3. 延遲計算模型
def calculate_latency(satellite, ground_point1, ground_point2):"""計算兩點間通過衛星的通信延遲"""# 計算距離sat_pos = spherical_to_cartesian(satellite['latitude'],satellite['longitude'],satellite['height_km'])point1_pos = spherical_to_cartesian(ground_point1['lat'],ground_point1['lon'],0)point2_pos = spherical_to_cartesian(ground_point2['lat'],ground_point2['lon'],0)dist1 = np.linalg.norm(np.array(sat_pos) - np.array(point1_pos))dist2 = np.linalg.norm(np.array(sat_pos) - np.array(point2_pos))# 計算延遲(光速:299792 km/s)latency = (dist1 + dist2) / 299792 * 1000 # 毫秒return latency結語:成為太空數據征服者
通過本指南,您已掌握:
- 🛰? SpaceX API調用技巧
- 📡 衛星數據獲取與解析
- 🌍 3D地球可視化技術
- 🚀 軌道預測算法
- ? 實時監控系統開發
- 📶 通信延遲計算
??下一步行動??:
- 部署你的衛星追蹤系統
- 添加更多衛星數據源
- 開發通信優化算法
- 構建預測模型
- 分享你的太空發現







-組件)











